


人間の動きのエネルギーハーベスティングおよびセルフパワーの生体力学的追跡のための高度に伸縮性のある全ゴムベースのスレッド形状のウェアラブル電子機器
要約
伸縮性のあるスマートエレクトロニクスの開発は、人間の動きのエネルギー収集システムやセルフパワーの生体力学的追跡技術への応用の可能性があるため、大きな注目を集めています。ここでは、伸縮性のある導電性スレッド(SCT)として銀コーティングされたガラスミクロスフェア/シリコーンゴムとシリコンラバーコーティングされたSCT(SSCT)で構成される、新しく伸縮性のある全ゴムベースのスレッド形状の摩擦電気ナノ発電機(TENG)を紹介します。他の摩擦電気スレッド。伸縮性のある全ゴムベースのねじ形TENG(SATT)は、100%のひずみの下で3.82 Vの開回路電圧と65.8nAの短絡電流を生成し、さまざまな指の動きの状態に応答できます。さらに、SCTユニットとSSCTユニットで織られたセルフパワードスマートテキスタイル(SPST)には、ストレッチリリースモードと接触分離モードの2種類の動作メカニズムがあります。編みユニット間の伸縮と解放の相互作用により、8.1 Vの開回路電圧と0.42μAの短絡電流が生成され、綿とSPST外の2種類の材料の間で接触分離モードが発生し、150Vのピーク電圧と2.45μAのピーク電流。有望なアプリケーションを証明するために、SPSTデバイスは、商用電子機器に電気エネルギーを提供し、人間の関節の動きからフルレンジの生体力学的エネルギーを効果的に除去することができます。したがって、この作業は、発電およびセルフパワートラッキング用の伸縮性ウェアラブル電子機器のアプリケーションにおける新しいアプローチを提供します。
はじめに
テキスタイルや衣服に統合された快適性、柔らかさ、通気性を備えたウェアラブルエレクトロニクスは、生物医学モニター[1,2,3]、バイオニックロボット[4,5,6]、人間と対話するインターフェース[4,5,6]などの多くの分野で広く使用されています。 7、8]、軍用および家庭用電化製品[9,10,11]は、テクノロジーのブームの進歩の完璧な具現化であり、私たちの生活に多くの便利さと利点をもたらします。ただし、これらのウェアラブル電子機器に電力を供給するために、従来のバッテリーとスーパーキャパシターは、構造的剛性、制限された寿命、余分なデバイス重量、および環境汚染の技術的ボトルネックのために、エネルギー要件を満たすことが困難です。したがって、ウェアラブル電子機器用の新たに持続可能な電源を模索することは緊急の問題です。ウェアラブルアプリケーションの場合、人間の動きの機械的エネルギーは遍在し、比較的安定しており、動作中のウェアラブル電子機器によって電気に変換され、持続可能なセルフパワーの多機能電子デバイスに発展すると予想されます[12、13]。したがって、これは、人間の動きの機械的エネルギーハーベスティング技術を使用して、測定された信号を電源信号に変換できるセルフパワーのウェアラブルデバイスを実現するための有望な方法です。
