


X線を照射した弾性変形したp-Si結晶の表面導電率の変化
要約
本論文では、弾性一軸機械的応力の影響下での照射および非照射p-Si単結晶の導電率の変化を調べた。機械的応力とX線照射線量の関数としての表面伝導率の依存性を説明するための分析式が提案されました。 「ソーラー」シリコンの表面にある4角のナノ粒子は、機械的応力下での導電率の変化に影響を与えることが示されました。 X線照射がシリコンに点欠陥を発生させることが立証されました。これらの欠陥は転位の動きを抑制します。以前に照射された「電子」シリコンのサンプルの抵抗率は、特定の変形速度での一軸圧縮の影響にわずかに敏感であることが示されました。
背景
現代の電子技術の分野で半導体デバイスを広く使用するには、X線照射や機械的変形などの外部の影響下で高い安定性を備えた新しい半導体材料の調査が必要です。現在、シリコンは、放射線分野で動作する高感度検出器やその他の半導体センサーに積極的に使用されています[1]。
ほとんどの記事は、n-Siの導電率に対する塑性変形の影響に特化しています[2、3]。そのため、p-Si結晶の特性に対する弾性変形の影響は依然として重要な科学的課題であると考えられています。変形した結晶中のキャリア濃度と不純物の再分布は、特に結晶の表面での欠陥の効果的なゲッターである転位の存在によって特徴付けられることがよくあります[4、5]。結晶電子サブシステムの励起には、対応する転位移動度の変化も伴うことが知られています[3、6]。電子サブシステムの励起は、放射線や静電界などの外部の影響の結果である可能性があります。シリコン結晶の転位の特徴は、転位の周りに高濃度の点欠陥(コットレル雲)が存在することです。
結晶の表面は電離放射線に最も敏感です。そのため、シリコン結晶の表層での放射線誘発プロセスの調査は依然として適切であると考えられています。 Al接点が堆積した表面は、構造欠陥の効果的なゲッターです[5、6、7]。堆積した金属膜の下には、膜と半導体の格子定数の不一致により機械的応力が発生します[5、7]。これらの応力は、接触層での欠陥ゲッタリング(不純物原子、格子間シリコン原子、および空孔)のプロセスを刺激します。
メソッド
チョクラルスキー法(ρ)で成長させたp型導電性のシリコン単結晶 =10–20Ωcm)、研究論文で使用されました。これらの単結晶には2つのタイプがあります。(1)電子機器用シリコン-表面(111)上のいわゆる転位のない(または電子)単結晶で、三角形のエッチピットの濃度は10 <を超えません。 sup> 2 cm −2 (図1aおよび2)、および(2)表面(111)上のシリコンの「太陽」単結晶。4角ピラミッド(図1b)の形の欠陥は、比較的バックグラウンドカーボンの高濃度(≈5×10 16 cm -3 )および酸素(≈1.8×10 18 cm -3 )不純物。 4角のピラミッドも同じように配置されています。ピラミッドベースのサイズは10nmから10μmです。
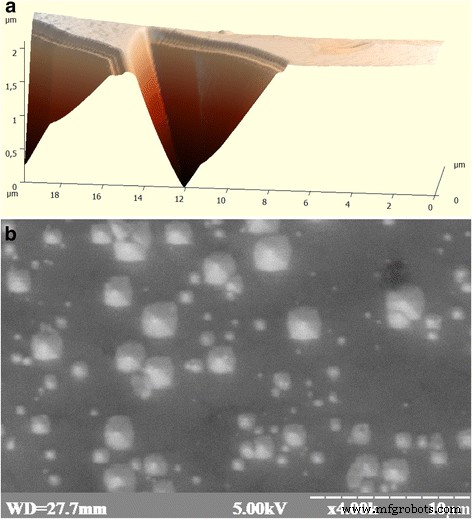
実験サンプルの表面の外観: a 原子間力顕微鏡および b の分野で得られたp-Si結晶の表面に転位エッチングピットが出現する 太陽結晶の超微視的表面(111)の出現
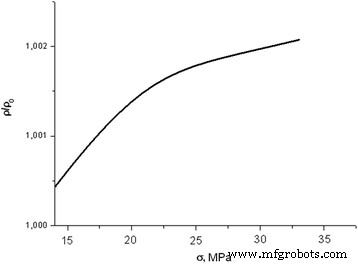
変形速度8μm/分での弾性変形中の一次転位のないサンプルの縦方向抵抗の依存性
4角度のピラミッド型エッチングホールに対応するクラスターの形成において、シリコンの酸化物層、点欠陥、およびシリコン、特にアルファシリコンの構造状態が異なる層が関与する可能性があることが示されました[8、9]。
