


Arduino Sonar
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 |
このプロジェクトについて
HC-SR04のレーダー画面の視覚化
Arduinoコード:
処理によって取得されるシリアルポートに送信されたサーボ値によって移動されたすべての角度のセンサー読み取り値を送信します
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Arduino/Arduino_radar_server_arduino/Arduino_radar_server_arduino.ino
処理コード:
HC-SR04が上から見た領域をマップします。 1つは左から右、もう1つは右から左の2つの読み取り値を取得して表示します。 2つの測定値の平均を表示します
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Processing-code/Arduino_radar_client_processing/Arduino_radar_client_processing.pde
どんな質問でも大歓迎です!
Github:https://github.com/faweiz
ポートフォリオ:https://portfolium.com/faweiz
Linkedin:https://www.linkedin.com/in/faweiz
コード
- 無題のファイル
無題のファイル Arduino
/ * https://www.hackster.io/faweiz/arduino-radarRadarHC-SR04の画面視覚化シリアルポートに送信されたサーボ値によって移動されたすべての角度のセンサー読み取り値を送信して、処理によって取得されます* /#include#include #define TRIGGER_PIN 2 //超音波センサーのトリガーピンに接続されたArduinoピン2#defineECHO_PIN 3 //超音波センサーのエコーピンに接続されたArduinoピン3#defineMAX_DISTANCE 150 // pingする最大距離(センチメートル単位)。最大センサー距離の定格は400〜500cmです。#defineSERVO_PWM_PIN 9 //サーボをArduinoのピン9に設定//意味-angle .. angle#define ANGLE_BOUNDS 80#define ANGLE_STEP 1 int angle =0; //サーボの移動方向//-1 =戻る、1 =進むintdir =1;サーボmyservo; NewPingソナー(TRIGGER_PIN、ECHO_PIN、MAX_DISTANCE); void setup(){Serial.begin(9600); //シリアルポートを初期化します:myservo.attach(SERVO_PWM_PIN); //サーボをArduinoのピン9に設定} void loop(){delay(50); //角度は-ANGLE_BOUNDS .. ANGLE_BOUNDSからであるため、//正の値に再正規化する必要があります。//サーボ値は正である必要がありますmyservo.write(angle + ANGLE_BOUNDS); //センサーからの距離を読み取り、シリアルに送信getDistanceAndSend2Serial(angle); //角度を計算するif(angle> =ANGLE_BOUNDS || angle <=-ANGLE_BOUNDS){dir =-dir; }角度+ =(dir * ANGLE_STEP); } int getDistanceAndSend2Serial(int angle){int cm =sonar.ping_cm(); Serial.print(angle、DEC); Serial.print( "、"); Serial.println(cm、DEC); }
コード
https://github.com/faweiz/My-Arduino/tree/master/arduino_radarArduino_radar_server_arduino.ino
Arduino_radar_client_processing.pde
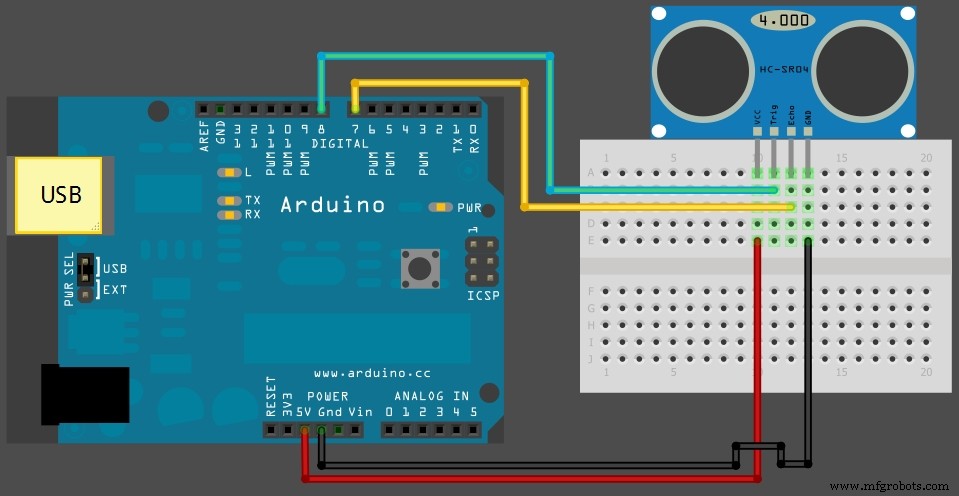
回路図
製造プロセス