さまざまなアプローチの中で、摩擦電気帯電と静電誘導に基づく摩擦電気ナノ発電機(TENG)[14,15,16,17]は、人間の動きの機械的エネルギーを効率的に除去できます。これは、軽量であるため、持続可能な電力またはセルフパワーセンサーと見なされます。 、費用対効果、高効率、堅牢性、および材料の幅広い選択。最近、セルフパワーのウェアラブル電子機器として機能する糸状のTENGを開発することで、体の動きの検出、皮膚の触覚の感知、パルス周波数のテストなど、人間の生理学的信号を監視するメリットが実証されました。 -人体の関節の動きを検出および識別するための波状構造設計[18];ただし、センサーの伸縮性は、大きなひずみを伴う複雑な手足の動きにおける重大なハードルです。さらに、糸状のTENGで構成されたスマートテキスタイルエレクトロニクスは、衣服と簡単に統合できるため、人間の動きのエネルギー収集システムでその利点を示しています。 Wangらは、ウェアラブルスマートテキスタイルを衣服に縫い付けてパワークロスにするか[19]、適切に設計された織り糸法に基づいてTENGテキスタイルを実現しました[20]。ただし、安定した高出力性能は、実際のアプリケーションにとって依然として困難な問題です。さらに、以前のウェアラブル電子機器のほとんどの伸縮性電極は、曲がりくねった金属箔[21、22]、事前に歪んだ柔らかい基板への堆積[23、24]、および金属ナノワイヤ[25]によって実現され、スマートテキスタイル電子機器が着用使用に耐えることを妨げていますと大規模な製造。
ここでは、上記の問題に対処するために、SCTネジとして「銀被覆ガラス微小球/シリコーンゴム」とSSCTとして「シリコーンゴム被覆SCT」からなる二重らせん構造の新しいタイプのSATTを紹介します。糸。超伸縮性エラストマーマトリックス材料の良好な適合性により、SATTは100%の高い伸縮性を容易に得ることができ、伸縮性電子システムでのコンフォーマルアセンブリを実現します。長さ5cmのSATTは、3.82Vの出力電圧と65.8nAの出力電流を生成します。これは、指の動きの状態を追跡するためのアクティブなウェアラブルセンサーとして機能する可能性があります。さらに、SCTおよびSSCTユニットによって織り込まれたSPSTは、ストレッチリリースモードで8.1 Vの出力電圧と0.42μAの電流を生成し、最大電力は接触分離モードで最大163.3μWに達する可能性があります。したがって、SPSTは、商用電子機器に電気エネルギーを供給して通常の動作状態を維持すると同時に、人間の関節の動きからフルレンジの生体力学的エネルギーを効果的に収集でき、実用的な伸縮性およびウェアラブルエネルギーハーベスターの開発を促進するための大きな重要性を提供します。
メソッド
SCTの作成
