


同期モーター
単相同期モーター
単相同期モーターは、計時、(クロック)、テーププレーヤーなどの正確なタイミングを必要とするアプリケーション向けに小型サイズで提供されています。電池式のクォーツ調整時計は広く入手可能ですが、ACラインで動作する種類の方が、数か月にわたって長期的な精度が高くなります。
これは、発電所のオペレーターがAC配電システムの周波数の長期的な精度を意図的に維持しているためです。それが数サイクル遅れると、ACの失われたサイクルを補うので、時計は時間を失うことはありません。
大型同期モーターと小型同期モーター
10馬力(10 kW)を超えると、より高い効率と主要な力率により、大型の同期モーターが産業で有用になります。同期モーターはより複雑ですが、大型の同期モーターは、より一般的な誘導モーターよりも数パーセント効率的です。
モーターと発電機は構造が似ているので、発電機をモーターとして使用でき、逆にモーターを発電機として使用できるはずです。
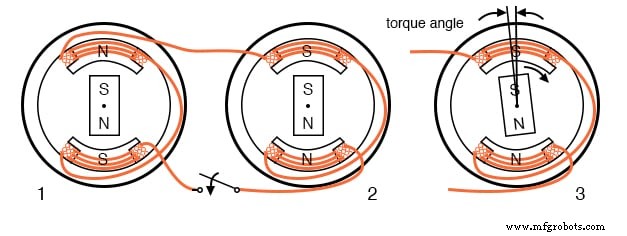
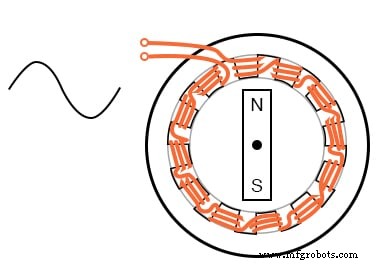
非同期モーターは、回転磁界を備えたオルタネーターに似ています。下の図は、永久磁石の回転磁界を備えた小型オルタネーターを示しています。下の図は、機械的エネルギー源によって駆動される2つの並列で同期されたオルタネーター、または同期モーターを駆動するオルタネーターのいずれかです。または、外部電源が接続されている場合は、2つのモーターである可能性があります。
重要なのは、どちらの場合でも、ローターは同じ公称周波数で動作し、互いに同相でなければならないということです。つまり、同期する必要があります 。 2つのオルタネーターを同期させる手順は、(1)スイッチを開く、(2)両方のオルタネーターを同じ回転速度で駆動する、(3)両方のAC出力が同相になるまで1つのユニットの位相を進める、または遅らせる、(4)閉じることです。位相がずれる前のスイッチ。
同期されると、オルタネーターは互いにロックされ、一方のユニットをもう一方のユニットから緩める(同期が外れる)にはかなりのトルクが必要になります。
オルタネーターと連動して動作する同期モーター
同期モーターによるトルクの計算
上記の回転オルタネーターのいずれかのローターに回転方向により多くのトルクが加えられると、ローターの角度は、同期されたままで、ステーターコイルの磁場に対して前進します((3)の反対)。ローターはオルタネーターのようにACラインにエネルギーを供給します。
ローターは、他のオルタネーターのローターに対しても前進します。上記のいずれかのユニットにブレーキなどの負荷がかかると、ローターの角度が(3)のようにステーターフィールドに遅れ、モーターのようにACラインからエネルギーを引き出します。
過度のトルクまたは抗力が加えられると、ローターは最大トルク角度を超えます。 同期が失われるほど進んだり遅れたりします。トルクは、モーターの同期が維持されている場合にのみ発生します。
同期モーターを高速化
オルタネーターの代わりに小さな同期モーターの場合、オルタネーターの複雑な同期手順を実行する必要はありません。ただし、同期モーターは自動始動しないため、発電機の回転速度にロック(同期)する前に、オルタネーターのおおよその電気速度まで上げる必要があります。
速度が上がると、同期モーターはAC電源との同期を維持し、トルクを発生させます。
Sinewaveは同期モーターを駆動します
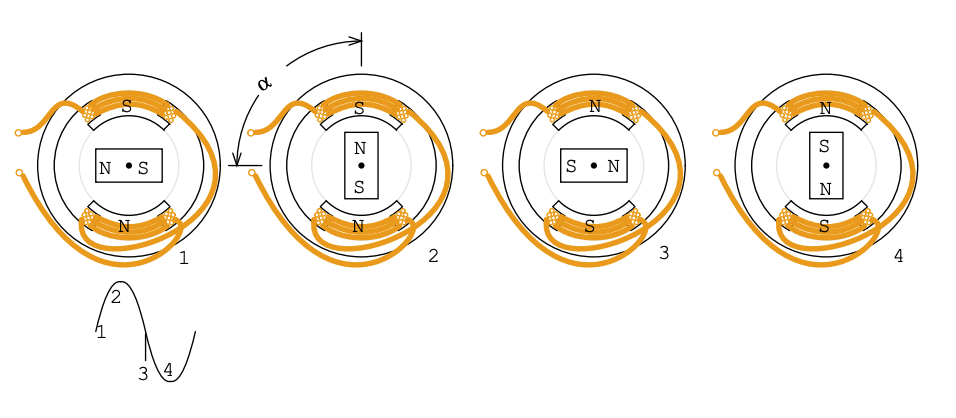
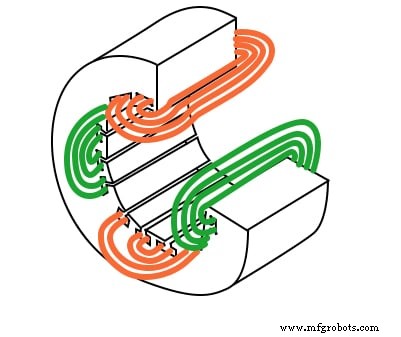
