


効果的なモーションエネルギーハーベスティングのためのコアシェルファイバーベースの2D織摩擦電気ナノ発電機
要約
個人用電子機器は、小型化、機能性、装着性などの一般的な開発傾向があります。ワイヤレスで持続可能で独立した運用は非常に重要であり、周囲の環境エネルギーを収集できる新しい電力技術が求められます。ここでは、繊維製造における撚りと織りのプロセスを経てコアシェル繊維で構成された新しい種類の2D織りウェアラブル摩擦電気ナノ発電機(2DW-WTNG)を報告します。 2DW-WTNGは、575nAの出力電流と6.35Vの出力電圧で体の運動エネルギーを電気に変換できます。50MΩの外部負荷で、2.33 mW / m 2の最大電力密度を生成しました。 。電気は、任意の面内方向に駆動される2DW-WTNGから生成できます。 0.4mmの小さな変位で2DW-WTNGを駆動できます。これにより、人間の小さな動きからエネルギーを収集する能力が検証されました。堅牢な2DW-WTNGは、明らかなパフォーマンスの低下なしに12時間継続して動作できます。
はじめに
電子技術の急速な発展に伴い、私たちの日常生活をより良くするために、さまざまなポータブル、ウェアラブル、さらには埋め込み型のパーソナル電子デバイスが発明されました[1,2,3,4,5,6,7,8,9,10、 11]。それにもかかわらず、容量の制限、寿命の短さ、メンテナンスの難しさ、環境の危険性など、従来のバッテリーに固有の制限があるため[12、13、14]、個人用電子機器の生産量の増加と幅広い用途により、新しい電源が急務となっています。 [15、16、17、18、19]。電子機器が持続可能かつタイムリーに機能することを可能にする新しい電源を開発することが緊急に必要とされています。人間の日常活動からの体の動きのエネルギーは、あなたが何をし、どこにいても広く存在します[20]。そのような機械的エネルギーを効果的に収集して電気に変換できれば、いつでもどこでも必要なときに個人の電子機器に電力を供給することができます。
機械的エネルギーを電気に変換する新しいタイプの発電装置として[21,22,23,24]、摩擦電気ナノ発電機は、接触帯電効果と静電誘導の結合に基づいています[25,26,27,28、 29,30]。それらは、携帯用電子機器、センサー、環境モニターなどの持続可能な電源として成功裏に実証されています[31、32、33、34、35、36、37、38、39、40、41、42、43、44] 。その中で、ウェアラブル摩擦電気ナノ発電機(WTNG)は、人間の活動からの体の運動エネルギーを電気に変換するように設計されています[45、46、47]。現在のWTNGは、基板を使用するかどうかによって2つのカテゴリに分類できます。ほとんどのWTNGは最初のカテゴリに属し、電極と摩擦層が繊維や布地などの柔軟な基板にコーティングされています[48、49、50、51、52、53]。柔らかさ、柔軟性、軽量性に優れています。それにもかかわらず、負荷のかかった電極と基板の間の接着性が低く、耐久性と使いやすさが大幅に低下し、さらにこれらのWTNGを長期間使用できなくなります。 WTNGの2番目のカテゴリは、余分な基板に依存せず、それらの建築材料は、電極との摩擦層として直接使用されます。ナイロンクロスとポリエステルクロスをベースにしたWTNGは、基材からの接着の問題を巧みに回避しました[54]。その後、電極にステンレス鋼の導電性糸、摩擦層材料にシリコンゴムとPDMSを使用した一種のWTNGが開発されました[55,56,57]。ただし、これらのWTNGは、長期的な堅牢性を備えていないか、大規模な製造に使用できる非常に複雑な製造プロセスを備えています。
