


モーター保護–障害の種類と保護装置
モーターの故障と保護装置の種類
一般的なモーターの障害と障害
モーターの故障と故障を理解して理解することが重要です。 最も適切な保護デバイスを定義する 各ケース 。また、モーターの制御と保護に関連する重要な用語についても知っておく必要があります。
非静的マシンであること モーター 電気的および機械的ストレスにさらされている 。
モーターの障害 3つの基本的なタイプがあります :電気的、機械的、機械的で進歩する 電気に 。
一般的なモーターの故障と故障の種類 は:
- ベアリングの故障
- 絶縁の内訳
- ロックされたローター
- 過熱
- 過負荷(電気的および機械的)
- 位相の不均衡と電圧の不均衡は、さらに高い電流の不均衡につながります。
- 逆方向に実行
- シャフトのミスアライメント
- 振動
過熱 モーターの小型化から発生する可能性があります 、低速での冷却が不十分 可変速ドライブを使用する場合 ( VSD )、負荷の変更 モーター 詰まった機器など および高温の周囲条件 。
絶縁の内訳 、焼けた巻線につながる 、 短絡を意味します モーター内またはモーターの電源回路内のいずれか 、および過熱、過負荷、過電圧が原因である可能性があります 。
約 80% 電気モーターの故障 モーターステーターの巻線損傷とベアリングの故障の結果です 。
ベアリングの失敗 モーターの場合は表示になります 間違ったベアリングの アプリケーション用 。
モーターが垂直に取り付けられている 異なるベアリングが必要です 次に、水平に取り付けられたモーター 。 大型またはマルチベルトドライブを駆動するモーター 大きなラジアル荷重を処理するベアリングが必要です 。 モーターボルト 歪んだベースプレートはねじれます 。
ベアリング 通常は小さい 他の主要なモーターコンポーネントとの比較 、それらを特に損傷や摩耗に対して脆弱にする;いくつかの研究は、ベアリングの誤動作によるすべてのモーターの故障の半分以上を非難しています 、そのほとんどは潤滑が少なすぎるか多すぎる結果です。 。 ベアリングの故障のもう1つの重要な原因 ミスアライメントです 。
シャフトのずれ 破壊します ベアリング よく彼らの完全な労働生活の前に 。 モーターシャフト 駆動しているシャフトと直接一致している必要があります 達成できるのは 精密な位置合わせ技術を使用する レーザーなど 。
その他の問題 モーターで発生する可能性のあるものは次のとおりです。
- 水やほこりがステータコイルまたは端子ハウジングに侵入し、短絡を引き起こします
- ソフトフットモーターの脚が水平からボルトで固定されています
- モーターの取り付けまたはハウジングのタイプが間違っています
- 電気的または機械的な不均衡
ノイズ 運動の問題を示します ただし、通常は損傷を引き起こしません 。 ノイズ ただし、通常は振動を伴います 。
バイブレーション いくつかの方法で損傷を引き起こす可能性があります 。 巻線をゆるめる傾向があります および断熱材に機械的損傷を与える 素材のひび割れ、はがれ、または摩耗による 。 整流子または集電装置のリングでの過度の動きやブラシのスパークによるリード線の脆化も、振動によって発生します。
最後に、バイブレーション スピードベアリングの故障が発生する可能性があります ボールにスリーブベアリングを「ブリンネル」させる 形が崩れたり、ハウジングがシェルで緩んだりする 。
ノイズやバイブレーション 動作中のモーター、ソースにあります 迅速に分離して修正する必要があります 。
ノイズや振動の明らかな原因と思われるものは、隠れた問題の症状である可能性があります。したがって、徹底的な調査が必要になることがよくあります。
