


産業用ロボットの種類とそのさまざまな用途
多くの種類の産業用ロボットとその独自の機能をご覧ください。ロボットアーム、移動ロボット、空中ドローン、水中ロボット、コボットなど、今日の各タイプのロボットの用途と用途を明確に理解してください。
どのタイプの産業用ロボットが適切かをどのように判断しますか?
市場には非常に多くの種類のロボットがあります。どの種類のロボットを使用するかをどのようにして知ることができますか?多くの設計やエンジニアリングの問題と同様に、「形態は機能に従う」。つまり、どのタイプのロボットが必要かは、その目的の機能によって異なります。ロボットは床やその他の表面に固定されますか、それとも移動可能である必要がありますか?ロボットは1時間あたり何ユニットを処理できなければなりませんか?ロボットが持ち上げなければならない最大重量はいくらですか?ロボットが一箇所に固定されている場合、作業用封筒のサイズはどのくらいですか?作業用封筒は長方形ですか、それとも円形ですか?これらの質問に答えることで、選択肢がすばやく絞り込まれ、目的に合った産業用ロボットの理想的なタイプを選択できるようになります。
この記事では、さまざまな種類のロボット、それらの長所と短所、およびそれらを何に使用するかを決定する方法を検討します。
この記事の内容
- 静止ロボット(ロボットアーム)
- 自律移動ロボット
- 飛行ロボット(空中ドローン)
- 水中ロボット
- 組織に最適なロボットタイプを調達する方法
静止ロボット(ロボットアーム)
市場に出回っている固定ロボットには主に7つのタイプがあります。静止しているとは、床、天井、またはその他の表面にボルトで固定されているロボットを意味します。ロボットは移動できません。一般に、静止ロボットは、ピッキングと配置、並べ替え、組み立て、溶接、仕上げなどのタスク用に設計されたロボットアームです。
ここでは、さまざまなタイプのロボットアーム、およびそれらの特性と用途について検討します。
- 多関節ロボットアーム
- デカルトまたは長方形のロボット
- スカラロボット
- 極性ロボットまたは球形ロボット
- デルタまたはパラレルロボット
- ガントリーロボット
- 円筒形
- 協働ロボット/コボット
多関節ロボットアーム
利点: すべてのロボットアームタイプの中で最も柔軟な動き。非常に強力で、重い物を持ち上げることができます。
短所: フェンスで囲う必要があるかもしれません。他のいくつかのロボットアームよりも遅い。他のロボットアームよりも高価です。より洗練された制御システムが必要です。
他のタイプのロボットアームと比較すると、多関節ロボットアームの動きは人間の腕に最もよく似ています。典型的な関節アームには、6つの軸またはジョイントがあります。アプリケーションやメーカーによっては、それより少ない場合も多い場合もあります。ロボットの関節が多いほど、ロボットの動きは滑らかになり、「ロボットのような」ものではなくなります。この動きの柔軟性は、自由度によって説明されます。
