


最も簡単なラインフォロワーロボット
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 |
必要なツールとマシン
>  |
| |||
| ||||
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
ラインフォロワーロボットは、ロボット工学の分野へのこんにちは世界です。このラインフォロワーは非常にシンプルで、ロボットを簡単に構築できます。
コード
- Arduinoベースのラインフォロワーロボット
Arduinoベースのラインフォロワーロボット C / C ++
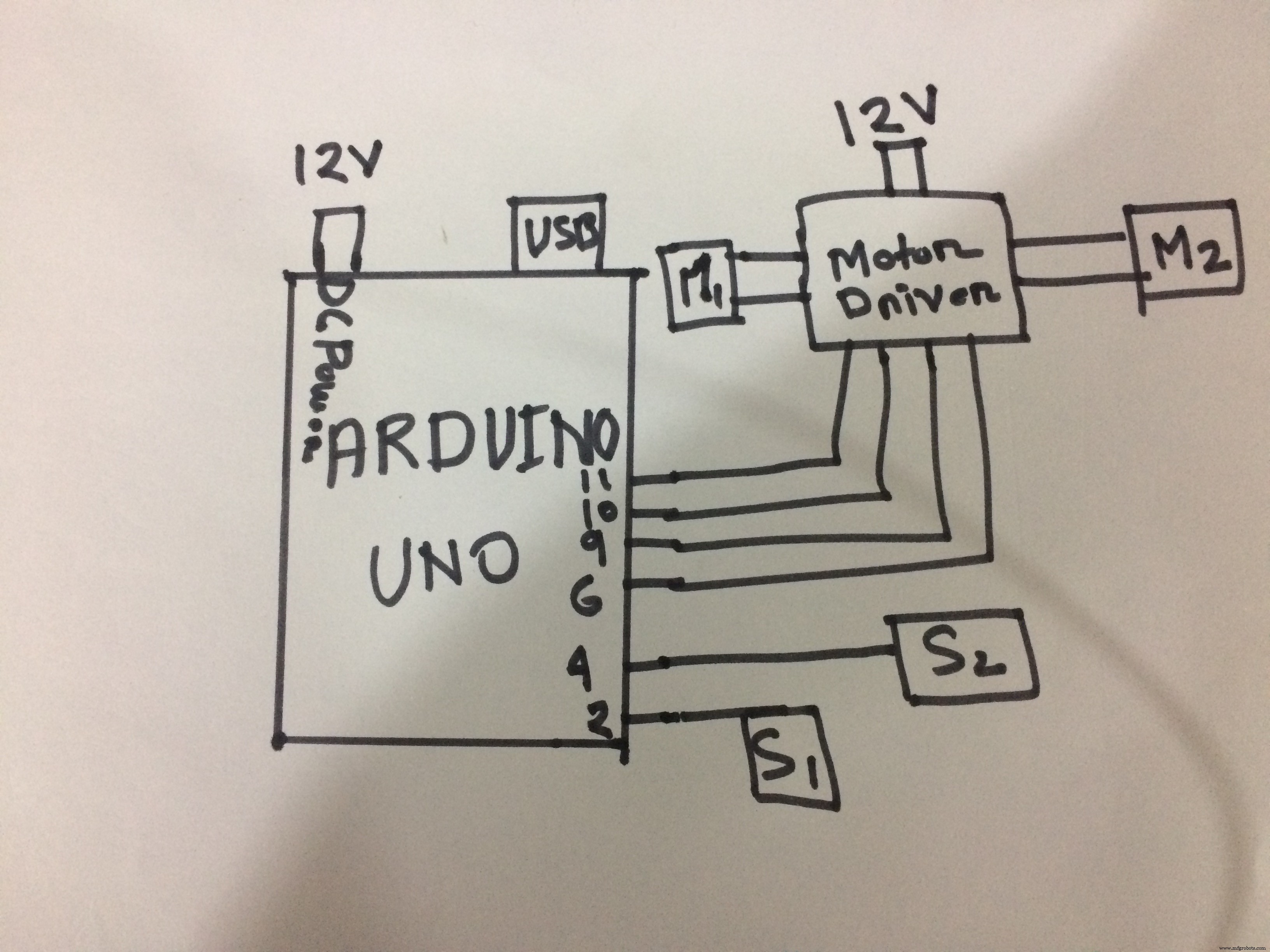
/ * -------入力の定義------ * /#define LS 2 //左センサー#defineRS 5 //右センサー/ * -------出力の定義- ----- * /#define LM1 11 //左モーター#define LM2 10 //左モーター#define RM1 9 //右モーター#define RM2 6 //右モーターvoidsetup(){pinMode(LS、INPUT); pinMode(RS、INPUT); pinMode(LM1、OUTPUT); pinMode(LM2、OUTPUT); pinMode(RM1、OUTPUT); pinMode(RM2、OUTPUT);} void loop(){if((digitalRead(LS)==LOW)&&(digitalRead(RS)==LOW))// Condition_1 stop {MoveForward(); } if((digitalRead(LS)==HIGH)&&(digitalRead(RS)==HIGH))// CONDITION-2 FORWRD {Stop(); } if((digitalRead(LS)==LOW)&&(digitalRead(RS)==HIGH))// RIGHT {TurnLeft(); } if((digitalRead(LS)==HIGH)&&(digitalRead(RS)==LOW)){TurnRight(); }} void MoveForward(){analogWrite(LM1、50); analogWrite(LM2、0); analogWrite(RM1、50); analogWrite(RM2、0); delay(20);} void TurnRight(){analogWrite(LM1、0); analogWrite(LM2、60); analogWrite(RM1、60); analogWrite(RM2、0); delay(30); } void TurnLeft(){analogWrite(LM1、60); analogWrite(LM2、0); analogWrite(RM1、0); analogWrite(RM2、60); delay(30);} void Stop(){analogWrite(LM1、0); analogWrite(LM2、0); analogWrite(RM1、0); analogWrite(RM2、0); delay(20);} 回路図
製造プロセス