銀でコーティングされたガラスミクロスフェア(Shenzhen Xiate Science and Technology Co. Ltd.、中国)を、3:1の重量比で1.5時間、固体シリコーンゴムマトリックス(TN-920)に均一に分散させました。次に、混合物をスクリュー押出機に入れて、110℃での押出および加硫プロセスを達成し、直径1mmの導電性複合糸を得た。伸縮性のある5本の導電性スレッドを選択してコイル状にし、両端を混合シリコーンゴム(Ecoflex 00-30)と硬化剤で質量比1:1でコーティングしました。最後に、それを真空乾燥オーブンに入れ、20分間排気し、80°Cで2時間加熱しました。硬化と成形の後、SCTは伸縮性のある複合電極として実現できます。
SSCTの作成
SCTを直径4mmの型に入れました。次に、シリコーンゴム(Ecoflex 00-30)と硬化剤の混合物を型に注入しました。排気と加熱の後、SSCTは離型技術によって準備されました。
測定システム
サンプルは、電界放出走査型電子顕微鏡(ZEISS EVO18、Carl Zeiss Jena、ドイツ)によって特徴づけられました。出力電圧および電流性能は、KEITHLEY2611Bシステム電位計によって記録されました。
結果と考察
SATTは、2つのダブルヘリックスオールラバーベースのスレッドで構成されています。1つは、シリコーンゴムマトリックスに均一に分散された銀コーティングガラスミクロスフェアを使用するSCTで、もう1つはシリコーンゴムコーティングSCTを使用するSSCTです。 SATTの詳細な製造プロセスを図1aに示します。銀でコーティングされたガラス微小球(75 wt%)は、混合プロセスによって超弾性シリコーンゴムにブレンドされ、その後、スクリュー押出機で押出され、加硫されて、導電性複合糸が得られました(図1aI)。次に、SCT電極として使用するために、5つの伸縮性のある導電性スレッドを選択し、スレッドの端を結び、その後の製造時にねじれが解けないようにしました(図1a(II))。電子を獲得する強力な能力を考慮して、電極をカプセル化するための包装材料として、優れた機械的特性を備えたシリコーンゴムが慎重に選択されました。つまり、SSCTが作成され、他の摩擦電気スレッドと見なされました(図1a(III))。最後に、SCTとSSCTを互いに絡み合わせて、伸縮性があり、耐摩耗性があり、低コストの二重らせん構造の全ゴムベースの糸状TENGを形成しました(図1a(IV))。 SSCTの断面走査型電子顕微鏡(SEM)画像を図1bに示します。 5本の導電性スレッドがシリコーンゴムでしっかりとコーティングされており、内部の導電性スレッドで発生するより多くの誘導電荷を目的としたオールインワン構造を実現していることは明らかです。図1c、dに示すように、直径の異なる銀被覆ガラス微小球はシリコーンゴムに密接に埋め込まれており、ゴム状マトリックスに3次元の導電性ネットワーク構造が現れる可能性があります。その結果、SCTは優れた導電性と非常に伸縮性のある能力を備えています。均質な有機マトリックスの良好な適合性をさらに実証するために、SCTとコーティングされたシリコーンゴムの間の接続位置で拡大されたSEM画像を図1e、fに示します。