>実験サンプルは、サンディングと化学研磨の後に4×3.7×7.6mmの寸法を得ました。サンプル表面(111)の端に幅1.5 mmの2つのストリップの形をしたオーミック接触は、真空(10 -4 )でのアルミニウムの熱蒸発によって作成されました。 Pa)593Kサンプルに加熱。電気伝導率の測定は、真空クライオスタット内で残留ガス圧10 -3 で実施しました。 15〜40 MPaの出力と8または32μm/分の変形速度で端に([\(11 \ overline {2} \)]に向かって)一軸圧縮を適用する場合のPa。サンプルは全範囲のX線( W )で照射されました -アノード、50 kV、10 mA)、両側にアルミニウム接点がコーティングされています。 X線源と結晶の間の距離は最小でした(1〜2 mm)。吸収線量は30分ごとに130Gyずつ増加していることがわかりました。作業では、最初に実験サンプルを照射し、その後、変形過程での抵抗を測定しました。
結果と考察
変形方向(ρ)に沿った誘導機械伝導率の変化に関する研究結果 (σ ))一軸応力(σ)の影響下でのp型導電率の「転位のない」サンプルの )を図2に示します。荷重が0から40 MPa(変形速度8μm/分)に増加すると、45分続きます。
変形の過程で、転位のないサンプルの抵抗はわずかに増加します。照射されていない結晶の場合、変形速度の変化は、依存性の一般的な見方に実質的に影響を与えなかったことに注意する必要がありますρ (σ )[10、11]。照射されたサンプルでも同様の依存性が得られました(図3)。 X線照射の作用後に抵抗の増加が観察された。ただし、依存の性質ρ (σ )は、照射されていないサンプルとは多少異なることが観察されました。
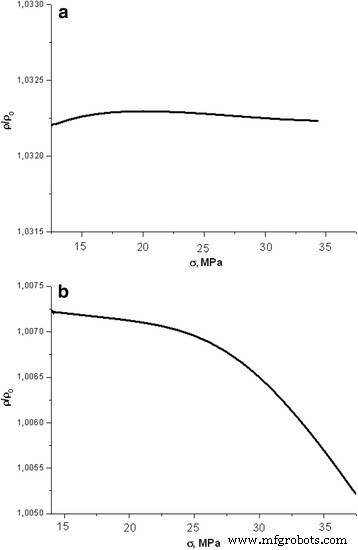
照射された( D )の縦方向抵抗の依存性 =130 Gy)8μm/分の速度で圧縮強度が増加する弾性変形中の転位のないシリコンのサンプル( a )および32μm/分( b )
X線の影響により、8μm/分の速度で圧縮している間、抵抗はほとんど変化しないことがわかります(図3a)。 260Gyと480Gyにさらされたサンプルの依存関係のグラフも同様の外観でした。以前の研究[11]で、照射プロセス中に吸収線量の平方根に比例して抵抗が増加することが示されました。
圧縮率が4倍に増加すると(8から32μm/分)、抵抗率の負荷への依存性の性質が変化します(図3b)。圧縮の過程で照射されたサンプルの抵抗はわずかに(<0.2%)減少します。導電率の変化に関するすべての測定は、実験で抵抗率の小さな変化を正しく分析することができるように、高精度(±0.045%)で実行されたことに注意する必要があります。
図3に示す依存関係は、縦方向の抵抗( D )の変化を測定してから7日後に受信されたことに注意してください。 =130 Gy)8μm/分の速度で転位のないサンプル(図3a)。与えられた時間枠の間に、抵抗はほぼ元の値、つまり、照射と機械的応力の適用後に観察された抵抗の値に戻りました。
弾性圧縮の作用に対する抵抗依存性の測定および放射線への曝露後の同様の研究も、p型導電性の「ソーラーシリコン」に基づく実験サンプルに対して実施されました(図4)。表面(111)。
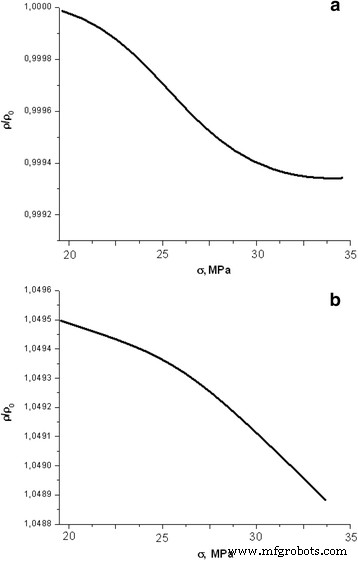
圧縮強度の増加に伴う弾性変形中のソーラーシリコンの縦方向抵抗の依存性: a D =0 Gy、圧縮速度32μm/分; b D =130Gy圧縮速度8μm/分
まず、機械的応力の大きさに対するp-Siタイプの「ソーラー」シリコンの抵抗変化の性質は、圧縮速度とは無関係であることがわかりました。同様の特徴は、非照射サンプルと照射サンプルの両方で観察されました。縦方向の抵抗の機械的応力への依存性は比較的小さな値(<0.5%)で変化し、負荷の増加に伴ってわずかに減少します(図4a)。