この作業では、大規模生産に適した堅牢性と連続生産プロセスのメリットを備えた、新しい種類の2Dウェアラブル摩擦電気ナノ発電機(2DW-WTNG)を製造しました。サイズが1.5×1.5cm 2 の2DW-WTNG それぞれ6.35Vと575nAの出力電圧と出力電流を生成しました。 50MΩの外部負荷に接続すると、2.33 mW / m 2 の最大電力密度が生成されます。 。 2DW-WTNGは、整流ブリッジに接続された後、エネルギー貯蔵プロセスなしで、商用発光ダイオード(LED)に瞬時に電力を供給しました。また、0.47mFのコンデンサを1分で0Vから1.84Vまで充電するためにも使用されました。さらに、変位0.4mmまでの外部運動に対する優れた感度、任意の面内方向に沿ってさまざまな動作モードで動作するための優れた適応性、および劣化することなく12時間連続して動作するための優れた堅牢性を示しました。
メソッド
ナイロン/銅コア-シェル複合導電性繊維およびポリエステル/スチールコア-シェル複合導電性繊維の製造
ナイロン/銅複合繊維の原料は、毎日縫製するナイロン糸(直径110μm)とエナメル銅線(直径60μm)です。ポリエステル/鋼複合繊維の原料は、毎日縫製するポリエステル糸(直径200μm)と鋼線(直径60μm)です。図1に示すように、自家製の回転支持体を使用して2種類のポリマー/金属複合繊維を作成しました。ナイロン/銅複合繊維の準備では、エナメル銅線を最初に回転支持体の中央に固定し、次に2本を固定しました。回転サポートの両端にナイロン糸を固定しました。次に、これらの3本のワイヤーの上部を一緒に保持して吊るしました。最後に、回転支持体から始めて、ナイロン糸を撚り合わせて中央の銅線に巻き付け、コアシェル構造(直径380μm)のナイロン/銅複合繊維を形成しました。ポリエステル/鋼複合繊維の調製は、ナイロン/銅複合繊維の準備と同様であり、エナメル銅線が鋼線に置き換えられ、ナイロン糸がポリエステル糸に置き換えられた。コアシェル構造は、ポリエステル糸(直径385μm)でしっかりとコーティングされた鋼線で実現されました。ここでは、2D-WTNGの安定性と出力性能のバランスをとるために、さまざまな金属線が選択されました。鋼と比較して、銅線は薄い絶縁層で覆われていました。これは、2D-WTNGの作業プロセス中の短絡を回避するために使用されました。両方のファイバのコア電極として鋼を選択した場合、長時間の作業後に摩擦や摩耗が発生し、正極と負極の間で短絡が発生する可能性があります。これにより、2D-WTNGの安定性が低下します。両方のファイバのコア電極として銅を選択した場合、銅線の表面の絶縁層によって静電誘導効果が弱まり、2D-WTNGの性能が低下します。ポリマー/金属複合繊維のこの準備プロセスは、手でねじる糸の簡単なツールであるツイストトゥオのモデルを模倣しています。この方法を使用すると、ポリマー/金属複合繊維を工場で撚り機を使用して大量生産することができます。