どうやら、導電性の糸とコーティングされたシリコーンゴムの間に隙間がないので、それらはうまく設計された統合された構造で実装されています。図1gは、ダブルヘリックス環境発電スレッドを使用して得られたSATTを示しています。図1gの下の画像は、SATTの伸縮性を示しています。この結果は、スレッド形状のTENGを最大約100%まで伸ばすことができることを示しています。これは、スレッドベースのTENGに関する以前のレポート[26,27,28]よりも圧倒的に優れています。
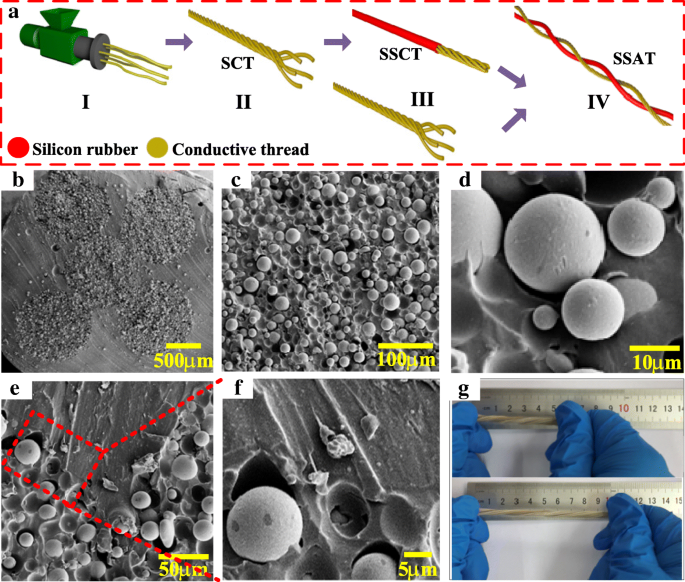
a SATT装置の製造工程の概略図。 b – d さまざまな倍率でのSSCT断面図のSEM画像。 e 、 f さまざまな倍率でのSCTとコーティングされたシリコーンゴム間の接続位置のSEM画像。 g 準備されたSATTの写真と約100%のひずみで引き伸ばされていることのデモンストレーション。
複雑な二重らせん構造で製造されているにもかかわらず、SATTは、エッジ効果を考慮せずに並列に接続された多数のコンデンサとして概算できます。したがって、SATTの動作メカニズムは、伸縮解放サイクルにおけるSCTとSSCTの間の典型的な接触分離プロセスに単純化することができます。接触帯電と静電誘導の結合効果に基づくSATTの発電メカニズムを図2aに示します。元の状態では、シリコーンゴムの表面は負の電荷を帯びていますが、接触帯電により、電極にはそれぞれ同等の正の電荷が発生します。 SATTに引張応力がかかると、シリコーン表面と電極間の距離が大きくなり、電位差が生じます。電子は外部回路を通って2つの電極間を流れ、電流が形成されます。距離がかなり遠くなるまで、電子の平衡状態が転送を停止します。引張応力が解放されると、電子は電極間を逆方向に流れ、電荷バランスを実現します。 SATTが完全に元の状態に復元された後、電荷は再び完全に中和されます。したがって、SATTは、連続的なストレッチ解放周期運動で出力電気エネルギーを生成する可能性があります。
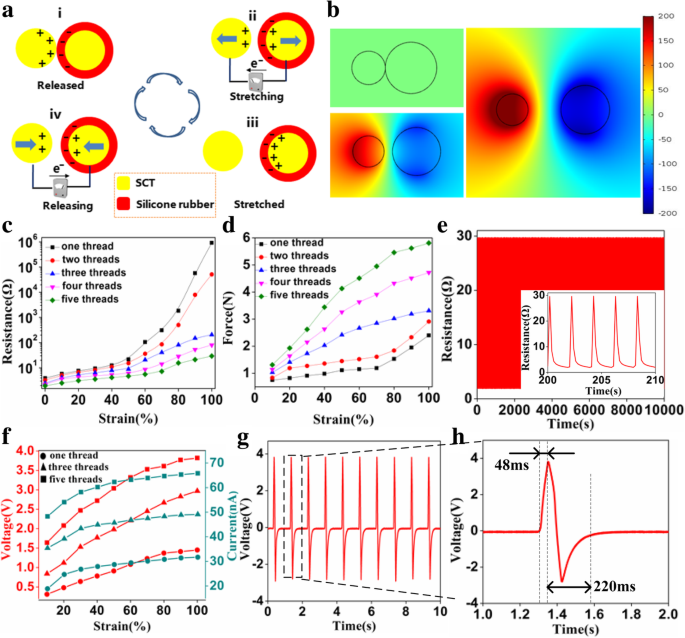
a ストレッチリリースプロセスでのSATTの生成メカニズム。 b COMSOLソフトウェアを使用した潜在的な分布のシミュレーション結果。 c さまざまなひずみマウントでの長さ5cmの導電性スレッドの抵抗。 d ひずみ量の関数として、さまざまな数の導電性スレッドが受ける引張力。 e 100%ひずみ内でのSCTの引張耐久性試験。 f さまざまなひずみマウントでの導電性スレッドの出力電圧と電流。 g 100%ひずみで長さ5cmのSATTの開回路電圧。 h パネル g の黒い破線のボックスで示された領域の拡大図