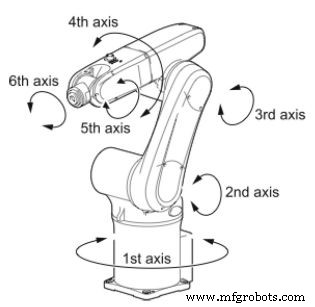
興味深い事実: 人工の手の設計者は、人間の手には27の自由度があると考えています。人間の腕には7自由度があり、人間の腕と手の合計は34自由度です。
人間の腕と手が動くことができる微妙な方法のすべてを複製するには、産業用ロボットには費用がかかり、複雑になります。産業用ロボットアームの6自由度は、必要なほとんどすべてのタスクを実行するのに十分であることが一般的に認められています。
ロボットはピアノを弾くことができなくなりますが、弾く必要はありません。
用途によっては、ロボットアームに手に相当するグリッパーが装備されている場合があります。通常、ロボットグリッパーは人間の手よりもはるかに単純です。吸盤や電磁石のように単純な場合もあります。または、おそらく3本の指の柔らかいグリッパーを使用して、新鮮な農産物や卵などの繊細な物体を拾うこともできます。グリッパーにはさまざまな種類があり、すべてのアプリケーションを処理できる単一のロボットグリッパーはまだ見つかっていません。
あるいは、エンドオブアームツーリング(EoAT)と呼ばれるものは、ある種のツール、おそらくドリルビットを保持する回転ツール、またはバリ取り、研削、またはフライス盤用の他の種類のビットにすることができます。溶接、塗装、サンディング、レーザー切断などに特化したEoATを含む、多くの可能性があります。
多関節ロボットは、直線でしか移動できない直線または並進の関節とは対照的に、すべての関節が回転できるため、柔軟性が高くなっています。
多関節ロボットは、ピックアンドプレース、アーク溶接、スポット溶接、パッケージング、機械の手入れ、マテリアルハンドリングなどのアプリケーションで使用されます。手の届きにくい場所でアーク(または同様のパターン)を生成する機能により、多関節ロボットは、この機能を必要とする自動車産業やその他の製造業に適した候補になります。
歴史的に、1トン以上の重さの物体を拾うことができる大きくて強力な関節式アームロボットには、環境を認識できるセンサーが装備されていませんでした。そのようなロボットの邪魔をすると、重傷を負ったり、死亡する可能性があります。
結果として、そのようなロボットアームはそれら自身の空間に分離される必要があります。ロボットの機能を完全に理解している資格のある担当者のみが、そのようなロボットが動作する壁で囲まれた、またはフェンスで囲まれたスペースに入ることができます。
ただし、多関節ロボットアームに適切なセンサーと制御ソフトウェアが装備されていれば、人の周りで安全に動作できます。たとえば、カメラまたはおそらくLiDARセンサーでコンピュータービジョンを使用している場合、そのようなロボットが、何かが動きの経路の邪魔になっていること、または人や物体が近づいていてまだ邪魔になっていないことを感知した場合、ロボットは速度が低下したり停止したりする可能性があります。他のセンサーは衝突を検出できます–腕が何かにぶつかると、停止したり、コースを逆にしたりします。通常、人と一緒に安全に操作できる関節式アームは、速度と強度が制限されるように設計されています。
