


精度VS再現性VS解像度:産業用ロボットの違いは何ですか?
出典:計測学。ニュース
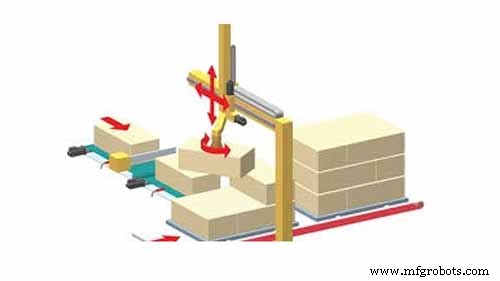
産業用ロボットは急速に勢いを増しており、さまざまな業界のさまざまなメーカーに採用されています。これは主に、人間の努力に頼るよりも効率的で作業が簡単になるためです。これらの産業用ロボットは、梱包、仕分け、ピッキング、配置などのタスクが正しく行われるようにするために使用されます。
メーカーとして、産業用ロボットは生産を改善し、すべての製品が標準に達していることを確認するための優れた方法です。ただし、産業用ロボットに関しては、留意する必要のあるいくつかの側面があります。それらのいくつかには、精度、再現性、および解像度が含まれます。これらの側面は、産業用ロボットの実行をより簡単かつ迅速にするのに役立ちます。それらについてもっと学ぶことは、メーカーとしてあなたがそれをあなたのために働かせることができることを確実にするための素晴らしい次のステップです。 出典:www。 machinedesign.com
精度とは、手首の端を作業ボリューム内の目的のターゲットポイントに配置するロボットの能力を指します。空間分解能と連動して機能します。精度は、ロボットテクノロジーと、制御増分をどれだけ厳密に指定できるかに依存します。これは、各関節の動きに適用されます。ただし、現時点でのロボットの出力品質に関連する機械的な不正確さは除外されます。 出典:計測学。ニュース
精度は、コントロールの解像度の半分として説明されます。これは、ターゲットポイントが2つの制御ポイントの間に直接あるという最悪のケースを考慮に入れています。統計的分布を伴う機械的不正確さは、より実際的な考慮が必要です。その場合、精度は空間分解能の半分として分類されます。
ロボット工学では、精度は解像度や再現性と混同されることがよくあります。ロボットシステムの最終的な精度は、いくつかの要因に依存します。それらには、その技術的な不正確さ、コンピューター制御のアルゴリズム、およびシステムの解像度が含まれます。 出典:www。 iotworldtoday.com
機械的な不正確さは、主にマニピュレータのジョイントのバックラッシュとタイの曲がりによって引き起こされます。バックラッシュは、ギアメカニズム、親ねじ、および油圧ドライブアクチュエータに見られます。リンクの重要な設計要件は、リンクの曲がりを最小限に抑えることです。これは、ロボットの端の負荷によるリンクのたわみが位置エラーを引き起こすためです。ただし、質量を大幅に増やすことでは、関係の剛性を高めることはできません。
質量が大きくなると、腕の時間応答が増加します。コンピューターの丸め誤差が原因で、制御アルゴリズムが位置エラーを引き起こす可能性があります。ロボットコントローラがデカルト座標と角度座標のスケーリングされた整数表現を使用する場合、機械の丸め誤差が重要になる可能性があります。コンピューターで浮動小数点表現が使用されている場合、丸め誤差はおそらく無視できます。 出典:www。 forbes.com
精度は外部変数にも影響されます。拡張構成を使用すると、それは手首のポイントでより意味のあるものになります。基礎のアームの最も近い位置から、作業量内で精度が低下します。その後、作業量の範囲を超える場所に転送されます。
モーションサイクルが限られた作業範囲に制限されている場合、精度は向上しますが、ロボットが負担する負荷が大きくなると精度は低下します。場所の精度は、ワークスペースのエンベロープ内の位置によって異なります。
この目的のために、センサーを使用せずに、ロボットのオフラインプログラミングを行うことは困難です。精度に影響を与える位置エラーの原因を、デジタル化エラー、確率的キネマティックエラー、決定論的キネマティックエラー、およびキャリブレーションエラーを含む4つのグループにグループ化することができます。