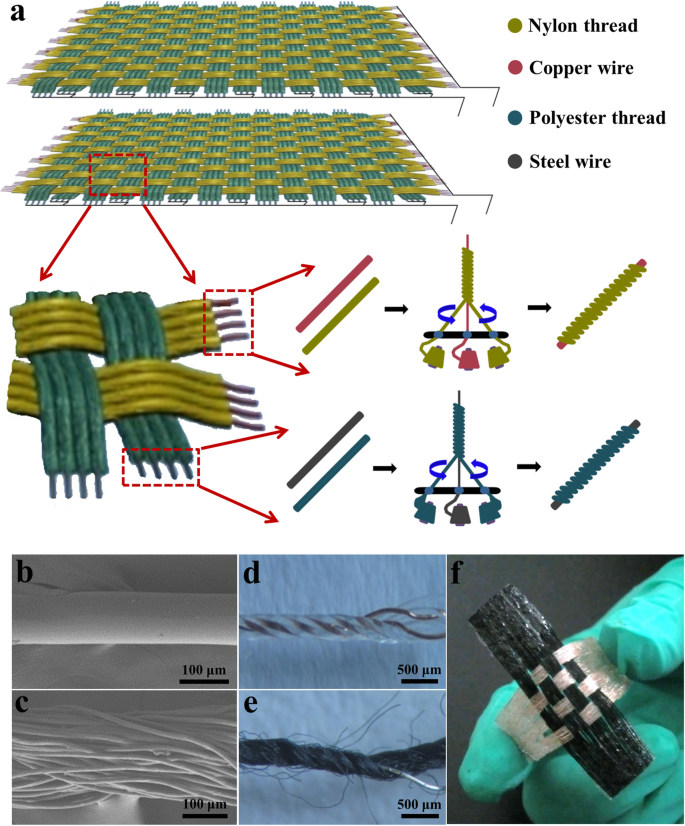
2DW-WTNGの製造と構造。 a 製造プロセスを示す概略図。ナイロン糸のSEM画像( b )とポリエステル糸( c )、 それぞれ。ナイロン糸でコーティングされた銅線の光学画像( d )およびポリエステル糸でコーティングされた鋼線( e )、 それぞれ。 f 2DW-WTNGの光学画像
2DW-WTNGの作成
調製されたナイロン/銅複合導電性繊維およびポリエステル/鋼複合導電性繊維は、一般的な編み技術によって布に統合された。 9本のナイロン/銅複合繊維を1つのグループとして並べ、9本のポリエステル/鋼複合繊維を1つのグループとして並べました。ナイロン/銅複合繊維の2つのグループとポリエステル/鋼複合繊維の2つのグループが2D織り構造でWTNGに編まれました。 2DW-WTNGの上部と下部のサイズは、それぞれ15mm×15mm(36本の複合繊維で構成)と38mm×38mm(90本の複合繊維で構成)です。図1に示すように、それらの格子幅は約7mmでした。ここで、格子幅は、複合繊維の直径と1つのグループで使用される複合繊維の数によって決まります。したがって、格子幅は、1つのグループの複合繊維数を増減することによって便利に調整できます。この織りプロセスは、大量生産が必要な場合、工場の織機で行うことができます。
2DW-WTNGの測定
有効サイズが15mm×15mm、グレーティング幅が7mmの2DW-WTNGを、定期的に前後に動かしてテストしました。測定では、下部の2DW-WTNGを実験台にしっかりと取り付けられた機械式ステージに固定し、上部の2DW-WTNGを下部の2DW-WTNGの上に置き、リニアモーターに接続しました。上部の2DW-WTNGは、スライド変位と速度が制御されたリニアモーターによって駆動され、デバイスの表面に平行な方向で下部の範囲で往復線形運動を行い、有効接触面積を常に変化させません。 。
結果と考察
繊維製造で撚り技術を使用することにより、中心電極として金属線を使用し、外側の摩擦層としてミシン糸を使用して、コアシェル構造の複合繊維を製造しました。 2DW-WTNGは、2種類のコアシェル構造の複合繊維を直交異方性織りプロセスで織り上げることによってさらに製造されました。図1aは、2つの同じ部品を備えた2DW-WTNGの構造図を示しています。 2DW-WTNGの各部において、一方向に配置されたナイロン/銅複合繊維を一方の電極として収集し、反対方向に配置されたポリエステル/鋼複合繊維をもう一方の電極として収集した。工場で撚り機のように機能する自家製の回転セットアップを使用して、2種類の複合繊維を準備しました。走査型電子顕微鏡(SEM)の画像を図1および2に示します。図1aとcは、それぞれ直径110μmの最初のナイロン糸と直径200μmのポリエステル糸の表面の外観を示しています。図1dとeは、それぞれ準備されたナイロン/銅複合繊維とポリエステル/鋼複合繊維の光学画像であり、コアシェル構造をはっきりと観察できます。図1fは、ナイロン/銅複合繊維の4つのグループとポリエステル/鋼複合繊維の4つのグループで作られた最終的な2DW-WTNGの光学画像を示しています。長さと幅が織り込まれた構造で、一般的な布に似ています。詳細な製造プロセスは、「方法」のセクションに示されています。