モーターが同期速度に達していると仮定すると、上の図(1)で正弦波が正に変化すると、下側の北コイルが北側の回転子極を押し、上側の南側コイルがその回転子の北極を引き付けます。同様に、回転子の南極は上部の南コイルによってはじかれ、下部の北コイルに引き付けられます。
(2)で正弦波がピークに達するまでに、回転子のN極を上に保持するトルクが最大になります。このトルクは、(3)で正弦波が0 VDCに減少し、トルクが最小になると減少します。
正弦波が(3と4)の間で負に変化すると、下側の南コイルが南側の回転子極を押し、北側の回転子極を引き付けます。同様の方法で、北の回転子極は上部の北のコイルによってはじかれ、下部の南のコイルに引き付けられます。 (4)で、正弦波は負のピークに達し、再び最大のトルクを保持します。正弦波が負から0VDC、正に変化すると、このプロセスが新しい正弦波サイクルで繰り返されます。
上の図は、無負荷状態(α=0°)でのローター位置を示していることに注意してください。実際には、ローターに負荷をかけると、ローターは角度αで示される位置より遅れます。この角度は、最大モータートルクがα=90°に達するまで負荷とともに増加します。
この角度を超えると、同期とトルクが失われます。単相同期電動機のコイルの電流は、極性を変えながら脈動します。
永久磁石の回転子の速度がこの交代の周波数に近い場合、それはこの交代に同期します。コイルの界磁は脈動して回転しないため、補助モーターで永久磁石の回転子を回転させる必要があります。これは、次のセクションにあるものと同様の小さな誘導モーターです。
フィールドポールを追加すると、速度が低下します
2極(N-S極のペア)オルタネーターは、3600 rpm(1分あたりの回転数)で回転すると60Hzの正弦波を生成します。 3600 rpmは、毎秒60回転に相当します。同様の2極永久磁石同期モーターも3600rpmで回転します。
より多くの極対を追加することにより、より低速のモーターを構築することができる。 4極モーターは1800rpmで回転し、12極モーターは600rpmで回転します。示されている構造のスタイル(上の図)は、説明のためのものです。高効率、高トルクの多極固定子同期モーターは、実際には回転子に複数の極があります。

1巻線12極同期モーター
上の図に示すように、12極モーター用に12コイルを巻くのではなく、12個の交互に配置された鋼極片で1つのコイルを巻いてください。 ACが印加されるとコイルの極性が変わりますが、上部が一時的に北、下部が南であると想定します。
ポールピースは、南フラックスをコイルの下部と外側から上部にルーティングします。これらの6南は、コイルのスチールポールピースの上部から上に曲げられた6北タブでインターリーブされています。したがって、永久磁石の回転子バーは、棒磁石の1回の物理的な回転で6サイクルのACに対応する6極のペアに遭遇します。
回転速度はACの電気速度の1/6になります。回転子の速度は、2極同期モーターで発生する速度の1/6になります。例:60 Hzは、2極モーターを3600 rpmで回転させ、12極モーターの場合は600rpmで回転させます。
www.clockHistory.comでWestcloxHistoryの許可を得て転載
固定子(上の図)は、12極のWestclox同期クロックモーターを示しています。構造は前の図と同様ですが、コイルが1つあります。ワンコイルスタイルの構造は、低トルクモーターに経済的です。この600rpmモーターは、時計の針を動かす減速機を駆動します。
Q: Westcloxモーターが50Hzの電源から600rpmで動作する場合、いくつの極が必要になりますか?