デカルトまたは長方形のロボット
利点: シンプルな制御システム。モデルによっては、非常に重い物体を持ち上げることができます。正確。 3つの軸すべてで剛性があります。関節式アームよりも安価です。
短所: 回転運動はできません。
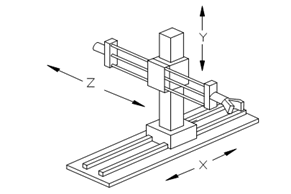
これらのロボットは、デカルト座標系(X、Y、およびZ)を使用して、3つの軸(前後、上下、および左右)に沿った線形運動を行います。 3つの関節はすべて並進運動です。つまり、関節の動きは直線に制限されます。このため、このようなロボットは「線形」ロボットとも呼ばれます。
デカルトロボットは、ピックアンドプレース、マテリアルハンドリング、パッケージングの自動化、保管と回収、切断と穴あけ、その他多くのアプリケーションに使用できます。
それらは3次元すべてで剛性があり、非常に正確で再現性があります。これらは多関節ロボットアームよりもシンプルで、ソフトウェア制御もシンプルで、アプリケーションによっては安価になる可能性があります。
ガントリーロボット-デカルトロボットの一種
利点: モデルによっては、非常に重い物体を持ち上げることができます。必要に応じて、施設の全長にわたって非常に大きくすることができます。適切なアプリケーションに対して非常に費用対効果が高い可能性があります。
短所: 回転運動はできません。

デカルトロボットまたは線形ロボットは、ガントリーロボットとして構成できます。ガントリーロボットは頭上のトラックに沿って移動します。ガントリーロボットは、その設計に応じて、非常に重い負荷を処理し、すばやく正確に動かすことができます。また、必要に応じて、施設の床面積全体をカバーするように非常に大きくすることもできます。小型のガントリーロボットは、高精度と優れた剛性を伴うピックアンドプレースやその他の操作に役立ちます。
リニアロボットのモーションコントロールの側面は比較的単純であるため、他のタイプのロボットよりも低コストであることが多く、多くの自動化タスクに対して非常に費用効果の高いソリューションになる可能性があります。
デカルトロボットの作業範囲は長方形です。垂直方向の動きを追加すると、作業エンベロープがボックスの形になります。
スカラロボット
利点: 多くのアセンブリアプリケーションに最適です。高速かつ正確。組み立て作業に費用効果があります。
短所: 関節式アームほど柔軟ではありません。デカルトアームほど正確ではありません。 Deltaロボットアームほど速くはありません。
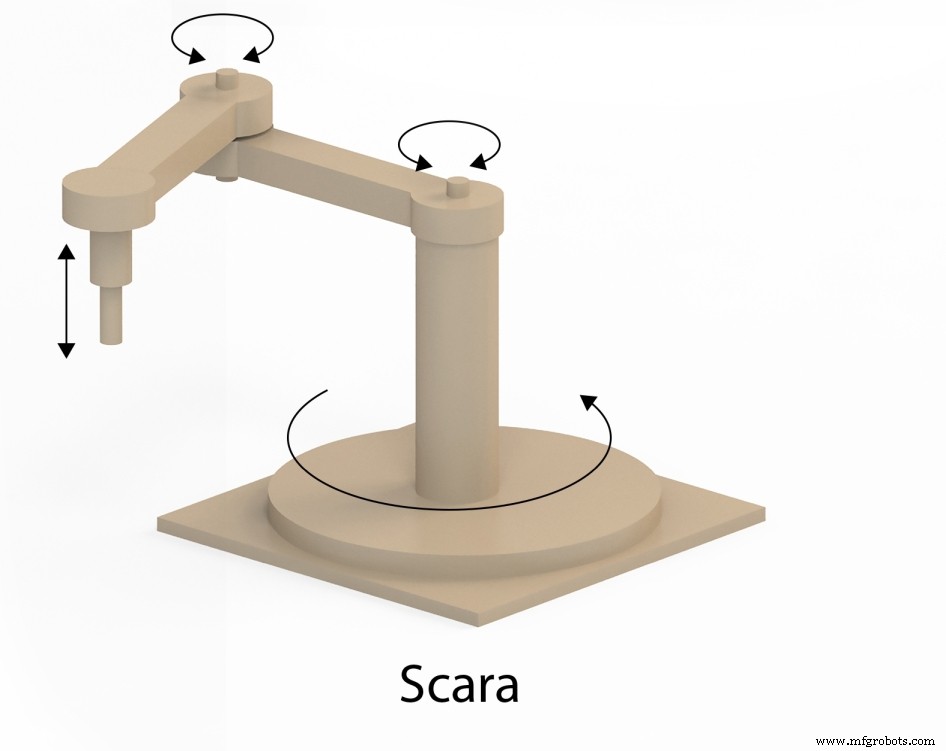