2DW-WTNGの発電性能を調べます。図2aに示すように、2DW-WTNGの上部と下部は向かい合って固定されており、上部は下部に対して左右にスライドできます。上部と下部の間で相対的な滑りが発生すると、接触面が互いに擦れ合いました。摩擦電気シリーズによると、ポリエステルはナイロンよりも摩擦電気的に負であるため、電子がナイロンからポリエステルに注入され、ナイロン表面に正の摩擦電荷を生成し、ポリエステル表面に負の電荷を生成します。ステージIに示すように、上部が右にスライドし、接触面がずれた位置にスライドすると、ずれた領域での補償されていない摩擦電荷の結果として正味の電界が発生し、ポリエステルの電極から自由電子が電極に移動します。電界が電極に誘導された電荷によって遮蔽されるまでナイロン。上部が右にスライドし続けると、接触面が整列した位置になり、反対の符号の摩擦電荷が完全にバランスし、誘導された自由電子の逆流につながりました(ステージII)。右方向へのスライドが進むにつれて、接触面はずれた位置に戻され、ステージIIIに示すように、自由電子がポリエステルの電極からナイロンの電極に駆動されました。これにより、2DW-WTNGの発電プロセスのサイクルが完了しました。ナイロン/銅複合繊維とポリエステル/鋼複合繊維の間の相間構造を備えた格子設計の恩恵を受けて、このプロセス中に2つの電極間で電荷が交互に移動します。実験的に、最初の接触状況は、上部と下部の配置方法によって異なります。ただし、2DW-WTNGの出力には影響しません。同じ格子構造のため、最初の接触状況は出力ピーク値に違いはありませんが、出力ピークの方向を変えます。最初の接触状況が正から正の場合、接触状況は最初に正から負になり、次に正から正になり、正の出力ピークが続き、その後に負の出力ピークが続きます。対照的に、最初の接触状況が正から負の場合、接触状況は最初に正から正になり、次に正から負になり、負の出力ピークが続き、その後に正の出力ピークが続きます。
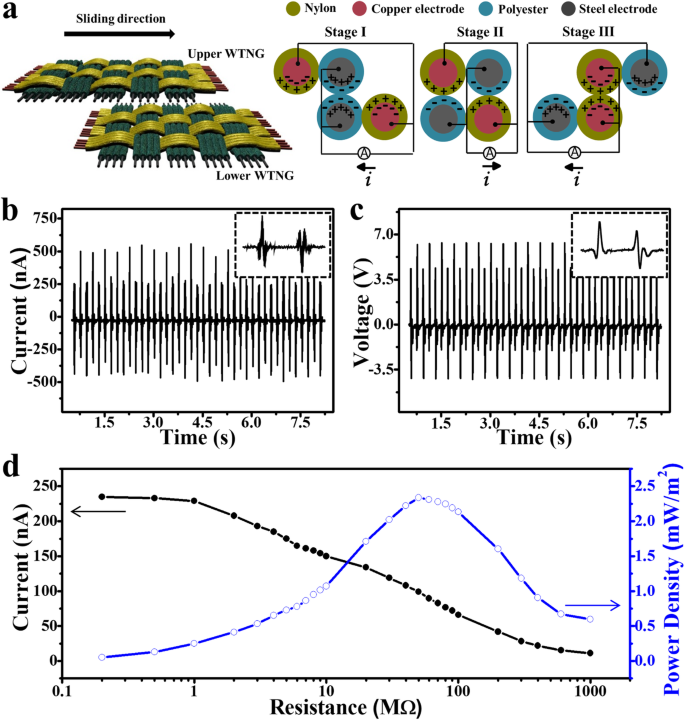
2DW-WTNGの発電特性。 a 発電メカニズムの全体的なプロセス。 b 出力電流と c 2DW-WTNGの出力電圧。 b のインサート および c 出力電流と出力電圧の拡大図です。 d 負荷抵抗が異なる2DW-WTNGの電流(黒丸)と電力密度(白丸)
サイズが15mm×15mm、グレーティング幅が7mmの2DW-WTNGを、定期的に前後に動かしてテストしました。詳細な測定方法は、「方法」のセクションに示されています。 2DW-WTNGは、8mmのスライド変位と0.15m / sのスライド速度で、2.7Hzの一定周波数で最大振幅575nAの連続交流(AC)出力を生成しました(図2b)。出力電圧は、出力電流と同じ周波数で6.3 Vに達しました(図2c)。 1動作サイクルにおける出力電流と出力電圧の拡大図を図1と図2に挿入します。それぞれ2bとc。 1つの作業サイクルには、2つの波束があります。1つは右方向にスライドする一方向を表し、もう1つは左方向にスライドする一方向を表します。そして、各波束には2つの正のパルスと2つの負のパルスがあります。この結果は、図1fに示すように、ナイロン/銅複合繊維の4つのグループとポリエステル/鋼の複合繊維の4つのグループを含むデバイスの構造と一致しています。これにより、スライドモードでの出力がグレーティングと密接に関連していることがさらに確認されます。デバイスの幅と格子番号。