A: 10極モーターには5対のN-S極があります。 50/5 =10回転/秒または600rpm(10 s-1 x 60 s /分)で回転します。

www.clockHistory.comでWestcloxHistoryの許可を得て転載
ローター(上の図)は、永久磁石バーと鋼製の誘導モーターカップで構成されています。ポールタブ内で回転する同期モーターバーは、正確な時間を維持します。バーマグネットの外側の誘導モーターカップは、タブの外側と上に収まり、自動始動します。かつて、誘導電動機カップのない非自動始動電動機が製造されていました。
三相同期モーター
下図に示すような3相同期モーターは、固定子に電気的に回転する磁界を生成します。このようなモーターは、産業環境で見られるような50または60Hzなどの固定周波数電源から始動した場合は自己始動しません。
さらに、ローターは、産業で使用されるマルチ馬力(マルチキロワット)モーター用の永久磁石ではなく、電磁石です。大型の産業用同期モーターは、誘導モーターよりも効率的です。一定速度が必要な場合に使用します。力率が先行しているため、力率が遅れている場合にACラインを修正できます。
固定子励起の3つのフェーズはベクトル的に加算され、1秒間にf / 2n回回転する単一の合成磁場を生成します。ここで、fは電力線周波数であり、産業用電力線で動作するモーターの場合は50または60Hzです。極の数はnです。ローター速度(rpm)の場合、60を掛けます。
S =f120 / nここで、S =回転子速度(rpm)f =ACライン周波数n =相あたりの極数
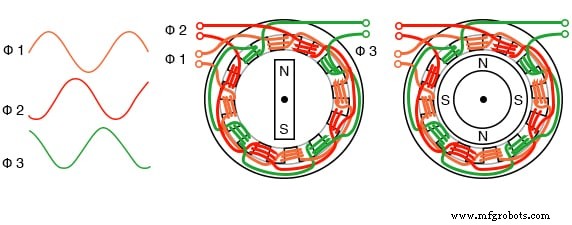
三相4極(相ごと)同期モーターは、60Hzの電力で1800rpm、または50Hzの電力で1500rpmで回転します。コイルがφ-1、φ-2、φ-3の順序で一度に1つずつ通電される場合、ローターは対応する極を順番に指す必要があります。
正弦波は実際に重なっているため、結果のフィールドは段階的にではなくスムーズに回転します。たとえば、φ-1とφ-2の正弦波が一致する場合、フィールドはこれらの極の間を指すピークになります。示されているバーマグネットローターは、小型モーターにのみ適しています。
複数の磁極を持つローター(右下)は、かなりの負荷を駆動する効率的なモーターで使用されます。これらは、大型産業用モーターのスリップリング給電電磁石になります。大型の産業用同期モーターは、電機子に埋め込まれたかご形導体によって自己始動し、誘導モーターとして機能します。
電磁電機子は、ローターがほぼ同期速度に達した後にのみ通電されます。
三相4極同期モーター
小型多相同期モーター
小型の多相同期モーターは、駆動周波数をゼロから最終運転周波数まで上昇させることによって始動できます。多相駆動信号は電子回路によって生成され、最も要求の厳しいアプリケーションを除くすべてのアプリケーションで方形波になります。
このようなモーターは、ブラシレスDCモーターとして知られています。真の同期モーターは、正弦波形で駆動されます。固定子に適切な数の巻線を供給することにより、2相または3相駆動を使用できます。上に表示されているのは3相のみです。
