


Bluetooth制御サーボ
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
このプロジェクトでは、Bluetoothを介してスマートフォンアプリケーションを使用してサーボモーターを制御する方法を紹介します。
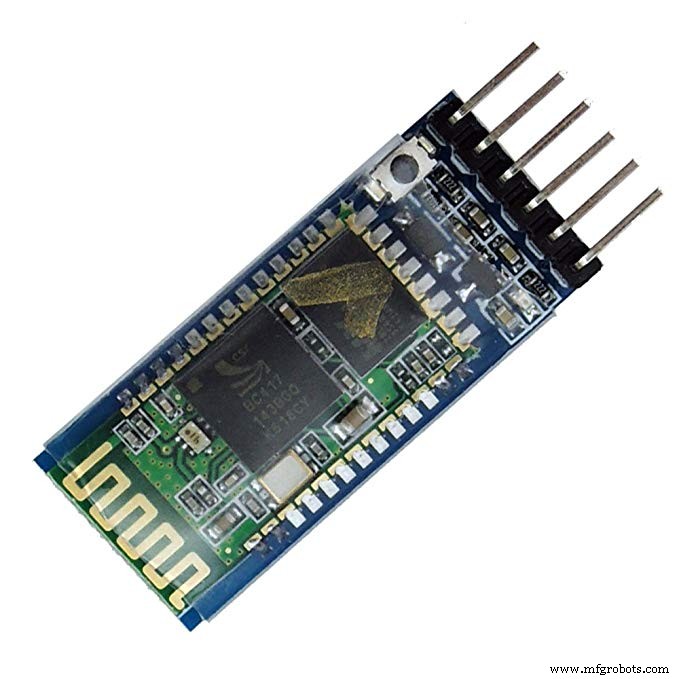
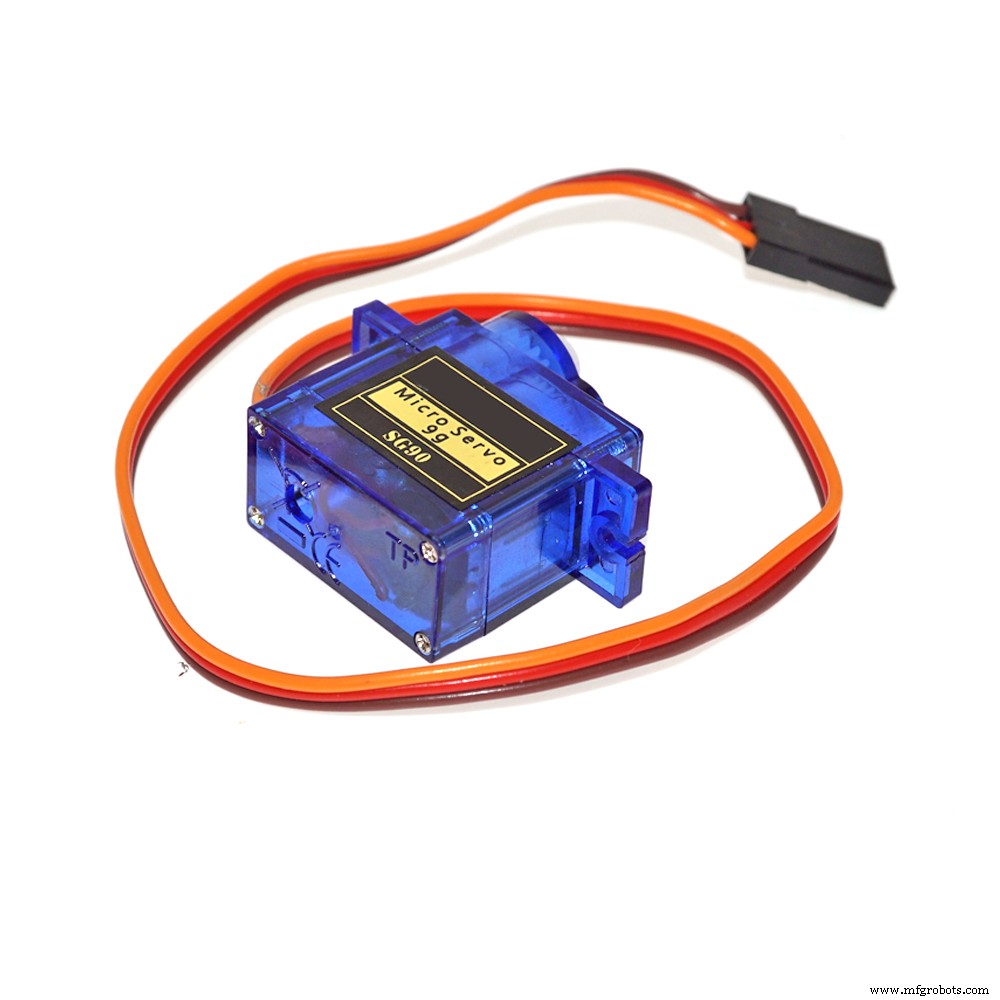
このプロジェクトでは、ArduinoUnoを搭載したBluetoothHC-05モジュールを使用してサーボ9gを制御します。
->このプロジェクトはどのように機能しますか?
