


Arduinoチュートリアル04:モーター
Arduinoチュートリアルシリーズの4番目のArduinoチュートリアルへようこそ。このチュートリアルでは、PWM(パルス幅変調)を使用してDCモーターとサーボモーターを制御する方法を学習します。
これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要なパーツと、ビデオの例のソースコードがあります。
最初の例に必要なコンポーネント
開示:これらはアフィリエイトリンクです。アマゾンアソシエイトとして、私は対象となる購入から稼ぎます。
DCモーターを制御する最初の例の回路図
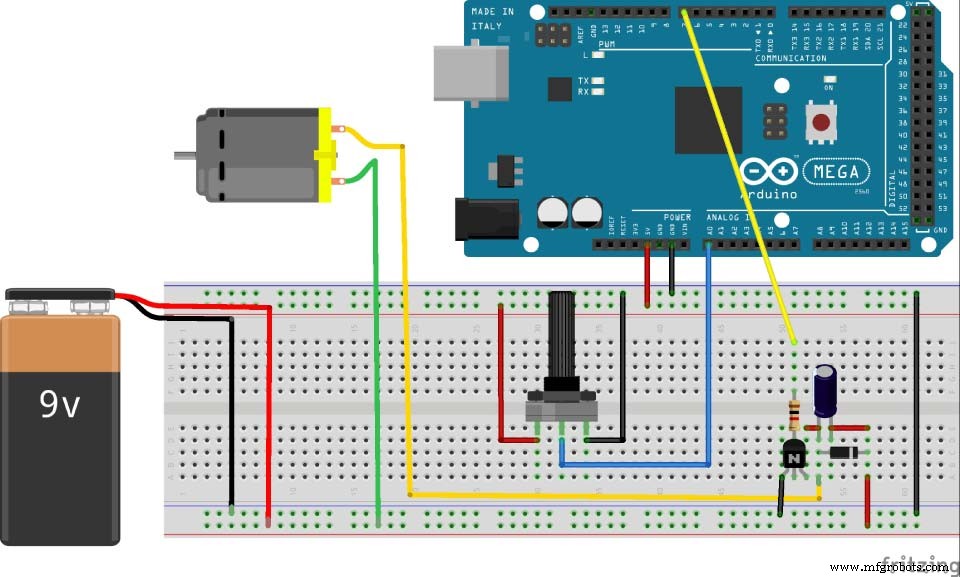
DCモーターを制御する最初の例のソースコード
int pwmPin = 7;
void setup() {
Serial.begin(9600);
pinMode( pwmPin, OUTPUT);
}
void loop () {
int potValue = analogRead(A0);
int newpotValue = map(potValue, 0, 1023, 0 , 255);
analogWrite(pwmPin, newpotValue);
}Code language: Arduino (arduino)
2番目の例、サーボモーターの制御に必要な部品
2番目の例の回路図、サーボモーターの制御
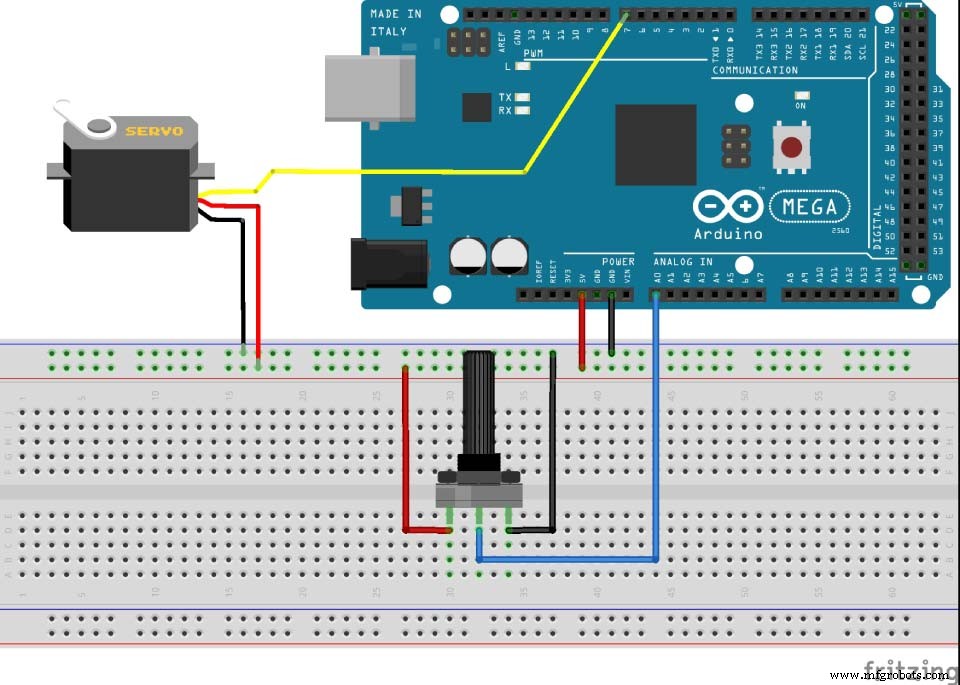
2番目の例のソースコード、サーボモーターの制御
#include <Servo.h>
Servo myServo;
void setup() {
myServo.attach(7);
}
void loop() {
int potValue = analogRead(A0);
int angleValue = map(potValue, 0, 1023, 0, 180);
myServo.write(angleValue);
delay(10);
}Code language: Arduino (arduino)
製造プロセス