


Robotics Singularity:RoboticArmsとは
出典:www。 idtechex.com
製造業でのロボットアームの使用は増加しており、ロボットアームを使用するメリットを享受する企業が増えています。ロボットアームをビジネスプロセスに組み込むことを計画している場合は、十分な情報を得ていることを確認する必要があります。質の高い結果を得るために協力できる高品質のロボットアームメーカーを探してください。
ロボットアームは、ボディ、手首、およびエンドエフェクターを備えています。エンドエフェクタは、さまざまな製品を保持したり、さまざまなタスクを実行したりするために使用されるものです。ほとんどの場合、エンドエフェクタをさまざまな方向に正確に移動する必要があります。これは、ロボットの特異点と、それがロボットアームのパフォーマンスにどのように影響するかを認識していることを確認する必要がある場所です。この記事では、ロボットの特異点と、それを念頭に置くことが不可欠である理由について詳しく説明します。 出典:www。 technologyreview.com
ロボットの特異点とは、ロボットのエンドエフェクタの動きが特定の方向にブロックされる構成を指します。この構成では、作業しているロボットアームの効率と精度が制限されます。一般に、6軸ロボットアームの場合、3Dまたはデカルト平面でX、Y、およびZ軸を基準にして動作します。これは、動作中にロボットアームが経験する6つの自由度に寄与する6つの関節で構成されています。
この自由度により、ロボットアームはさまざまな方向に移動し、設計されたタスクを簡単に実行できます。万が一、ロボットのエンドエフェクタが製品に到達できないか、間違った方向に移動した場合、特異点の問題が発生します。一部の特異点は、識別と解決が非常に簡単で、自分の場所に戻ることができます。タスク。ただし、一方で、複雑で長い数式を使用しない限り、特異点を特定するのが難しいロボットもあります。 出典:www。 mecademic.com
ロボットの特異点は、さまざまな効果を特徴とし、特に特定の問題を特定するときにも課題になります。これらの課題は、作業するロボットアームに搭載されているいくつかの要因によって異なります。ロボットが経験する特異点の複雑さと重大度は、関節の数、ロボットのタイプ(線形または回転)、および幾何学的配置によって異なります。
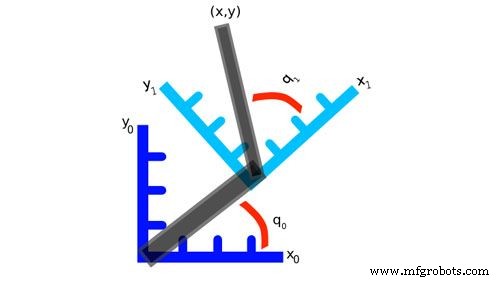
産業用ロボットアームは、簡単に制御できる2つのスペースを備えています。これは通常、ジョイントスペースとデカルトスペースです。ロボットアームが動作するさまざまなスペースで、2セットの位置モードモーションコマンドを備えていることがわかります。
関節スペースコマンドに関しては、ロボットは希望する関節スペースのセットで特定の指示を受け取ります。次に、各関節を移動して、直線的かつ同時の平行移動で提案された関節の位置に移動します。デカルト空間コマンドを使用すると、ロボットへの提案は、特定のデカルトパスを持つエンドエフェクタに必要なポーズを特徴とします。デカルトパスは、線形または円形になるように設計されています。
ロボットがデカルト関節とコマンドに正確に位置合わせするために、ロボットコントローラーはロボットの逆位置と速度の運動学を計算します。これにより、設計されたタスクを実行するためのエンドエフェクタの正しい配置が得られます。ただし、計算が間違っていると、エンドエフェクタが正確に配置されていないことがわかる特異点が発生します。これは、特異点の問題が自動化プロセスを妨げるのを防ぐために避けたい構成を示しています。 出典:www。 dignited.com
産業用ロボットアームが目的のタスクで最高の状態で動作できるようにするには、許可されたロボットの特異点を絶対に避けてください。ロボットの特異点の機能についてさらに学ぶことで、それを回避することを目指すべき理由をよりよく理解することができます。ロボットの特異性は、主に2つの異なる機能に関連しています。 出典:studywolf。 wordpress.com
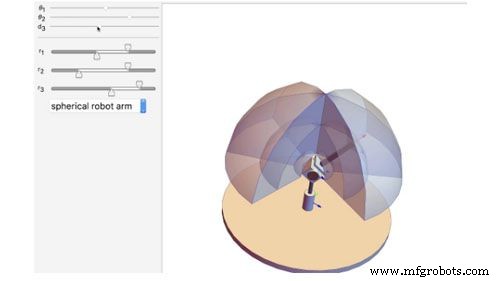
エンドエフェクタを異なる方向に向けるために使用される2つのデカルトロボットについて考えてみます。 2台のロボットは、3つの直交するリニアガイドと3つの回転ステージのスタックを備えた6軸ポジショニングを備えています。使用するロボットが軸と関節を本来あるべき位置に保つことができれば、エンドエフェクタの向きは簡単です。