このプロジェクトには2つの部分があります:
1. androidアプリケーション-このアプリケーションは、さまざまなデータパケットをHC-05Bluetoothモジュールに送信します。 (アプリケーションをダウンロードするには、ここをクリックしてください)
(p.s.このアプリは私が開発したものではありません。)
2.ハードウェア-これは、HC-05 Bluetoothモジュール、Arduino Uno、およびサーボモーターで構成されています。
->これがその仕組みです-
AndroidアプリはデータパケットをBluetoothモジュールに送信します。 Bluetoothモジュールは、シリアル通信を介してこのデータパケットをArduinoUnoに送信します。 Arduino Unoは、データパケットの値に応じてサーボモーターの制御信号を生成するようにプログラムされています。理解を深めるためのフローチャートを次に示します。
<図>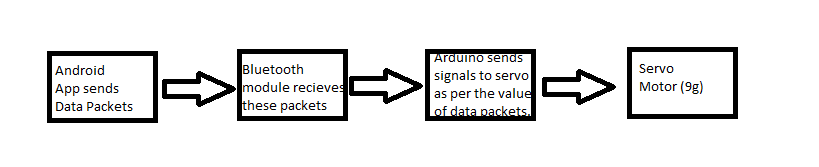
->開始方法
1.Androidアプリケーションをダウンロードします。 (ここをクリック)
2. Arduinounoにコードをアップロードします。
3.接続します。
Bluetooth HC-05モジュールは、モジュールに損傷を与える可能性があるため、5vvccではなく3.3vに接続する必要があることに注意してください。
4. BluetoothモジュールをAndroidアプリに接続します-ハードウェアの電源を入れると、Bluetoothモジュールが表示されます。そのため、アプリケーションを開き、[近くのデバイスを検索]をクリックします。 HC-05を選択します。接続されていることが表示されたら、準備は完了です。
スライダーを使用するか、値を手動で入力してサーボアームを制御できます。
コード
- Bluetooth制御サーボ
Bluetooth制御サーボ C / C ++
ArduinounoにアップロードするこのコードID。#include#include Servo x; int bttx =9; // Bluetoothモジュールのtxはarduinointのピン9に接続されていますbtrx =10; // bluetoothモジュールのrxはarduinoSoftwareSerialのピン10に接続されていますbluetooth(bttx、btrx); void setup(){x.attach(11); //サーボはarduinoSerial.begin(9600);のピン11に接続されていますbluetooth.begin(9600);} void loop(){if(bluetooth.available()> 0)// bluetoothモジュールがデータを送信している場合{intpos =bluetooth.read(); //データをpos変数Serial.println(pos);に保存しますx.write(pos); //サーボヘッドを指定された位置に移動します}}
回路図
これが回路の作り方です。 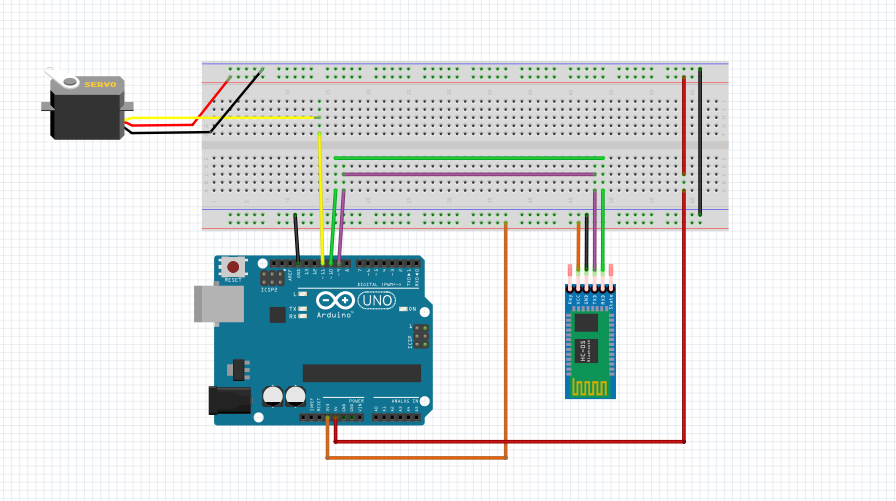
製造プロセス