ノイズとバイブレーション モーターシャフトのずれが原因である可能性があります またはモーターに送信することもできます 駆動機械または動力伝達システムから 。また、モーターの電気的または機械的な不均衡の結果である可能性もあります。 。
電気的不均衡 固定子と回転子の間の磁気引力が発生したときに発生します 周りが不均一 モーターの周辺 。これにより、シャフトがたわむ 回転しながら 機械的な不均衡 。 電気的不均衡 通常、電気的障害を示します オープンステータまたはローター巻線など 、オープンバーまたはリング かご形モーター または短絡した界磁コイル 同期モーター 。 通常、摩耗の悪いスリーブベアリングによる不均一なエアギャップも、電気的不均衡を引き起こします 。
機械的な不均衡の主な原因 取り付けのゆがみ、シャフトの曲がり、ローターのバランスの悪さ、ローターの部品の緩み、またはベアリングの不良が含まれます。 。 ノイズ ファンがフレーム、シュラウド、またはシュラウド内の異物に当たった場合から発生することもあります。 。 ベアリングが悪い場合 、過度のベアリングノイズで示されます 、ベアリングが故障した理由を特定する必要があります 。
モーターが直面する可能性のあるもう1つの問題は、長い開始時間です。 。モーターが何度も連続して始動する場合 、回転子巻線または回転子バー ローターバーとエンドリングの間の電気接続が損傷するまで加熱することができます 。
モーター保護デバイス
定格電圧とサイズに関係なく モーターは、過電流(短絡)および過負荷から保護されています 。
中小規模のLVモーター 通常、過負荷や短絡からのみ保護されます および大型LVモーターおよびMVモーター 他の保護もあります 。
過負荷および過電流保護 開始時に突入電流の影響を受けないように設計する必要があります 、回避する 早すぎる停電 。
LVモーターの場合 過電流および短絡に対する保護 ヒューズで実行できます 、スイッチ断路器または瞬時トリップ回路ブレーカーに関連付けられている 即時に応答する (ほぼ瞬時 )短絡、地絡、またはロックされたローター電流からの電流の値 。
逆時間サーキットブレーカー 熱と瞬間の両方のトリップ機能があります 標準化されたレベルでトリップするように事前設定されています 。
これは、住宅、商業、および重建設の建築業で使用される最も一般的なタイプのサーキットブレーカーです。
熱作用 このサーキットブレーカーの 熱に反応します 。 モーターの換気口と出口が巻線から熱を放散するのに十分でない場合 モーターの熱が検出されます 熱作用による サーキットブレーカの 。
短絡の場合 発生するはずです、磁気作用 サーキットブレーカの 電流の瞬間的な値を検出し、回路ブレーカーをトリップします 。
ヒューズ 通常、過負荷からの保護には適していません 、過負荷保護を提供するサイズの場合 、モーターの突入電流が大きいためにモーターが始動すると吹き飛ばされます 、ただし、過負荷バックアップ保護として使用できます。 。
ヒューズによる保護 単相損傷のリスクを示します ヒューズが1つだけ切れたときにモーターに接続します 単相保護が提供されていない場合;このテーマについては、この章の後半で説明します。
大型のLVモーターとMVモーター 短絡から保護されています (フェーズ間およびフェーズ間 )過電流リレー ( 50; 50N; 51; 51N ) CTに接続 。
過負荷からの保護 通常、熱過負荷リレーによって保証されます 。このリレーには、次のタイプがあります。
バイメタルストリップ