精度と精度を維持しながら、ワークスペース内の6Dパスに沿ってエンドエフェクターを継続的に使用できます。ただし、軸と関節が一致すると、特異点が発生し、ロボットは6自由度で自由に移動できなくなります。
このロボットでは、回転ジョイントと一致する軸を中心にエンドエフェクタを回転させることができないことがわかります。この種の特異点は、ジンバルロックと呼ばれることがよくあります。ほとんどの特異点が方程式の助けを借りて解かれることを考えると、特定のデカルトベクトルの速度を決定することが難しくなることがわかります。特異点が発生すると、特徴となる速度に関連する数値の強度を把握する機能が妨げられます。
ロボットアームの速度を測定できることは、安全を確実に守るために不可欠です。特異点の問題に直面すると、ロボット工学はまだその時点ではありませんが、それがロボット工学に大きなリスクをもたらすことがわかります。その結果、ジョイント速度が高くなり、特に大きくて高速な産業用ロボットで作業している場合は危険な場合があります。これが、作業している速度をマッピングすることが非常に重要である理由です。 出典:Youtube
ロボットの特異点に関しては、逆速度の運動学に影響を与えるだけでなく、逆位置の運動学方程式にも影響を及ぼします。産業用ロボットを使用すると、さまざまな関節位置の方程式と解が特徴であることがわかります。機能するさまざまなソリューションは、さまざまな構成タイプに密接に関連しています。
たとえば、ロボットがエンドエフェクタ位置へのジョイント位置に対して8つの独自のソリューションを備えている場合、8つの異なる構成タイプも備えています。構成タイプを変更するには、特異点を通過する必要があります。特異点は、デカルトワークスペースに表示される6Dエンティティの間にある境界であり、典型的な6軸ロボットです。これにより、実現できるさまざまな構成と、産業用ロボットで使用できるワークスペースの境界が制限されます。 出典:ブログ。 grabcad.com
ロボットの特異点は、使用している産業用ロボットアームで発生する可能性があるという事実を考えると、さまざまなタイプがあることを認識することが重要です。ロボットアームがさまざまな部分にあるように、特異点もこれらのさまざまな部分に影響を与え、さまざまな問題を引き起こします。
ここでは、産業用ロボットアームに搭載されている関節のさまざまな軸に留意することが重要です。平行な2と3、2と3に垂直な1と4、4と6の軸ジョイントに垂直なジョイント5の軸で作業します。これで、特異点タイプを探索するためのより良い場所にいるさまざまな軸とジョイント。考慮すべき垂直多関節ロボットアームの特異点の最も明白なタイプは次のとおりです。 出典:サイト。 google.com
インライン手首を備えた垂直多関節ロボットアームに関しては、手首の特異点が最も一般的な問題である傾向があります。このタイプの特異点は、ジョイント4と6の軸が互いに一致する場合に発生します。この場合、手首はエンドエフェクタを関節5の軸の方向に動かすことができません。アプリケーションでは、正確に機能している産業用ロボットアームを検討してください。
特異点を通る線をたどるには、ジョイント4と6が同時に、90度回転する必要があります。これは、プロセスが正確であることを保証するために反対方向に行われます。これは、手首の特異点を越えることが可能であることを示しています。ただし、特異点に到達すると、2つの関節が回転している間、エンドエフェクタは静止したままになります。エンドエフェクタが特異点を越えるには、最初に停止する必要があります。それが適用されていた場合、それは作業中の産業用アームの精度を妨げるでしょう。問題を修正するために簡単に実装できる手首の特異点の解決策はたくさんあります。 出典:www。 electronicsteacher.com
手首がインラインで垂直多関節ロボットの腕を操作するときに遭遇する可能性のある2番目のタイプの特異点は、肘の特異点です。これは主に、手首の中心が関節2と3の軸を通る平面上にある場合に発生します。手首の中心は、関節4、5、および6の軸が交差する点を指すために使用されます。肘の特異点では、腕が完全に伸ばされていることがわかります。また、完全に折りたたむことができない場合もあります。この種の特異点は、主に関節3の軸と位置によって決まります。肘の特異点には、ロボットアームで発生する可能性のあるパフォーマンスの問題を解決するのに役立ついくつかのソリューションもあります。このタイプの特異点は非常に頻繁に発生し、簡単に予測して回避することもできます。 出典:blenderartists。 org