さらに、COMSOLソフトウェアに基づく有限要素法(FEM)シミュレーションを確立し、SATTの動作メカニズムを定量的に分析します。このモデルでは、±1μC/ m 2 の2つの摩擦電荷密度 ねじ面に割り当てられます。スレッド表面の初期電荷の量は、計算された電位にのみ影響することに注意してください。ただし、電位の相対的な変化傾向は不変です。図2bは、さまざまな引張力でのSATTの電位分布を示しています。外部の伸ばされた力が存在しない場合、デバイス全体の電位差はほぼゼロになります。 SATTが外側に伸びると、正と負の摩擦電荷が分離され、電位差が大きくなります。したがって、COMSOLソフトウェアによるシミュレーション結果は、上記の作業メカニズムの理論的分析プロセスと一致していることが明らかです。
快適に伸縮可能な電極の場合、導電率は十分に重要な要素です。シリコーンゴムエラストマーに分散された銀被覆ガラスミクロスフェアを備えた提案された伸縮性のある糸状電極は、異なるひずみで引き伸ばされて、様々な導電率を引き起こす。導電性スレッドの数、ストレッチの長さ、および電極の抵抗の間の関係を体系的に研究する必要があります。図2cは、さまざまなひずみマウントでの長さ5 cmの1〜5本の導電性スレッドの抵抗を示しています。 50%のひずみの範囲内で、導電性スレッドの数が異なる電極の抵抗は、伸長および解放プロセスの下でほとんど変化しません。ただし、ひずみ量が大きくなると、導電性スレッドの数が増えるほど、電極の抵抗値が低くなります。図2dは、ひずみ量の関数として、さまざまな数の導電性スレッドが受ける引張力を示しています。明らかに、導電性スレッドの数が増えると、引張力は大きくなります。引張力による刺激を受けやすいことを考慮して、この作業では5本の絡み合った導電性スレッドをSCT電極として選択します。図2eに示すように、100%ひずみ内でのSCTの引張耐久性が実行されました。結果は、SCTが特に非常に安定した可逆性を示す優れた導電性エラストマーであることを示しています。さらに、図2fに示すように、二重らせん環境発電スレッドの電気出力性能が実行されました。導電性スレッドの数が増えると、電極とシリコーンゴムの間の接触領域が拡大し、その結果、伸縮-解放運動の下で摩擦電気スレッド間でより多くの電荷が移動します。したがって、出力開回路電圧と短絡電流の両方が増加します。図2gは、長さ5 cmのSATTが、100%のひずみで3.82Vの開回路電圧と65.8nAの短絡電流を生成できることを示しています。 1つの電圧サイクルの拡大図を図2hに示します。 SCTとSSCTで構成されるSATTの応答時間と回復時間は、1Hzでそれぞれ48msと220msであることに注意してください。したがって、SATTは、人間の生理学的信号を監視するためのセルフパワーの引張検知電子機器として使用されることが期待されています。
人間の動きによる力学的エネルギーは、普遍性、再生可能性、安定性などのさまざまな利点があるため、頻繁に使用されるエネルギー資源です。人間の動きから機械的エネルギーを収集するスマートテキスタイルとインテリジェントウェアが広く研究されています[29、30、31]。しかし、優れた伸縮性がないため、柔軟なストリップをベースにしたスマートテキスタイルの快適さは、インテリジェントファブリックの開発を妨げる非常に重要な要素です。 