実際の電源として、2DW-WTNGは外部負荷に接続する必要があります。抵抗器を使用して、出力電力の外部負荷への依存性を調査しました。図2dは、瞬間電流と瞬間出力電力密度対外部負荷抵抗を示しています。瞬時出力電力密度は、瞬時出力電力の比率( I )として計算されました。 2 R )およびデバイスの領域。オーム損失による負荷抵抗の増加に伴い、瞬時電流が低下することがわかりました。瞬時出力電力密度は低抵抗で増加し、2.33 mW / m 2 の最大値に達しました。 50MΩの負荷抵抗で、その後、より高い抵抗で減少しました。この結果は、2DW-WTNGが一部の個人用電子機器、特に負荷抵抗が約数十メガオームの機器の電源になる可能性があることを示しています。
スライド駆動モードでの2DW-WTNGの出力性能は、摩擦電荷の分離率に大きく依存します。これを深く研究するために、15mm×15mmのサイズと7mmのグレーティング幅を持つ2DW-WTNGの出力性能は、8mmの所定のスライド変位で異なる相対スライド速度で周期的に移動することによって特徴付けられました。図3aとbは、それぞれ0.025 m / s、0.050 m / s、0.075 m / s、0.100 m / s、0.125 m / sの平均スライド速度での2DW-WTNGの出力電流と出力電圧を示しています。電流曲線と電圧曲線では、一方向移動で320ミリ秒の完全な出力ピークがあり、0.025メートル/秒のスライド速度で逆方向に移動する320ミリ秒で別の出力ピークがあります。同じ作業時間内に、速度を上げると、出力ピークの数が0.025 m / sの1から0.125m / sの5に増加しました。スライド速度を大きくすると、1回の作業サイクルに必要な時間が短縮され、同じ作業時間での作業サイクル数がさらに増えるためです。現在のピーク値は0.025m / sの101nAから0.125m / sの415nAに増加しました。これは、スライド速度の増加が摩擦電荷の分離速度を効果的に増加させ、大きな出力ピーク値につながる可能性があることを意味します。 。電圧のピーク値は、0.025 m / sの3.6Vから0.125m / sの6.6Vに増加しました。これは、電気回路の測定によるものです。電圧測定回路と2DW-WTNGの入力抵抗によりRC電気回路が形成され、スライド速度を上げると2DW-WTNGの漏れ電流が減少し、出力電圧のピーク値が継続的に向上しました。これらの結果は、出力ピーク値がスライド速度と密接に関連していることを明確に示しています。スライド速度とは別に、スライド変位は2DW-WTNGの出力性能に大きく影響するもう1つの要因です。人体の運動における力学的エネルギーの大部分が小さな振幅の動きからのものであることを考えると、したがって、弱い力学的エネルギーを収集する必要があります。この側面を調査するために、2DW-WTNGは、0.1 m / sの固定スライド速度で、0.4 mm、0.8 mm、1.2 mm、1.6 mm、および2.0mmのスライド変位で動作することによってテストされました。