組み立てロボットの軸はほとんど垂直であるため、外部の影響や機械的な不正確さの影響が少ないため、精度はわずかに向上します。ただし、ペグインホールなどの特定の部品嵌合アプリケーションを問題なく実行するには、これだけでは不十分です。 出典:ein。 org.pl
解像度は、コンピューターが生成できる動きの最小の改善です。機械はデジタルコントローラーとディスクリートフィードバックモーターを使用するため、分解能はすべての動きが行われる量です。デバイスの制御解像度がnの場合、すべての動きはnの整数倍です。
これは、解像度がスキームの中で最も低い部分であるということではなく、むしろ最も高いということではありません。フィードバックエンコーダーの正確な分解能が1マイクロメートルしかない場合、0.1マイクロメートルの動きを測定できるコンピューターコントローラーでは、機械を正確にシフトして0.1マイクロメートル上げることはできません。
制御システムは、そのような小さな動きを「見る」ことは決してありません。したがって、マシンの出力統計を解釈する際には、非常に注意する必要があります。 出典:www。 linearmotiontips.com
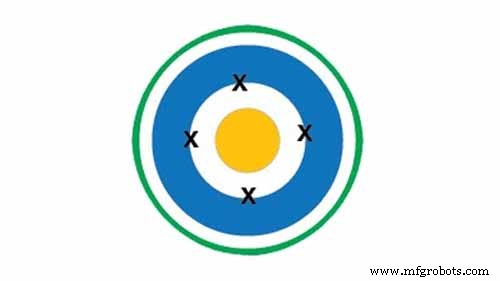
再現性は、ポイントがどのように複製されるかを説明する精度に関連する数学的概念です。ロボットの関節が特定の点から数回シフトするようにプログラムされている場合は、同じ角度でそれを行うことができます。それはすべて同様の環境条件下で行われ、その結果、変位が異なります。
目標を大幅に逃すことがよくありますが、同じミスを繰り返すと再現性が高く、精度が低いと結論付けます。絶対座標に関する誤差は、再現性によって定義されません。変位の平均からの位置偏差は、デバイスの再現性です。
ロボットのほとんどのメーカーは、ロボットの精度ではなく、ロボットの再現性の数値を提供しています。その理由は、精度はグリッパーが運ぶ特定の負荷に依存するためです。重量が重くなると、ロボット接続のたわみが大きくなり、関節にかかる負荷が大きくなり、精度が低下しますが、再現性の値はグリップの値とはほとんど関係ありません。ロボットの再現性は通常、精度よりも優れており、通常は100分の1インチで計算されます。 ソース:コントロール。 com
ロボット工学とこれらの側面の適用に関しては、それらが常に一緒に優れていることがわかります。精度、再現性、解像度を組み合わせることで、産業用ロボットは正確に動作し、タスクが適切に実行されるようになります。ピックアンドプレースアームを使用する場合、これらの側面はプロセスを容易にするのに役立ちます。メーカーとして、より簡単なエクスペリエンスのために、これらすべてのボックスがチェックされていることを確認することが重要です。
精度
再現性
解決策
精度により、ロボットの手首が正しく配置されます
再現性とは、タスクを簡単に繰り返し実行できるようにすることです。
解像度は、このプロセス中に微調整を行って、精度が適切であることを確認するのに役立ちます
これを念頭に置いて、ロボットデバイスがこれらの重要な側面を備えていることを確認することが重要です。すべての作業が正しく行われ、生産プロセスが向上することを保証するためのより良い立場になります。
産業用ロボットに関しては、さまざまな製造プロセスの開発において大きな役割を果たしています。それらは、生産量を確実に増やすために重要な驚くべき利点を提供します。ただし、これを最大限に活用するには、精度、再現性、解像度などの重要な側面を使用することが重要です。
前に説明したように、産業用ロボットのメリットを最大限に活用するには、これらの側面を運用に組み込む必要があります。メーカーとして、あなたに求められているものと調和することが不可欠です。時間をかけて、これらの側面と、ロボット技術を使用する際の意味を学びましょう。
ロボット工学の精度とは何ですか?

機械的な不正確さの原因は何ですか?


ロボット工学の解像度とは何ですか?
ロボット工学の再現性とは何ですか?
ロボットのさまざまなアプリケーションにおける精度、再現性、解像度の役割

結論
産業用ロボット