SATTデバイスの優れた伸縮性を考慮して、軽量で快適、そしてウェアラブルなセルフパワーテキスタイルがここで提案されています。 SCTおよびSSCTユニットは、従来の平織りでSPSTに織り込まれました。 SPSTデバイスの概略図と写真(5×7 cm 2 )を図3a、bに示します。生物学的運動は通常5〜30%のひずみで伸長すると見なされることに注意してください。これには、機械的張力下での長期安定動作を保証するために、ウェアラブル電子機器のはるかに高いひずみ適合性が必要です[32、33、34]。図3cは、リニアモーターを使用したSPSTデバイスの意図的に伸ばされた100%ひずみの伸展概略グラフを示しています。 SPSTの伸縮解除動作メカニズムはSATTのメカニズムと同じであり、すべてのSTC端子をテストポートとして接続し、SSTCの電極を他のテストポートとして接続することに重点が置かれています。 SPSTデバイスの開回路電圧と短絡電流は、伸縮-解放励起の過程でそれぞれ約8.1 Vと0.42μAです(図3d、e)。高い伸縮性と安定した出力性能により、SPSTは、人間の関節の伸縮運動エネルギーを除去するためのセルフパワーの監視デバイスとして機能することができます。
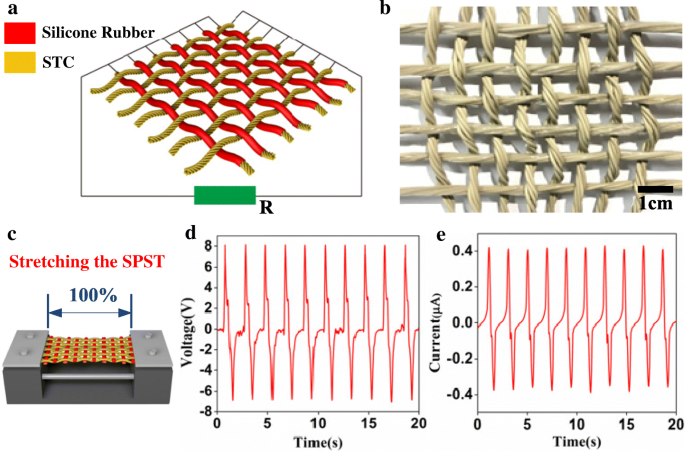
a SPSTの概略図。 b SPSTの写真画像。 c 100%ひずみでのSPSTの伸縮概略グラフ。 d 出力電圧と e 周期的な伸縮-解放サイクルでのSPSTの出力電流
さらに、SPSTデバイスが実際の人間の動きの間に他の衣類生地との接触分離プロセスに見えることを考慮して、リニアモーターの定期的なタッピングプロセスでSPST-綿タッピングによる出力性能が達成されました(図4a)。 SPST-綿タッピングによる発電メカニズムを図4bに示します。定期的なタッピングサイクルでは、綿とSPST外の2種類の素材の間で接触分離モードが発生します。したがって、静電誘導電荷は、SPSTの電極間を流れます。図4c、dは、100 Nの力での開回路電圧と短絡電流を示しています。驚くべきことに、SPSTの開回路電圧は、動作周波数に依存しないさまざまなタッピング周波数で約150Vです。ただし、SPSTの短絡電流は約0.96、1.31、1.55、1.77、および2.45μAで、周波数はそれぞれ0.5、1、1.5、2、および3Hzです。これは、周波数が高くなるほど接触分離の時間が短くなり、電荷の数が同じになると電流が大きくなるためです(Isc =dQsc / dt)。さらに、エネルギー供給装置として機能するSPSTは、通常、実際のアプリケーションでは外部負荷に接続します。追加ファイル1:図S1は、1MΩから1GΩまでの外部負荷抵抗の関数としての出力電圧を示しています。出力電力はU 2 で定義されるため、さまざまなレベルの外部負荷に接続されたSPSTの出力電力を取得できます。 / R。明らかに、出力電力は最初は増加し、次に減少し、外部負荷抵抗が約120MΩのときに最大値の163.3μWに達します。