出力電流と電圧を図1と図2に示します。 3cおよびd。その出力ピーク値は、スライド変位とともに増加しました。 0.4 mmの最短変位で、出力ピーク値はそれぞれ2.3nAと0.05Vに達し、小さな動きから機械的エネルギーを掃気する能力を示しました。水平スライディングモードでの2DW-WTNGの動作メカニズムによると、1つのグレーティング上をスライドすると交互に電荷移動が発生しました。したがって、織物ベルトまたは織物繊維の幅または直径をより小さなスケールに狭めることによって、スライディングモードでの2DW-WTNGの出力をさらに改善することが有望です。
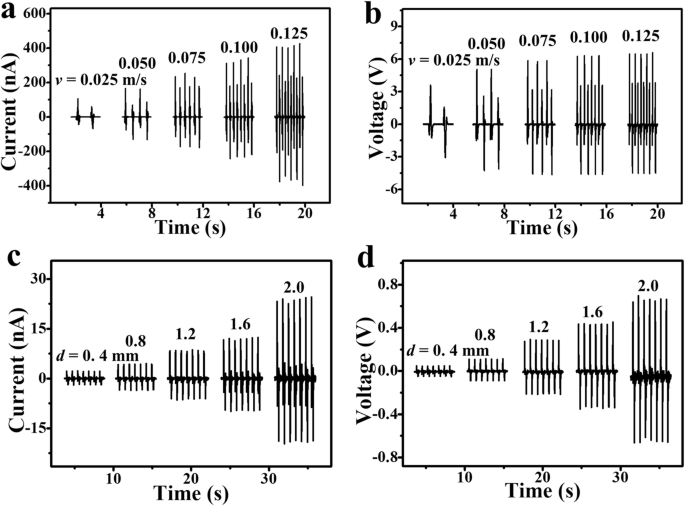
異なる相対すべり速度と相対すべり変位下での2DW-WTNGの発電性能。 a 出力電流と b 2DW-WTNGの出力電圧は、スライド速度が0.025 m / s、0.050 m / s、0.075 m / s、0.100 m / s、0.125 m / sで、8mmのスライド変位で変化しました。 c 出力電流と d 2DW-WTNGの出力電圧は、0.100 m / s
の所定のスライド速度で、0.4 mm、0.8 mm、1.2 mm、1.6 mm、および2.0mmのスライド変位で変化しました。人間の活動の複雑さを考えると、体の動きのエネルギーはさまざまな方向から来る可能性があります。したがって、資格のあるWTNGは、さまざまな方向の体の動きからエネルギーを収集できる必要があります。言い換えると、平面スライディングモードで動作するWTNGは、任意のスライディング方向に沿って動作することが期待されます。図4aに示すように、2DW-WTNGの2つの部分が向かい合って配置され、上部が X に沿って下部をスライドする可能性があります。 -軸。移動方向を保ちながら上部を回転させると角度(θ )スライド方向と上部の片側の間。ここで、θ 本質的には、2DW-WTNGの上部と下部の間の相対的な作業方向を表しており、2DW-WTNGが異なる相対的な作業方向で作業できる必要がありました。これを解明するために、2DW-WTNGを一連のθでテストしました。 リニアモーターによって0.10m / sのスライド速度と10mmのスライド変位で駆動される値(0°、10°、20°、30°、40°、および50°)。異なるθでの出力電流と出力電圧 図1と図2に示します。 4bおよびc。このデバイスは、50°の相対動作方向でそれぞれ134.45nAの出力電流と2.23Vの出力電圧を生成しました。一方、面内対称性により、40°での出力電流と出力電圧は50°での出力電流と出力電圧に非常に近かった。出力電流と出力電圧はθとしてわずかに減少しましたが 2DW-WTNGの上部と下部の間の格子の不一致によって引き起こされる有効摩擦面積の減少の結果として増加するこれらの実験結果は、2DW-WTNGが異なる作業方向で正常に動作できることを強く検証しました。円筒形の複合繊維の恩恵を受けて、その滑らかな表面は、リソグラフィープロセスによって明らかに隆起したエッジを備えた狭い格子内でのぐらつきの滑りではなく、滑りを連続的かつ落ち着いてしました。同様に、任意の面内方向に沿った外部運動を2DW-WTNGの上部に加えると、運動方向に沿ってスライドし、下部と摩擦するため、運動エネルギーを収集して電気に変換することができます。 。
