


Gセンサースマートフォンを使用して制御されるロボットカー
コンポーネントと消耗品
>  |
| × | 1 | |||

ステップ1。 二輪回路上に構築された利用可能なプラットフォームを使用したBuildrobotcar。電子部品の接続図を下の図に示します。 Arduino UNOまたは準拠ボード、Bluetooth HC-05(06)モジュール、モータードライバー、および電源バッテリーが必要になります。ギアモーターはプラットフォームに配置され、ロボットの車輪を動かすように強制します。 <図>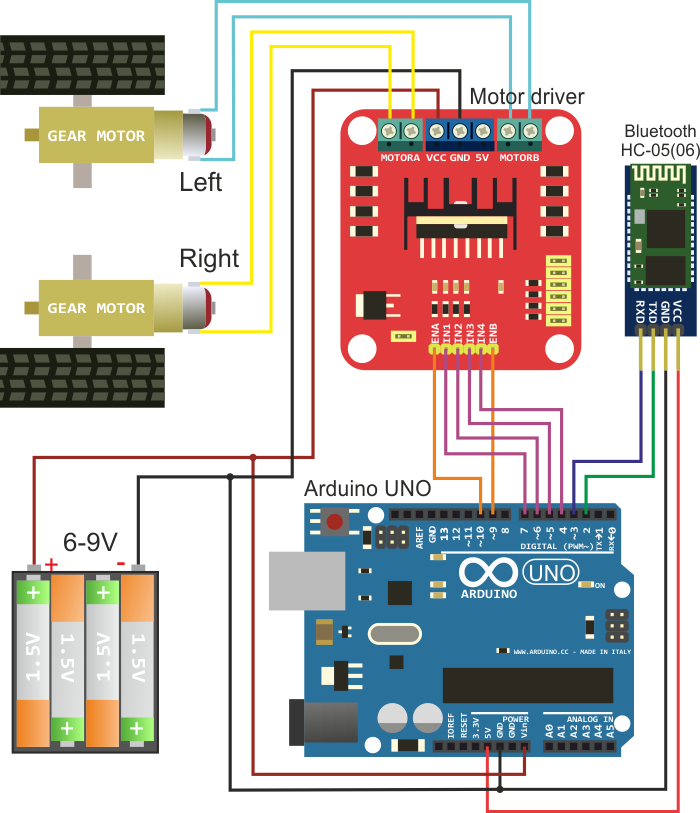 ステップ2。 http://remotexy.com/en/editor/のRemoteXYサービスのウェブサイトにアクセスし、ロボットを制御するためのグラフィカルユーザーインターフェースを作成します。ジョイスティック用のGセンサーを使用して制御機能を設定します。インターフェイスの例を次の図に示します。 [ソースコードを取得]ボタンをクリックします。 <図>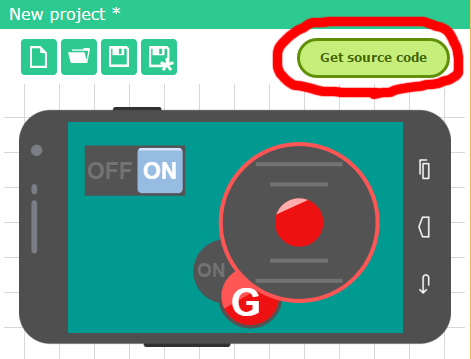
ステップ3。 GUIのソースコードをダウンロードして、ArduinoIDEで開きます。コンパイルには、RemoteXY.hライブラリが必要です。ライブラリは、リンクhttp://remotexy.com/en/library/からダウンロードできます。すでにArduinoでロードコードを試し、モバイルアプリケーションに接続することができます。ただし、これはコードブランクにすぎませんが、グラフィカルインターフェイスとモータードライバーをリンクする必要な機能を追加する必要があります。
ステップ4。 次に、グラフィカルインターフェイスを使用してロボット制御機能をソースコードに追加する必要があります。この目的のために、フィールドRemoteXY構造体。RemoteXY構造体はすべてのGUIコントロールを表示します。 結果のソースコードを以下に示します。コンパイルしてArduinoにアップロードできます。
ステップ5。 http://remotexy.com/en/download/にモバイルアプリケーションRemoteXYをインストールします。アプリケーションがモバイルデバイスで実行されている場合は、リストでBluetoothbutton接続を押し、Bluetoothモジュールの名前を選択します。HC-05(06)モジュールの場合、名前は通常INVORまたはHC-06になります。 動作します!
コード
RemoteXYモバイルアプリを介したリモートコントロールロボットカー C / C ++RemoteXY.hライブラリは、リンクhttp://remotexy.com/en/library//////////////////////////からダウンロードできます。 //////////////////// // RemoteXYインクルードライブラリ///////////////////////// ////////////////////// / * RemoteXYは接続モードを選択してライブラリをインクルードします* / #define REMOTEXY_MODE__SOFTWARESERIAL #include 回路図 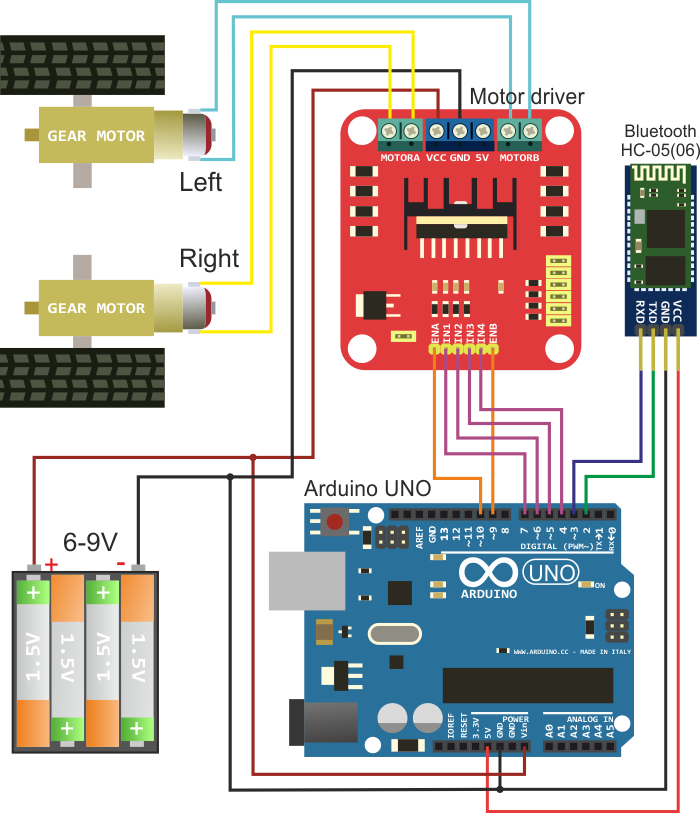 製造プロセス |