スカラロボット(セレクティブコンプライアンスアセンブリロボットアーム)は、3つのジョイントまたは軸で移動するという点でデカルトロボットに似ています。ただし、デカルトロボットとは対照的に、スカラロボットの2つの関節は回転しています。したがって、デカルトロボットよりも複雑な動きが可能です。それらは一般的に高速で、動きの柔軟性がありますが、デカルトロボットよりも精度が低くなります。
興味深い事実: スカラロボットの普及は、小型電子産業に革命をもたらしました。設置面積が小さく、シンプルで、設計上の特徴があるため、このアプリケーション分野に非常に適しており、費用対効果が非常に高いことが証明されています。
名前の「アセンブリ」が示すように、スカラロボットアームはアセンブリアプリケーション用に発明されました。スカラロボットは、1981年に山梨大学の牧野宏によって作成されました。名前の「コンプライアンス」とは、ある程度の「与える」ことを指します。つまり、スカラロボットを水平面に押し込むと、少しだけ動きます。完全に剛性ではありません。ただし、垂直面では、スカラロボットは非常に剛性が高く、この方向に押しても「与える」ことはありません。したがって、「選択的」コンプライアンスを備えています。垂直面ではなく、水平面で準拠しています。
選択的コンプライアンスは、たとえば、部品を回路基板に挿入する必要がある組み立て作業で非常に役立ちます。この種のアセンブリでは、多くの場合、部品を穴に合わせる必要があります。パーツを穴の中心に配置するには、中心点を見つけるために少しの「コンプライアンス」が必要になることがよくあります。少し揺れるか、少し「与える」必要があります。次に、下向きに移動する挿入力は、しっかりと固定されている必要があります。
スカラロボットは、デカルトロボットよりも剛性が低く、非常に重い物体を持ち上げることができるデカルトロボットと比較して、持ち上げることができる重量にも制限があります。スカラロボットは設置面積が小さく、移動距離が比較的短い用途に一般的に使用されています。関節式アームよりも自由度が低くなります。一方、それらは精度が高く、非常に再現性があります。そして、それらは関節式アームよりも安価です。
スカラロボットの作業範囲は円筒形であり、用途を検討する際の考慮事項でもあります。スカラロボットは、デルタロボットほど高速ではありませんが、一般的に関節アームよりも高速です。
極性または球形のロボット
利点: 関節式アームよりもシンプルな制御システム。長いリーチを持つことができます。多くの溶接用途に非常に適しています。関節式アームよりも速い場合があります。
短所: 多関節ロボットアームほど柔軟ではありません。古いテクノロジー。多くの場合、かなり大きなフットプリントが必要です。デルタアームほど速くはありません。
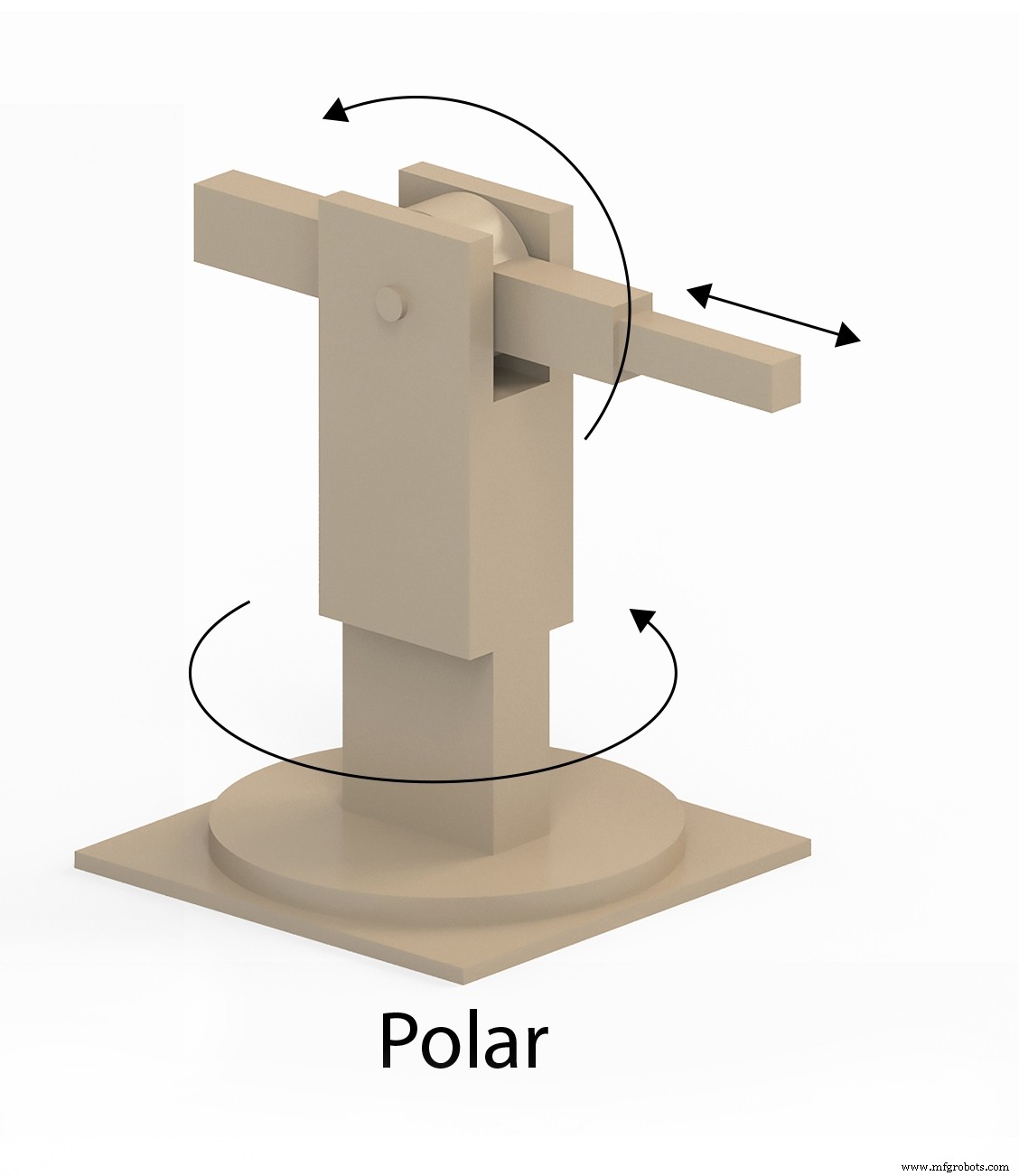
極地ロボット(球形ロボットと呼ばれることもあります)は、2つの回転関節と1つの線形関節の組み合わせを特徴としています。彼らのデザインは球形の作業スペースを作成します。
興味深い事実: 「ユニメート」と呼ばれる最初の産業用ロボット(1950年代に作成された)は、球形のロボットでした。