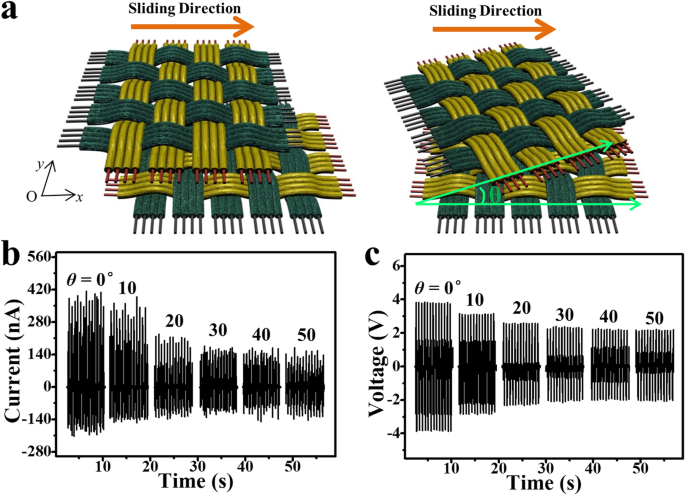
任意の面内方向に沿って動作する2DW-WTNGの適応性。 a 異なる相対方向で動作する2DW-WTNGの概略図。 b 出力電流と c 異なる相対方向での2DW-WTNGの出力電圧
エネルギーハーベスターとして、2DW-WTNGの出力は、一部の電子機器に電力を供給するのに十分な高さである必要があります。図5aに示すように、2DW-WTNGはブリッジ整流器に接続され、次に2つの分岐回路に接続されました。ブリッジ整流器を使用すると、2DW-WTNGのAC出力が直流(DC)出力に変換されました。整流されたDC信号を図5bに示します。ブリッジ整流器を最初の分岐回路に接続するとき、挿入図と追加ファイル1:ビデオS1に示すように、整流されたDC信号を直接使用して赤いLEDを点灯させました。ブリッジ整流器が2番目の分岐回路に接続されたとき、2DW-WTNGからの電気は0.47μFの商用コンデンサを充電しました。充電曲線を図5cに示し、コンデンサに保存されている対応する充電量を挿入図に示します。コンデンサは1分で1.84Vに充電され、対応する電荷密度は3.84 mC / m 2 に達しました。 。これらの2つのテストは、環境発電機として、2DW-WTNGが便利な非常用電源として使用できるだけでなく、蓄電池にエネルギーを供給することもできることを示しました。さらに、2DW-WTNGの安定性は、その実用化を確実にするための重要な要素です。ここでは、2DW-WTNGの安定性を、0.1 m / sのスライド速度と8mmのスライド変位で12時間連続して動作させることによってテストしました。 1時間ごとの10秒の電流曲線を図5dに示します。12時間の連続作業後の出力電流値にほとんど変化が見られず、非常に安定した発電性能を示しています。さらに、さまざまなタイプのエネルギーを除去する際の2DW-WTNGの多様性を実証するために、2DW-WTNGで一連の電気測定を実施しました。図5eの挿入図に示すように、有効摩擦は、2DW-WTNGの上部が最初に2DW-WTNGの下部と垂直に接触し(プロセスI)、次に下部の2DW-WTNGを水平にスライドするときに発生します。 (プロセスII)。測定中、接触・すべり分離操作を数回繰り返し、その出力電流を図5eに示します。最初の垂直接触摩擦プロセスでは、高いが狭い出力ピークがあり、次の水平滑り摩擦プロセスでは、低いが広いピークがありました。次の測定サイクルの最後の垂直分離プロセスでは、高いが狭い出力ピークが表示されるはずですが、欠落しています。これは2つの理由に起因する可能性があります。 1つは、2DW-WTNGの上部が、2DW-WTNGの反対側の下部から滑り出ており、電位がほぼ釣り合っていることです。もう1つは、最後の垂直分離プロセスがかなり遅かったため、電位が空気中ですぐに平衡に達したということです。合成分析により、これら2種類の出力電流ピークは、2DW-WTNGの2つの動作モードの特性と一致しており、人体の動きにおける垂直陽圧と水平接線力からエネルギーを除去する強力な適応性を示していることが確認されました。