電子同期モーター
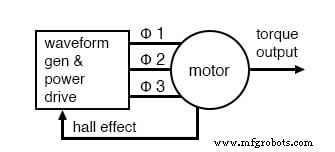
ブロック図は、低電圧(12 V DC)同期モーターに関連するドライブエレクトロニクスを示しています。これらのモーターには位置センサーがあります モーター内に統合されており、モーターの回転速度に比例した周波数の低レベル信号を提供します。
位置センサーは、ホール効果などの固体磁場センサーと同じくらい単純なものにすることができます。 ドライブ電子機器に転流(電機子電流方向)タイミングを提供するデバイス。位置センサーは、レゾルバ、インダクトシン(磁気エンコーダー)、または光学エンコーダーなどの高解像度角度センサーである可能性があります。
一定で正確な回転速度が必要な場合は、(ディスクドライブの場合)タコメーター およびフェーズロックループ 含まれる場合があります(下の図)。このタコメータ信号は、モーター速度に比例するパルス列であり、位相ロックループにフィードバックされます。このループは、タコメータの周波数と位相を水晶発振器などの安定した基準周波数ソースと比較します。
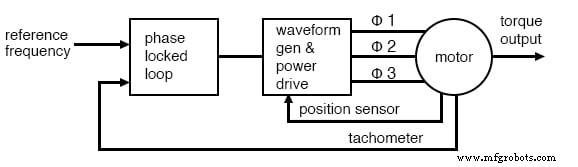
フェーズロックループは同期モーターの速度を制御します
ブラシレスDCモーター
単純なホール効果センサーによって提供される、電流の方形波によって駆動されるモーターは、ブラシレスDCモーターとして知られています。 。このタイプのモーターは、リップルトルクが高くなります。 正弦波駆動モーターよりもシャフト回転による変動。これは多くのアプリケーションにとって問題ではありません。ただし、このセクションでは主に同期モーターに関心があります。
モーターリップルトルクと機械的アナログ
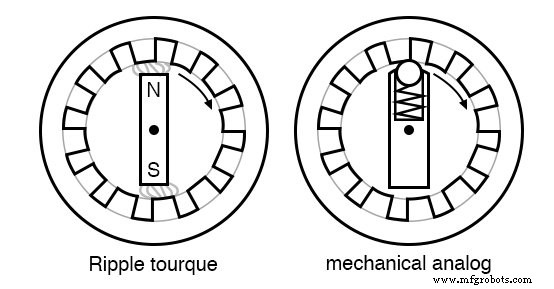
リップルトルク、またはコギングは、ローターポールがステーターポールピースに磁気的に引き付けられることによって発生します。 (上の図)固定子コイルがないことに注意してください。 PMローターは手で回転させることができますが、ポールピースの近くにあるとポールピースに引き付けられます。
これは、機械的な状況に類似しています。テーププレーヤーで使用されるモーターのリップルトルクは問題になりますか?はい、オーディオテープがテープ再生ヘッドを通過するときにモーターの速度と速度が交互に変わることは望ましくありません。ファンモーターにとってリップルトルクは問題になりますか?いいえ。
ベルトに分布する巻線は、より正弦波のフィールドを生成します
モーターがモーター逆起電力と同期する正弦波電流によって駆動される場合、駆動波形が電子的手段によって生成されるかどうかに関係なく、モーターは同期ACモーターとして分類されます。同期モーターは正弦波の逆起電力を生成します emf 固定子の磁場が正弦波分布である場合。
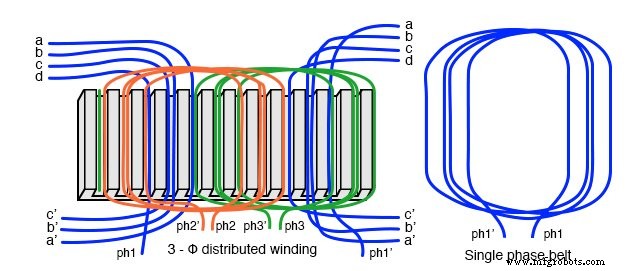
極巻線が1つの大きな極に集中するのではなく、ベルト内で多くのスロットに分散されている場合は、より正弦波になります(簡略化された図のほとんどに示されています)。この配置により、固定子フィールドの奇数次高調波の多くがキャンセルされます。