熱過負荷保護 対応します モーターの短時間の高始動電流 正確に保護しながら 実行中の現在の過負荷から 。 ヒーターコイル およびアクション バイメタルストリップの 時間遅延を導入する モーターが始動して通常の運転電流に落ち着くまでの時間を確保します 熱過負荷トリップなし 。 熱過負荷保護 手動または自動でリセット可能にすることができます アプリケーションに応じて、アジャスターがあります これにより、モーターの運転電流に正確に設定することができます 。
周囲温度 スターターとモーターが配置されている 考慮する必要があります バイメタルストリップリレーを選択する場合 周囲温度が高いと過負荷トリップ時間が短縮されるため 。
過負荷トリップ時間の短縮 迷惑なトリップにつながる可能性があります モーターがスターターよりも低い周囲温度にある場合 燃え尽き症候群につながります モーターがスターターよりも高温の周囲温度にある場合 。
ほとんどの熱過負荷デバイス 最高温度40ºCでの使用が評価されています 、およびリレーの遅延が必要になる場合があります 。
ほとんどのリレー 範囲全体で調整可能 85%から 115% それらの価値の。
一部のモデルは周囲補正で利用できます 。 アンビエント補正デバイス トリップポイント 周囲温度の影響を受けません 電流の同じ値で一貫して動作します。
このタイプのリレーは、低および中サイズのLVモーターで一般的に使用されます 。
標準とメーカーのデータは通常、推奨される規制設定値を示しています モーターの定格電力に応じたこのタイプのリレーの;同じ表には、ヒューズの推奨定格電流も示されています。 (aMまたはgGタイプ –セクション2.4を参照)および瞬時回路ブレーカー 過電流保護のためにリレーに関連付けられている 、表3に示すように。
表3 –モーター保護用の定格ヒューズ電流 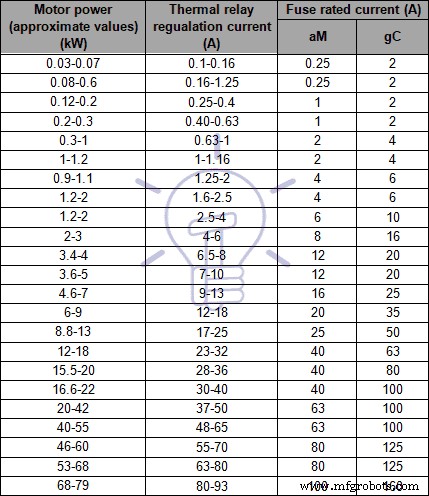
電子デジタル過負荷リレー
このタイプの保護は、大型LVモーターとHVモーターに使用されます。 、およびマイクロプロセッサが含まれています 。これらのデバイスは、モーター電流を監視することによってモーター巻線の加熱をモデル化することができ、計測および通信機能を含めることもできます。
大型LVモーターとMVモーターの一般的な保護 通常、次の保護デバイスによって実行されます。
- 過負荷保護: 49
- 瞬時位相過電流: 50
- 瞬間的な地球の過電流: 50N / 50G
- 時間遅延フェーズの過電流: 51
- 時間遅延アース過電流: 51N / 51G
状況によっては モーターを過負荷から保護することはお勧めしません;これは、消火用送水ポンプと排煙ファンの場合です。 。
非常に大型のLVモーターとMVモーター 費用がかかるため、通常はより包括的な保護スキームを提供するのが賢明です。 。このようなスキームには次のものが含まれます:
- ベアリング温度モニターと保護( 38 )
- 差動保護( 87M )
- 不完全な開始シーケンス/長い開始時間の保護( 66 )
- 負のフェーズシーケンス(フェーズ反転保護 )
- 過熱保護
- 位相不平衡または位相障害保護( 47 )
- ローター保護の停止またはロック
- 低電圧および過電圧保護( 27 および59 、それぞれ)
- 振動モニターと保護(39)
- 巻線温度モニターと保護装置
LVおよびHVモーターの差動保護
保護保護 多くの場合、中型および大型モーターに提供されます 約4kVを超える供給電圧 、および電動式 (シャントトリップ )サーキットブレーカー 。 差別的保護 高速方向とモーター固定子巻線の障害の除去を提供します 。