Polarロボットは、射出成形、塗装、アーク溶接、スポット溶接に使用できます。適切なサイズのリニアアームを装備すると、リーチが長くなります。
極地ロボットは古い技術であり、関節式アームロボット(球形の作業範囲もあります)に置き換えることができますが、一部のアプリケーションでは、極地ロボットは他のロボットよりも費用効果が高い場合があります。
デルタロボット
利点: ピックアンドプレース操作用のロボットアームの最速設計。軽量。正確。
短所: 比較的小さくて軽量なオブジェクトに限定されます。垂直面のオブジェクトでの作業には適していません。リーチが限られています。
デルタロボット (パラレルロボットとも呼ばれます)は、平行四辺形の形をした3つのロボットアームを備えています。通常、デルタロボットはワークピースの上に配置され、頭上の架台に取り付けられます。すべてのモーターがベース上にあるため、ロボットのジョイントとアームは他のロボットと比較して非常に軽量です。 Deltaロボットには、逆さまのドーム型の作業エンベロープがあります。
興味深い事実: Deltaロボットは元々、チョコレートメーカーがチョコレートを取り出して箱に入れることができるように設計されていました。

Deltaロボットの設計により、高速で正確な操作が可能になります。デルタロボットは、主にピックアンドプレースアプリケーションで使用されます。追加のアプリケーションには、接着剤のディスペンス、はんだ付け、および組み立てが含まれます。 Deltaロボットは重いペイロードを運ぶことができないため、End of Arm Tooling(EoAT)のタイプとそれらが処理できるタスクが制限されます。
Deltaロボットのハイブリッド設計では、動作の柔軟性を高めるために、アームの端に回転ジョイントを配置することがあります。
円筒形ロボット
利点: リジッド。正確。円形の形状を必要とするアプリケーションに最適です。
短所: 古いテクノロジー。動きの制限された柔軟性。
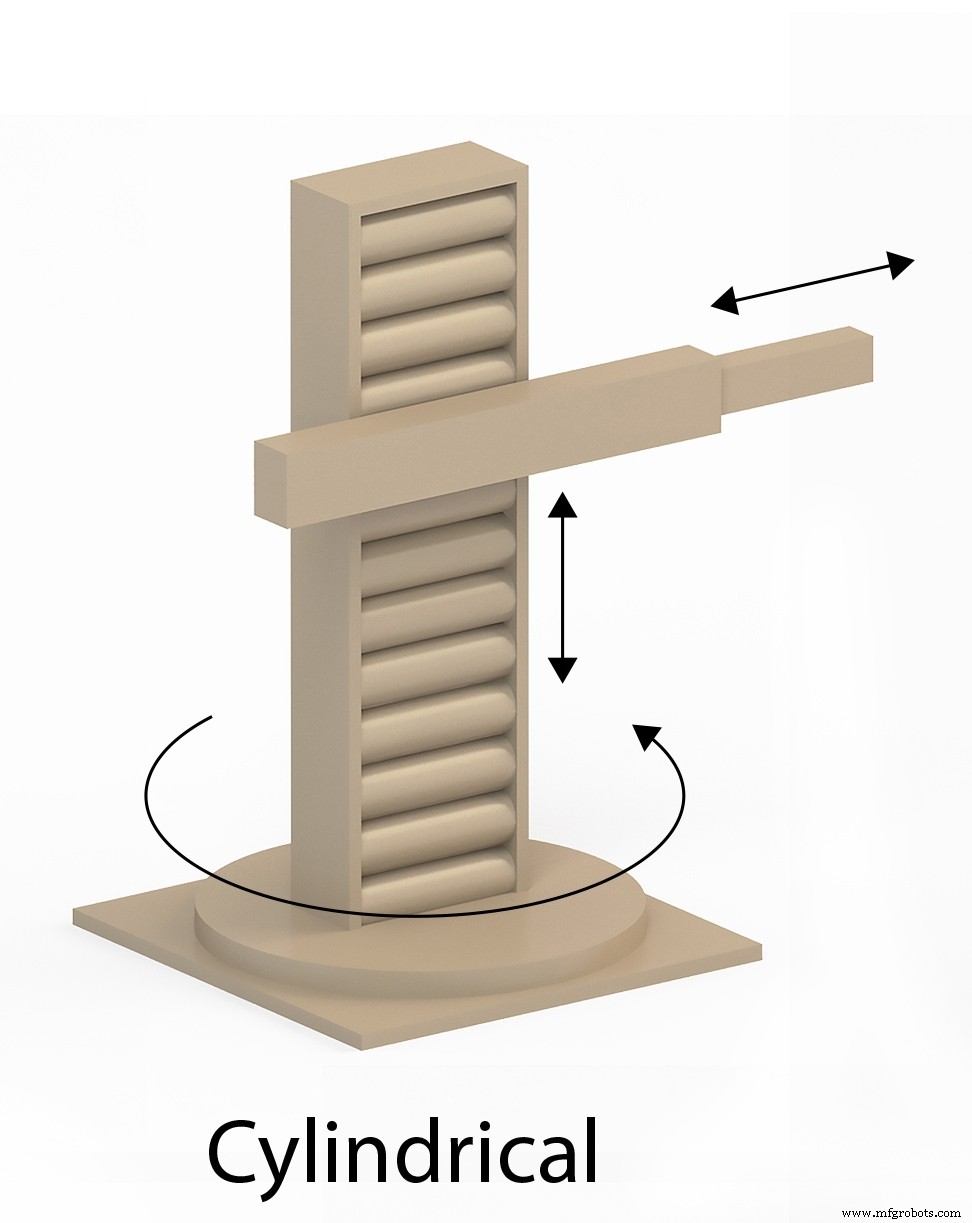
円筒形ロボット ベースに少なくとも1つの回転ジョイントと2つの線形ジョイントがあります。このデザインは、円筒形のワークスペースにつながります。
円筒形ロボットは通常、狭い作業スペースで使用され、円対称である必要があるオブジェクト(ワイヤー、パイプなど)に最適です。研削、組み立て、およびスポット溶接のアプリケーションでは、円筒形のロボットを利用します。
協働ロボット(コボット)
利点: 人と一緒に安全に作業できます。最新のインターフェースでは、コードを記述せずにロボットアームに何をすべきかを「教える」ことができます。
短所: 常に最速の種類のロボットアームとは限りません。強度と速度に制限があります。
協働ロボット(コボット)は、従来の産業用ロボットアプリケーションで採用されていたフェンスやその他の安全対策を必要とせずに、安全な作業環境で人間とロボットの相互作用を可能にします。ただし、安全対策により動作速度が低下します。