実験サンプルにX線(480 Gy)を照射しても、弾性変形中の「ソーラー」シリコンの縦方向の抵抗の変化の一般的な性質には実質的に影響しません(図4b)。電子サンプルの場合、抵抗は吸収線量の平方根に比例します[11]。機械的ストレスの間、抵抗率は非常に小さい値(±0.1%)で減少します。
以前の研究[12、13]で示されたように、誘電体膜SiO 2 正電荷を持っています。したがって、空間電荷表面層は、(抵抗が高く)穴が空になり、厚さが w になります。 (図5)はシリコンで作成されています。 Si-SiO 2 に近い インターフェースには、穴が少なくなります。
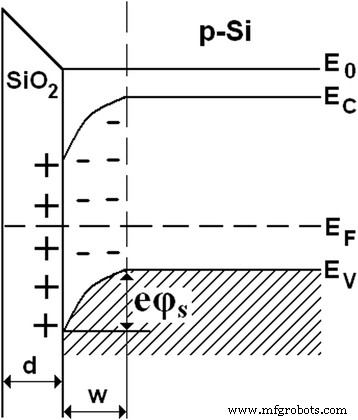
半導体-絶縁体の界面に与えられた正電荷の下でのp型導体のエネルギーバンドの歪み
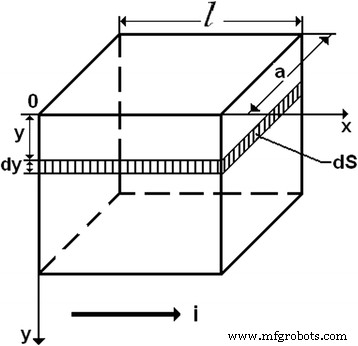
表面電位が変化すると、シリコンの表面層にある正孔の濃度が変化し、その結果、その導電率が変化します(φ S )。平面四角形プレートを考えてみましょう(図6)。電流をプレートの平面に平行に、そのエッジの1つの方向に流します。
導電率の計算
厚さ dy の薄い平行層を取りました および断面積 dS [14]ある程度の距離( y )表面から。この層は均質な半導体と見なすことができ、その抵抗は次の式に従って決定できます。
$$ d R =\ rho \ frac {l} {dS}、$$(1)$$ d S =a dy。 $$(2)プレートが正方形なので( l = a )、層の導電率は
$$ d \ lambda =\ frac {1} {dR} =\ sigma d y、$$(3)ここで、\(\ sigma =\ frac {1} {\ rho} \)は、 dy の層の電気伝導率です。 y での厚さ 表面からの距離。 p型半導体の場合、導電率は\(\ sigma \ approx e p(y){\ mu} _p \)と書くことができます。次に、
$$ d \ lambda =e p(y){\ mu} _pdy。 $$(4)全表面抵抗率(λ)を見つけましょう )。ゼロからいくつかの持続可能なデバイスクリーニングの厚さまでの範囲の最後の式を統合する必要があります。または、たとえば、空間電荷領域の幅を制限する必要があります w :
$$ \ lambda ={\ displaystyle \ underset {0} {\ overset {w} {\ int}} ep(y){\ mu} _p dy =e {\ mu} _p {\ displaystyle \ underset {0} { \ overset {w} {\ int}} p(y)dy}}。 $$(5)一般に、空乏化した表面層の穴の濃度は、座標( y )だけに依存するわけではありません。 )だけでなく、加えられた機械的応力(σ meh )。これは、2つのコンポーネントによって決定されます: p ( y 、σ meh )= p 1 ( y )− p 2 (σ meh )、ここで p 1 ( y )は、半導体表面からの距離と p の変化に伴うキャリア濃度の変化に対応する成分です。 2 (σ meh )は、機械的応力中の転位での捕獲により、穴の濃度がどれだけ減少するかを示すコンポーネントです。また、穴の移動度は一定値ではありません。それは機械的応力に依存します。したがって、総表面抵抗率の式は次の形式で記述できます。
$$ \ lambda =e {\ mu} _p \ left({\ sigma} _ {meh} \ right){\ displaystyle \ underset {0} {\ overset {w} {\ int}} \ left({p} _1(y)-{p} _2 \ left({\ sigma} _ {meh} \ right)\ right)dy}。 $$(6)機械的に誘発された導電率の変化は次のように書くことができます:
$$ \ lambda \ left({\ sigma} _ {meh} \ right)=e {\ mu} _p \ left({\ sigma} _ {meh} \ right)\ cdot \ Big({\ displaystyle \ underset { 0} {\ overset {w} {\ int}} {p} _1(y)dy-{\ displaystyle \ underset {0} {\ overset {w} {\ int}} {p} _2 \ left({\ sigma} _ {meh} \ right)dy} \ Big)=e {\ mu} _p \ left({\ sigma} _ {meh} \ right)\ cdot \ left \ {{\ beta} _1-{\ beta } _2 \ left({\ sigma} _ {meh} \ right)\ right \}}、$$(7)ここで、\({\ beta} _1 ={\ displaystyle \ underset {0} {\ overset {w} {\ int}} {p} _1(y)dy; \ kern1em {\ beta} _2 \ left({\ sigma } _ {meh} \ right)={\ displaystyle \ underset {0} {\ overset {w} {\ int}} {p} _2 \ left({\ sigma} _ {meh} \ right)dy}} ={p} _2 \ left({\ sigma} _ {meh} \ right){\ displaystyle \ underset {0} {\ overset {w} {\ int}} dy =} w \ cdot {p} _2 \ left( {\ sigma} _ {meh} \ right)\)。
p なので、注意する必要があります 1 ( y )および p 2 (σ meh )また、照射効果、要因βに依存します 1 、β 2 、およびμ p X線の線量に依存します。したがって、前の表面導電率の式(λ (σ meh 、0 ))およびその後(λ (σ meh 、 D ))照射は次のように書くことができます:
$$ \ lambda \ left({\ sigma} _ {meh}、0 \ right)=e {\ mu} _p \ left({\ sigma} _ {meh}、0 \ right)\ cdot \ Big({\ displaystyle \ underset {0} {\ overset {w} {\ int}} {p} _1 \ left(y、0 \ right)dy- w \ cdot {p} _2 \ left({\ sigma} _ {meh} 、0 \ right)\ Big)=e {\ mu} _p \ left({\ sigma} _ {meh}、0 \ right)\ cdot \ left \ {{\ beta} _1(0)-{\ beta} _2 \ left({\ sigma} _ {meh}、0 \ right)\ right \}}。 $$(8)$$ \ lambda \ left({\ sigma} _ {meh}、D \ right)=e {\ mu} _p \ left({\ sigma} _ {meh}、D \ right)\ cdot \ Big({\ displaystyle \ underset {0} {\ overset {w} {\ int}} {p} _1 \ left(y、D \ right)dy- w \ cdot {p} _2 \ left({\ sigma } _ {meh}、D \ right)\ Big)=e {\ mu} _p \ left({\ sigma} _ {meh}、D \ right)\ cdot \ left \ {{\ beta} _1(D) -{\ beta} _2 \ left({\ sigma} _ {meh}、D \ right)\ right \}}。 $$(9)サンプルの長さが長方形の場合( l )と幅( a )、次のように総表面導電率の最終式を書くことができます:
$$ \ lambda \ left({\ sigma} _ {meh}、D \ right)=\ frac {a} {l} e {\ mu} _p \ left({\ sigma} _ {meh}、D \ right )\ left \ {{\ beta} _1(D)-{\ beta} _2 \ left({\ sigma} _ {meh}、D \ right)\ right \}、$$(10)ここで
$$ {\ beta} _1(D)={\ displaystyle \ underset {0} {\ overset {w} {\ int}} {p} _1 \ left(y、D \ right)dy、\ kern1em} {\ beta} _2 \ left({\ sigma} _ {meh}、D \ right)=w \ cdot {p} _2 \ left({\ sigma} _ {meh}、D \ right)。 $$(11)機械的応力の影響下で照射されたp-Si結晶の表面伝導率の変化は、主に次の3つのパラメータの変化によって決定されます。β 1 、β 2 、およびμ p 。
私たちの以前の研究[10,11,12,13]によると、電子シリコンへのX線曝露の影響は、SiO 2 > 。その結果、係数β 1 :β 1 ( D )> β 1 ( 0 )わずかに増加します。 「ソーラー」シリコンの場合、反対の依存関係が観察されます:β 1 ( D )<β 1 ( 0 。
因子βについて 2 、その変化は主に p の変化によって決定されます 2 (σ meh 、D )放射線の影響下。これらの変更は、パラメータβの変更と比較してはるかに重要です。 1 。 X線照射は、転位運動のストッパーとして機能するシリコンの点欠陥の生成をトリガーします。その結果、放射線に被曝した後、係数β 2 これらのサンプルでは、両方のタイプの実験サンプルで急激に減少します(転位がトラップされた穴の数が減少します)p-Si:β 2 ( D )<β 2 ( 0 。
「ソーラー」シリコンの非照射結晶では、4角のピラミッド型エッチングピットに対応する既存の欠陥が、転位運動のストッパーの役割を果たします。照射によって生成された追加の欠陥は、既存の表面欠陥が集中している背景では重要な役割を果たしませんでした。
放射線欠陥での散乱が増加するため、放射線への曝露中に穴の移動度がわずかに低下します:μ p ( D )<μ p ( 0 )。このメカニズムにより、シリコンの照射サンプルの導電率の実験的に確認された減少を説明することができます。したがって、式(8)および(9)の分析により、主に移動度(μ)を低下させることにより、X線の吸収線量の値が増加した場合の抵抗の増加が確認されます。 p ( D )<μ p ( 0 ))および自由電荷キャリアの濃度-正孔(β 2 ( D )<β 2 ( 0 ))。
固定用量での方程式データを検討すると、次の結論を導き出すことができます。これにより、機械的応力に対する抵抗の上記の実験的依存性が確認されます。
- 1。