- また読む:LTおよびHTモーターのケーブルサイズを計算する方法
電源システムがしっかりと接地されている場合、差動保護が検出します 相間障害と相間障害の両方 。
差分保護を使用 各巻線の両端の電流を比較して、障害状態がいつ存在するかを判断します 。
この関数には2セットのCTが必要です 、 1つはモーターフィーダーの先頭にあり、もう1つはスターポイントにあります 。
差分保護機能 使用のみ 各固定子相の両側が外部接続のためにモーターから引き出された場合 各相に出入りする相電流 測定できます 。 差分要素 各相に流れる電流から各相から出る電流を差し引き、結果または差を差動ピックアップレベルと比較します。
この差がピックアップレベル以上の場合、トリップが発生します 。
図19に、この保護の例を示します。 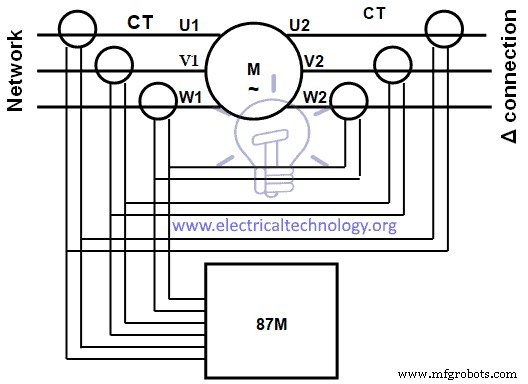
図19 –モーター差動保護
6つのCTを使用する 合計構成 、モーターの始動中、各フェーズの2つのCTからの値は等しくない場合があります l CT 完全に同一ではない および非対称電流 各フェーズのCTの出力が異なる場合があります 。
迷惑なトリップを防ぐため この構成では、差分レベル 感度を下げる必要がある場合があります 、または差分時間遅延 モーター始動時に問題のある期間を乗り切るには、延長する必要がある場合があります 。
実行中の遅延微分遅延 その後、微調整できます 非常に高速に応答するようなアプリケーションに 低差動電流レベルに敏感 。
巻線の過熱 保護は通常、抵抗温度検出器を使用して行われます。 ( RTD ) およびサーミスタ およびデバイスの自動シャットダウン インストールすることができます。 別のブースターファンを取り付ける モーターファンを支援するため 過熱の問題を解決します VSD モーター速度を制御するために使用されます eed。
不完全な開始シーケンス/長い開始時間により、ローターが過熱します 。
かご形モーターのローターの熱を物理的に測定することは不可能であるため 熱を決定するために必要です ローターがステーターに引き込む電流を測定する ローターを励起します。 サーマルレプリカ ローターのはI 2 を使用して確立されます t 曲線 。
再起動の禁止 ユーザーがモーターを始動するのをブロックします リレーがローターがローターを損傷する温度に達したと判断した場合 開始を試みる必要があります 。したがって、リレーは再起動のみを許可します ローターに始動するのに十分な熱予備力がある場合 。
ベアリング保護 通常、 RTDによって実行されます およびthermistor 温度を監視する 。
防振 センサー/加速度計を使用します 通常、モーターとベアリングの主要な位置に配置されます 。
ベアリング以降 機械式駆動列の耐荷重部分である加速度計 入力と出力に配置する必要があります
図20に、振動センサーと推奨される場所の例を示します。 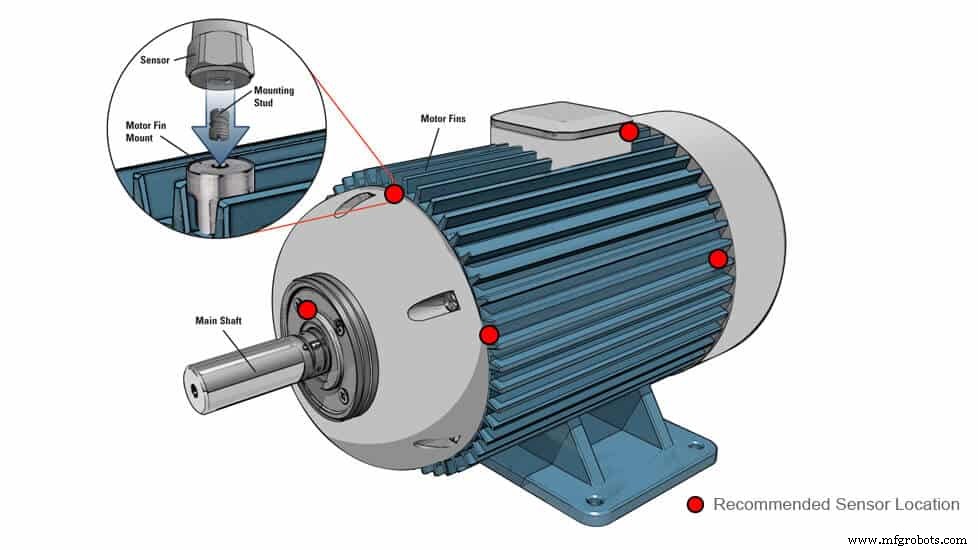
図20 –モーター振動センサー
現在 IED (セクション2.1を参照)必要なすべての保護機能をグループ化する 大型LVモーターとMVモーターに一般的に使用されます 。

作者について:Manuel Bolotinha
-電気工学のライセンス学位–エネルギーおよび電力システム(1974 –InstitutoSuperiorTécnico/リスボン大学)–電気およびコンピューター工学の修士号(2017 –FaculdadedeCiênciaseTecnologia/リスボン大学)
–変電所および電力システムのシニアコンサルタント。プロのインストラクター
産業技術