さらに、追加ファイル1:図S2に示すように、SPSTの安定性テストは10,000サイクルで実施されました。明らかに、SPSTの出力電圧は定期的なテストサイクルで低下しなかったため、SPSTの寿命は非常に長くなっています。 SPSTコットンタッピングで生成された電力をコンデンサに蓄え、ウェアラブル電子機器に電力を供給することができます。図4eは、周波数3Hzおよび力100Nでのさまざまな容量の充電曲線を示しています。0.47μFのコンデンサの電圧は、150秒間で14Vまで充電できます。コンデンサの容量が増えると、同じ高電圧に到達するのに時間がかかります。卓越した出力性能により、SPST綿デバイスはLEDを直接オンにし、コンデンサーに蓄えられた電気エネルギーによって商用電気時計に電力を供給することができます(図4fおよび追加ファイル2:ビデオS1、S2)。これらの結果は、SPSTデバイスが商用電子機器に電気エネルギーを供給して通常の動作を維持できることを示しています。
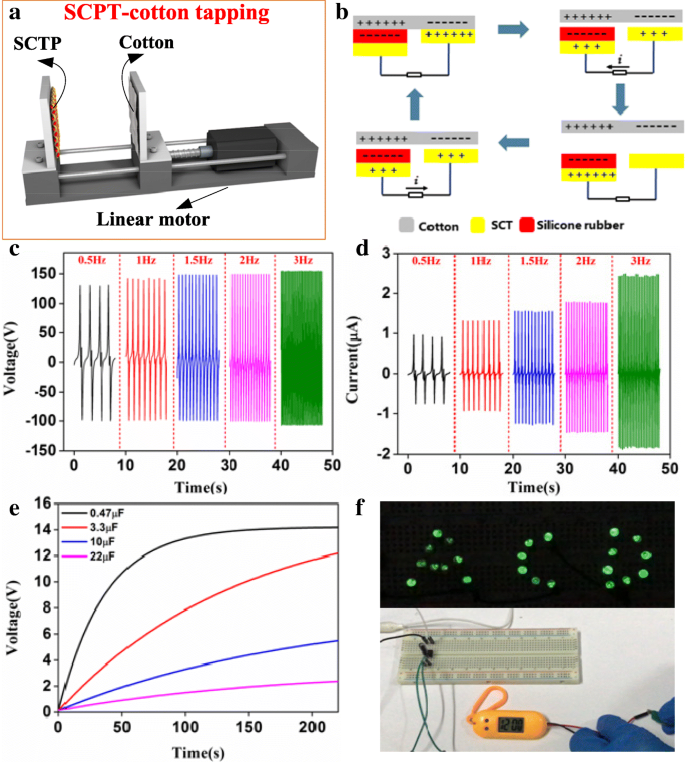
a SPST-綿タッピングの概略図。 b SPST綿タッピングによる発電機構。 c 開回路電圧と d 異なるタッピング周波数でのSPST-綿タッピングによる短絡電流。 e 周波数3Hz、力100Nでのさまざまなコンデンサの測定電圧曲線。 f LEDと電気時計はSPST綿のデバイスによって駆動されました
伸縮性があり、体のほとんどの部分で簡単に組み立てられるため、糸状のTENGは、体の動きを検出するためのアクティブなウェアラブル電子デバイスとして機能します。図5aおよび追加ファイル2:ビデオS3に示すように、SATTデバイスは、5つの曲げ解放動作状態に応答するように、被験者の人差し指に固定されました。明らかに、出力電圧のピークは、運動振幅の拡大とともに増加します。つまり、出力監視信号は、ストレッチ運動の大きさによって決定されます。この動作により、SATTを外部電源なしでセルフパワーのアクティブセンサーとして使用して、指の動きの状態を定量的に特徴付けることができることが確認されます。さらに、SCTおよびSSCTユニットによって織り込まれたSPSTの開回路電圧は安定しており、動作周波数に依存しません。これは、モーションモニタリングの出力信号として使用できます。図5b、cに示すように、SPSTを人体の関節に固定して、環境発電と状態監視を実行しました。肘と膝からの屈曲と伸展の動作が現れると、SPSTのストレッチリリースモードとSPSTコットンの接触分離モードが生成され、交互の電気信号が生成されます。明らかに、SPSTデバイスはスマートテキスタイルの弾性特性に関する要件を十分に満たし、出力電圧は肘関節と膝関節の最大曲げ角度でそれぞれ約105Vと116.9Vに達する可能性があります。応答出力電流はそれぞれ約0.73μAと0.89μAです。その結果、慎重に設計されたSPSTは、身体の関節の運動エネルギーを除去することにより、ウェアラブルエレクトロニクスに有望な電源供給方法を提供し、患者のリハビリトレーニングや追跡活動のアプリケーションで非常に重要な役割を果たします。