人間と一緒に安全に操作できることは別として、コボットをより協調的にする機能の1つは、プログラミングコードを記述せずに、ロボットアームに動作を教えるオペレーターの機能です。オペレーターはロボットアームをつかみ、ロボットが進む必要のある方法で物理的に動かします。その後、ロボットアームは、実証された動きを再現できます。
標準のコボットは通常、非常に重い物体を処理するようには設計されていません。これにより、管理できる製品の範囲が制限されます。
協働ロボットには、機械の手入れ、ピックアンドプレース、組み立て、アーク溶接などの幅広い用途がありますが、通常、頑丈な用途や非常に高速な作業には適していません。
自律移動ロボット

AMRまたは自律移動ロボットは、産業用ロボット市場の急速に成長しているセグメントを表しています。それらは多くの形とサイズで提供され、実行するように設計されたタスクに最適化されています。
ホイールカート
カートまたは車輪付き車両の形のAMRは、通常、工場または倉庫施設内で商品を輸送するために使用されます。センサー、オンボードコンピューティングパワー、および電気モーターを備えており、施設内を移動して内部マップを作成できます。これは多くの場合、AMRを追跡し、リモートコントロールで誘導する人によって行われます。
内部マップが作成されると、AMRは移動先の目的地について指示を受けることができます。 AMRの重要な機能は、ある場所から別の場所に独立して(「自律的に」)移動でき、途中の障害物を回避できることです。人、フォークリフト、またはその他の物体が邪魔をしている場合は、障害物を回避するために曲がったり、目的地までのまったく新しいルートを計画したりすることができます。
AMRの自律機能により、コンベヤーシステムと比較して非常に柔軟になります。
車輪付きカートの形のAMRは、商品を輸送するために個別に使用できます。また、群れまたはロボットの艦隊の一部として使用することもできます。たとえば、AMRのフリートはAmazonによって使用されます。アマゾンは、いわゆる「商品から人へ」の構成を使用しています。この構成では、各ロボットが商品の棚全体を受け取り、注文ピッキングステーションで人に届けます。次に、その人は棚から製品を選び、eコマースの注文処理用のコンテナに入れます。
最近、コンピュータービジョン、人工知能、およびグリッパーテクノロジーの進歩により、ピッキングステーションの人を多関節ロボットアームに置き換えることが可能になりました。この場合、車輪付きカートAMRは、ロボット間のコラボレーションのために、商品をロボットアームに運びます。
無人搬送車(AGV)
AGVは通常、車輪付きの車両の形をしており、AMRよりも古い技術です。オンボードインテリジェンスが少ないため、AMRほど自律的ではありません。 AGVには、施設の地図を作成する機能はありません。代わりに、彼らは彼らのために定められた道に依存しています。パスは、床に配置されたワイヤー、特殊なテープ、または他の種類のガイドによって定義されます。 AGVがその経路で障害物に遭遇した場合、AGVは停止して助けを求めることしかできません。