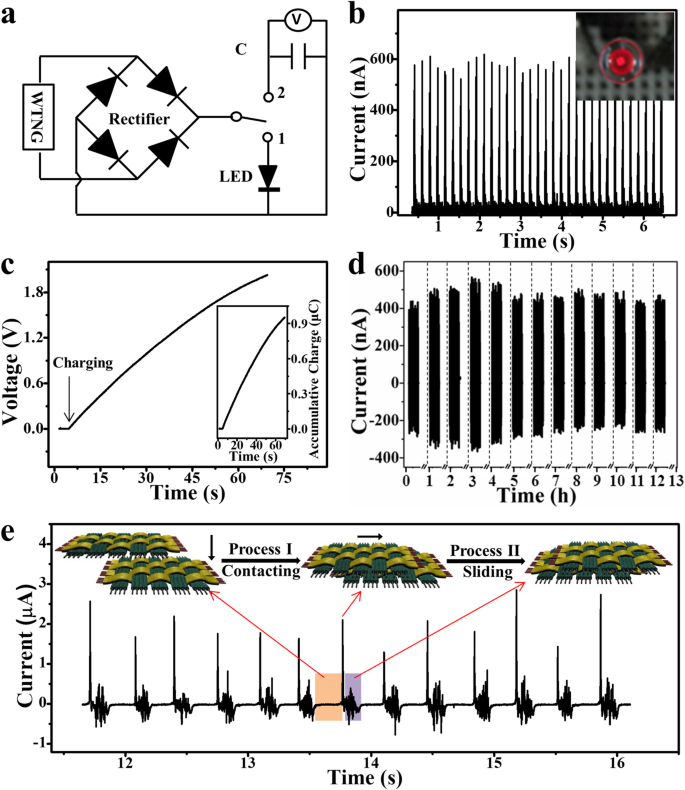
2DW-WTNGの適用。 a 出力端子に2つの分岐回路を備えた整流回路。 b 整流された出力電流信号。挿入図は、整流された電流信号によって電力が供給される赤色LEDの光学画像です。 c 整流電流によって充電された0.47μFの商用コンデンサの充電曲線。インサートは、コンデンサに蓄積された対応する出力電荷です。 d 2DW-WTNGの出力電流は12時間連続して動作します。 e 2つの異なる動作モードで動作する2DW-WTNGの出力電流は、人体の運動エネルギーを除去する際の2DW-WTNGの多様性を示しています。作業プロセスは挿入図に示されています
追加ファイル1:ビデオS1。 赤いLEDを瞬時に点灯させるビデオ。 (AVI 1334 kb)
結論
要約すると、ウェアラブル電源として2D織り構造を備えた新しいWTNGが、簡単にスケーラブルなアプローチで開発されました。この2DW-WTNGは、機械的エネルギーを電気に変換する優れた能力を実証し、最大2.73 mA / m 2 の電流密度を生成しました。 。エネルギー貯蔵プロセスを必要とせずに、市販の赤色LEDに瞬時に電力を供給することができます。また、0.47μFのコンデンサを1分で1.84 Vに充電するために使用することもでき、電荷密度は3.84 mC / m 2 に達しました。 1分で2DW-WTNGは、コアシェル構造のファイバーと織り構造の堅牢性の恩恵を受けて、任意のスライド方向で機能する可能性があります。さらに、2DW-WTNGは、さまざまな形態の機械的エネルギーを収穫するために適用され、安定した出力で12時間連続して動作しました。卓越した性能、柔軟性、操作性、および堅牢性により、2DW-WTNGは人体の動きから機械的エネルギーを収集し、低電力の電子製品に電力を供給することができました。最も重要なことは、この作業により、ファイバーベースのウェアラブルジェネレーターを大量生産するための設計モデルが提供され、個人用電子機器の開発が大幅に促進されることです。
データと資料の可用性
現在の作業のデータと分析は、合理的な要求に応じて対応する著者から入手できます。
略語
- 2DW-WTNG:
-
2D織りウェアラブル摩擦電気ナノ発電機
- AC:
-
交流
- DC:
-
直流
- LED:
-
発光ダイオード
- SEM:
-
走査型電子顕微鏡
- WTNG:
-
ウェアラブル摩擦電気ナノ発電機
ナノマテリアル
- エッジIoTデバイスの環境発電を機能させる
- 効果的なメンテナンスプログラムのための50のアイデア
- トリレンマ:効果的な変電所運用のための3つのヒント
- エネルギー貯蔵への応用のための酸化鉄ベースのナノ構造の進歩
- ポリジメチルシロキサンクロスカップリング回折格子に基づく多自由度運動パラメータの測定方法
- 最大の太陽エネルギー収穫のためのInPナノワイヤの効率的かつ効果的な設計
- スーパーキャパシター用途の電極としてのグラフェン/ WO3およびグラフェン/ CeOx構造の評価
- フィルム摩擦電気ナノ発電機に基づく周波数選択性のためのバイオニック蝸牛基底膜音響センサーの設計
- 人間の発汗感知のための澱粉紙ベースの摩擦電気ナノ発電機
- 直動用はすば歯車ラック
- 圧縮空気のエネルギー効率に関する 5 つのヒント