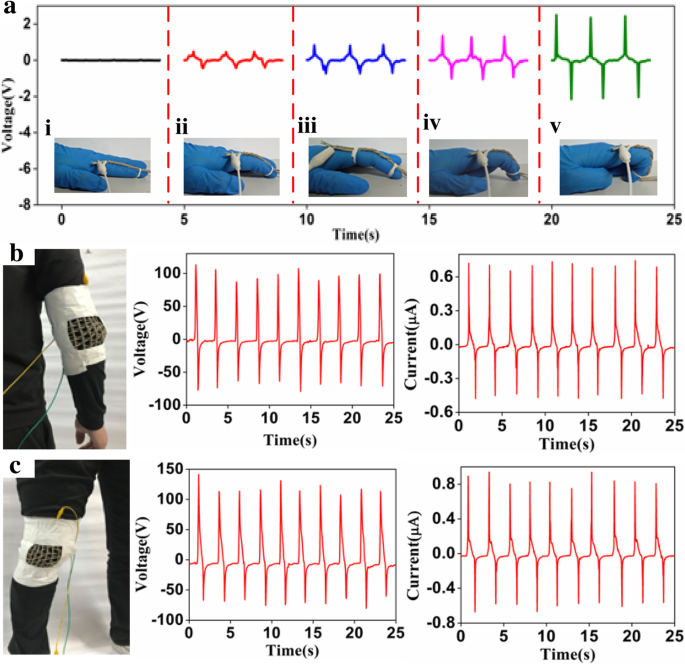
a 指の動きの状態を検出するためのセルフパワーアクティブセンサーとしてのSATT。 b SPSTは肘に固定されています c エネルギーハーベスティングと状態監視を実行するための膝
結論
要約すると、この論文は、銀被覆ガラス微小球とシリコーンゴムを原料として使用することにより、新しく設計された伸縮性のある全ゴムベースの糸状のウェアラブル電子機器を示しています。 100%ひずみのSATTは、静電効果を介して引張力学的エネルギーを電気エネルギーに変換でき、指の関節の動きを定量的に追跡するセルフパワーセンサーとして実証されています。さらに、SCTおよびSSCT摩擦電気スレッドは、従来の平織りでSPSTに織り込まれ、編みユニット間の伸縮と解放の相互作用と最大出力電力により、8.1Vの開回路電圧と0.42μAの短絡電流を生成します。 SPSTコットンタッピング方式で120MΩの外部負荷抵抗で163.3μW。安定した大きな出力電圧性能により、SPSTは商用電子機器に電気エネルギーを供給するための効果的な電源として認識されていました。 SPSTは伸縮性とウェアラブル性を備えているため、人間の関節の動きから生体力学的エネルギーを収集するための効果的なソリューションを提供し、医療システムやセルフパワーのスマートトラッキングテクノロジーのアプリケーションで大きな可能性を発揮することが期待されます。
データと資料の可用性
この調査中に生成または分析されたすべてのデータは、この公開された記事とその補足情報ファイルに含まれています。
略語
- SATT:
-
伸縮性のある全ゴムベースの糸状TENG
- SCT:
-
伸縮性のある導電性スレッド
- SEM:
-
走査型電子顕微鏡。
- SPST:
-
セルフパワーのスマートテキスタイル
- SSCT:
-
シリコーンゴムでコーティングされたSCT
- TENG:
-
摩擦電気ナノ発電機
ナノマテリアル
- Future Electronics:熱画像およびIRセンシングのための迅速な開発プラットフォーム
- ドラッグデリバリーを強化するためのナノファイバーとフィラメント
- 癌治療のためのナノ粒子:現在の進歩と課題
- フルアングルマイクロLED用の高反射薄膜最適化
- 小型化された伸縮性のある高レートのリニアスーパーキャパシタ
- 非常に効果的な標的膵臓腫瘍治療のための、血液循環が延長され、生体適合性が改善されたレスベラトロール負荷アルブミンナノ粒子
- 赤外線ステルス用途向けの伸縮性の高いマイクロ/ナノリンクル構造
- 健康と環境の監視のためのウェアラブルガスセンサー
- 自律技術のための3Dモーショントラッキングシステム
- 制御用の接続:位置およびモーションセンサー用の通信インターフェース
- デバイスは、人間の動きを通じてウェアラブルセンサーに電力を供給します