ただし、AGVとAMRの区別はますます曖昧になっています。 AGVには、より多くのオンボードコンピューティング能力が与えられており、一部のAGVには、経路上の障害物を回避する機能があります。
ロボットアームを備えたAMR
ロボットアームは、車輪付きカートAMRの上に取り付けることができます。これにより、ロボットの柔軟性と実行できるさまざまなタスクが向上します。 1つのアプリケーションは、このようなロボットを使用して、工作機械の列全体を手入れすることです。ロボットは、完成した部品をアンロードし、新しいブランクワークピースを1台のマシンにロードしてから、列を下に移動して、一連のマシンに対して操作を繰り返すことができます。
脚式ロボット
何百万人もの人々がボストンダイナミクスによって作られたダンスロボットのYouTubeビデオを見たので、2本足と4本足のロボットを見てきました。脚を備えたロボットの1つの産業用途は、小包配達のためにそれらを展開することを想定しています。もう1つの使用例は、捜索救助活動です。
車輪の代わりに脚を使用することには、特定の利点があります。脚を使用すると、ロボットは、車輪付きのカートでは困難または不可能と思われるある種の地形を移動できます。脚は階段を上ることを可能にし、車輪付きのカートよりも簡単に車両に乗り降りできます。
球形AMR
球形の自律移動ロボットは市販されており、他のフォームファクターに比べて特別な利点があります。球形のAMRのシステムコンポーネントは、耐久性のあるシェルの内側に密閉されています。これにより、過酷な環境での動作が可能になります。彼らはまた、浮いて水の上を移動することができます。球形AMRは水陸両用であり、水上と陸地の両方を移動します。
球形AMRの推進システムは、最も一般的には重心のシフトに基づいています。
球状AMRの産業用アプリケーションは、主に監視と遠隔検査です。カメラと通信を備えており、リモートオペレーターにビデオを送り返すことができます。有毒ガスやその他の危険な状態が発生する可能性のある敵対的な環境では、球形のAMRが理想的です。
フライングロボット(空中ドローン)
無人航空機(UAV)またはドローンは、さまざまな産業目的でますます使用されています。 1つのアプリケーションは、倉庫でドローンを使用して在庫を取得することです。ドローンは倉庫の通路を飛んで、コンピュータービジョンを使用して、棚のボックス内のアイテムの数を数えることができます。

一部のモデルは障害物を自動的に検出して回避し、目的地まで独立して移動できるため、設計によっては、産業用ドローンは一種の自律移動ロボット(AMR)になる場合があります。一部の産業用ドローンには、ストリップマイニング操作またはインフラストラクチャプロジェクトの上空を飛行することで構成される「ミッション」を与えることができます。ドローンはその任務を自律的に飛行し、プロジェクトのビデオを録画したり、特定の測定を行ってそれらを録画したりすることができます。このようなドローンは、建設プロジェクトの進捗状況を監視するために使用できます。