相巻線の端の巻線が少ないスロットは、他の相とスペースを共有する場合があります。下の図に示すように、巻き取りベルトは別の同心円状になる場合があります。
同心ベルト
正弦波で駆動される2相モーターの場合、トルクは三角法の恒等式によって1回転中一定です。
sin2θ+cos2θ=1
駆動波形の生成と同期には、ブラシレスDCモーターで使用されるホール効果センサーによって提供されるよりも正確なローター位置の表示が必要です。 リゾルバ 、または光学式または磁気式エンコーダ 、1回転あたり数百から数千の部品(パルス)の分解能を提供します。
レゾルバは、シャフト角度の正弦および余弦に比例する信号の形式でアナログ角位置信号を提供します。エンコーダは、シリアルまたはパラレル形式のデジタル角度位置表示を提供します。
正弦波ドライブは、実際にはPWM、パルス幅変調器からのものである可能性があります。 、正弦波をデジタル波形で近似する高効率の方法。各フェーズには、フェーズごとに適切な量だけ位相シフトされたこの波形のドライブ電子機器が必要です。
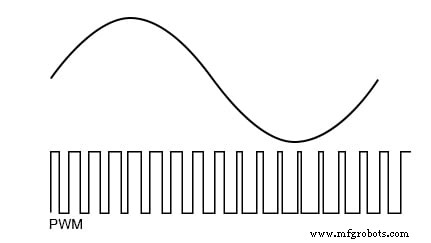
PWMは正弦波を近似します
同期モーターの利点
同期電動機の効率は誘導電動機よりも高くなっています。特に高エネルギーの永久磁石がローターに使用されている場合は、同期モーターを小さくすることもできます。最新のソリッドステートエレクトロニクスの出現により、これらのモーターを可変速度で駆動できるようになりました。
誘導電動機は主に鉄道の牽引に使用されます。ただし、駆動輪の内側に取り付けられる小さな同期モーターは、そのようなアプリケーションにとって魅力的です。 高温超伝導 このモーターのバージョンは、銅巻きモーターの5分の1から3分の1の重量です。
最大の実験用超電導同期モーターは、海軍駆逐艦クラスの船を運転することができます。これらすべてのアプリケーションでは、電子可変速ドライブが不可欠です。可変速ドライブは、低周波数での誘導性リアクタンスの低下により、低速でのドライブ電圧も低下させる必要があります。
最大トルクを発生させるには、ローターはステーターの界磁方向から90°遅れる必要があります。これ以上、同期が失われます。はるかに少ないと、トルクが減少します。したがって、ローターの位置を正確に知る必要があります。また、固定子フィールドに対する回転子の位置を計算して制御する必要があります。
このタイプの制御は、ベクトル位相制御として知られています。 。これは、固定子相のパルス幅変調器を駆動する高速マイクロプロセッサで実装されています。同期モーターの固定子は、より一般的な誘導モーターの固定子と同じです。
その結果、誘導モーターで使用される産業グレードの電子速度制御は、大型の産業用同期モーターにも適用できます。従来の回転同期モーターの回転子と固定子を展開すると、同期リニアモーターが生成されます。
このタイプのモーターは、正確な高速リニアポジショニングに適用されます。
関連ワークシート:
- ACモーター理論ワークシート
産業技術