電子シリコンの非照射サンプルの抵抗は、圧縮下で増加します(図2)。これは、因子βの著しい成長が原因で発生します 2 機械的応力の作用下で。圧縮中、因子βの変化(成長) 2 機械的応力の増加による穴の移動度の変化(増加)を大幅に上回ります。パラメータβについて 1 、その値はσに依存しません meh 。
したがって、私たちの場合、電子シリコンに基づく非照射結晶の抵抗の増加(圧縮)と負荷の減少(減圧)は、主要なキャリアを引き継ぐ転位の動きによって説明することができます。欠陥の移動、クラスターの凝固、および転位上のクラスターの凝縮[15]を引き起こす力は、弾性変形した結晶格子に現れます。欠陥は、微細孔、ノード間シリコンのクラスター、および不純物としてより大きなクラスターに凝固する一方で、主要なキャリアを捕捉する中心になりつつあります。シリコンの表層に欠陥が蓄積すると、その導電率が低下する傾向があります。対応する成長因子βで表示されます 2 表面抵抗率の式で。
- 2。
電子シリコンの照射サンプルの抵抗は、圧縮するとわずかに変化します(図3a)。これは、因子βの変化(成長)の減少によって引き起こされます 2 、転位運動の妨げによる。言い換えれば、パラメータの相互に競合する変更β 2 およびμ p 電子シリコンの照射されたサンプルの圧縮の下で釣り合っています。
応力の増加と組み合わせた電子シリコン結晶の抵抗の減少(図3b)は、重い穴の縦方向の有効質量の減少[16、17]と、それに対応する圧縮下での移動度の増加によって発生します。これは、対応するモビリティの増加μによって表示されます p 表面抵抗率の式で。
- 3。
太陽シリコンの照射サンプルと非照射サンプルの抵抗は、圧縮下でわずかに減少します(図4)。これらの実験サンプルでは、転位運動プロセスは非常に困難です。さらに、シリコンの中央から表面に移動する追加の欠陥は、ソーラーシリコンの結晶に存在する表面欠陥が高濃度に集中していることを背景に、電流輸送に本質的に寄与しません。放射線の作用により、ソーラーシリコンの結晶の表面欠陥の濃度がさらに増加します。したがって、パラメータの相互に競合する変更β 2 およびμ p 太陽シリコンの照射サンプルと非照射サンプルの圧縮に見合ったものです。
放射線の影響(図4b)は、ソーラーシリコンの結晶の表面欠陥の濃度をさらに高めます。したがって、ゲッタリングのために移動している追加の欠陥は、照射されていない結晶の場合よりも電流輸送にわずかに寄与します。
結論
機械的負荷の際には、p-Si結晶の抵抗に影響を与える2つの主な要因を考慮する必要があります。第一の要因は、主要なキャリアを引き継ぐ転位運動の過程により、負荷の増加(圧縮)による抵抗の増加と負荷の減少(アンクラスピング)による抵抗の減少です。 2番目の要因は、正孔の有効質量の減少とそれに対応する移動度の増加による負荷の増加に伴うシリコン結晶の抵抗の減少です。
X線照射により、シリコンに空孔と格子間原子が生成され、転位の移動のストッパーとして機能します。放射線欠陥の散乱が増加するため、X線照射中の正孔の移動度はわずかに低下します。太陽シリコンの非照射結晶では、既存の欠陥が転位の移動のストッパーの役割を果たします。
事前に照射された実験用p-Si結晶(電子および「ソーラーベース」シリコン)は、一軸圧縮(応力供給速度8μ/分)の影響下で、抵抗率(±0.2%)をわずかに変化させる特性があります。ストリームに沿った弾性変形[\(11 \ overline {2} \)]。
事前に照射された電子p-Siサンプルでは、抵抗の単軸機械的応力への依存性は、圧縮率に大きく依存します。低速の応力供給(8μm/分)では、機械的応力の増加に伴って抵抗が増加します。高速(32μm/分)では、減少します。ソーラーp型シリコンをベースにした結晶の場合、機械的負荷の下での抵抗の依存性は、圧縮率とは無関係です。
略語
- ρ (σ ):
-
変形方向に沿った誘導機械伝導率の変化
ナノマテリアル