アマゾンや他の企業は、耐久消費財や食料品の配達にドローンをすでに限定的に使用しています。
水中ロボット

水中で使用するように設計されたロボットは多種多様です。一部の水中ロボットは自律型(自律型水中ビークル-UAV)として設計されており、一部はワイヤレスまたは有線テザーを使用してリモート制御されるように作られています。一部の水中ロボットは、潜水艦と同様に、推進システムとしてプロペラを使用します。一方、そのようなロボットの多くは、生き物の推進力を模倣しています。イルカの行動を模倣するものもあれば、ヘビを模倣するものもあり、魚のように動くものもあります。このように自然を模倣することは、ロボットの動作が生物を模倣するため、「生体模倣」と呼ばれます。
水中ロボットは、海上石油プラットフォーム、パイプラインの検査、および科学研究に使用できます。他のアプリケーションには、水中ロボットを使用して橋の底を検査し、水力発電ダムの取水口を検査し、サンゴ礁を検査することが含まれます。
水中ロボットは、証拠を探すために水域の底のビデオ録画を撮るために警察によって使用されています。軍隊も水中ロボットに興味を持っています。ソナーシステムは、ロボットの「イルカ」と実際のイルカの違いを教えてくれますか?
水中ロボットの利点はたくさんあります。そのようなロボットは、人間のダイバーのリスクと費用を負担する必要がないことを意味します。ロボットは人よりも長く水中にとどまることができます。水中ロボットにセンサーを装備することで、ほぼ無限の数と種類のプロパティを測定および記録できます
組織に最適なロボットタイプを調達する方法
HowToRobotは、企業が自動化で成功するのを支援するグローバルプラットフォームです。 15,000を超えるロボット企業のHowToRobotワールドワイドディレクトリを使用することで、アプリケーションに最適な、必要なタイプのロボットを見つけることができます。
必要なロボットのタイプがすでにわかっていて、ロボットベンダーからより多くの情報を入手したい場合は、HowToRobotを介して見積もりを取得し、複数のベンダーから製品情報と価格を受け取ることができます。
必要なロボットコンポーネントまたは部品の種類がわからず、アプリケーションと、自動化によって達成したい主要業績評価指標(KPI)および目標のいくつかを簡単に説明したい場合は、情報の要求を送信できます。ソリューションに関する情報を提供できるベンダーからの回答を受け取ります。
プロセスのナビゲートを支援できる公平なHowToRobotエキスパートがいることに注意してください。エキスパートアドバイザーとの協議を設定するには、ここをクリックしてください。
産業用ロボット