遭遇する可能性のある最後の特異点は、ロボットの手首の中心が関節1と2の軸を通る線上にあるときに発生する肩の特異点です。この特異点は、依存しないことを考えると、残りの中で最も複雑です。単一の関節位置。肩の特異性により、関節2の軸方向への動きが制限されます。
アプリケーションでは、ロボットが肩の特異点を通る線をたどるには、関節1と4が同時に90度の角度で回転する必要があります。手首の特異点のようなこの回転は、エンドエフェクタが一定のままで反対方向に行われます。手首の特異点と同様に、肩の特異点を通る動きは可能ですが、それを可能にするためにエンドエフェクタは停止する必要があります。この特異点には、ロボットアームが最高の状態に戻ることを保証するために実装できるいくつかのソリューションも含まれています。 出典:www。 istockphoto.com
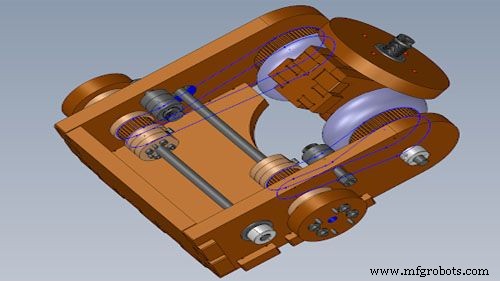
協働ロボットの場合、関節2、3、4の軸は平行で、関節1の軸は交差し、関節2の軸に垂直です。さらに、関節の軸も備えています。関節4と6の軸と交差し、軸に垂直です。関節式ロボットの特異点と同様に、これらのロボットも、さまざまな構成タイプに対してさまざまなソリューションを備えています。コボットに含まれる特異点の種類は次のとおりです。
これらのロボットの手首の特異点は、関節4と6の軸が平行になるときに発生します。この状況では、エンドエフェクタが一定のままで、ジョイント2、3、4、および5の軸が移動できることがあります。
これらのロボットでは、関節2、3、および4の軸が同じ平面にあるときに肘の特異点が発生します。これにより、エンドエフェクタの動きが大幅に制限され、ロボットアームのパフォーマンスに影響を与えます。
肩の特異点は、関節5と6の軸の交点が、関節1と2の軸を通過する平面にあるときに発生します。ここでは、特異点を修正し、産業用ロボットを動作させるために実装できるソリューションがいくつかあります。 出典:www。 ennomotive.com
さまざまな影響があるため、ロボットの特異点は製造プロセスに影響を与えるため、それらを回避する方法が不可欠です。ロボットの種類が異なると、操作するロボットの種類によって特異点が異なります。それらを回避する方法を基本的に理解することで、プロセスを簡単に実行できます。一般に、特異点は、ロボットセルが適切に設計されていることを確認することによってのみ回避できます。これはまた、エンドエフェクターに使用することを選択したアダプタープレートに採用されているデザインにまで浸透します。
たとえば、ロボットアームを構成していて、手首の特異点に対応するピック位置の割り当てが不十分な場合、問題を解決するためにできることはあまりありません。これを使用すると、ポーズが非特異なアプリケーションで使用できるかどうかを確認するだけです。さらに、工具に小さな角度を追加することで、特異点を回避することもできます。これは、ロボットが特異点に移動する可能性を減らすのに大いに役立ちます。これは主に、メカニズムを理解し、ソリューションを微調整できる技術者が使用する手法です。
最後に、特異点はプログラミングのアプローチを取ることによって回避することもでき、数学が物事の世話をするのを助けます。ここでは、特異点を回避できるように軸の数が大幅に削減されていることがわかります。これは主に、軸の数が多いほど特異点が発生する可能性が高くなるためです。特異点は、軸が互いに整列し、特定の方向へのロボットアームの動きをブロックするときに発生することを忘れないでください。軸の数を減らすと、軸が整列して閉塞を引き起こす可能性も低くなります。
ロボットの特異点は、ロボットアームやその他の自動化装置のさまざまな産業用途で経験される大きな問題です。これらの問題に自分で対処することは、ドラッグになる可能性があるため、ロボットの特異点を回避する必要があります。ただし、この問題が発生した場合は、解決策を見つけるか、問題に対応する知識のある技術者を雇うことができます。
または、特異点に遭遇したときに役立つ評判の良い自動化機器メーカーと緊密な協力関係を築きます。時間をかけて、ロボット機器が適切に機能し、ビジネスでの使用を完全にカスタマイズして活用できるようにしてください。 

ロボットの特異点に影響を与えるものは何ですか?



6軸協働ロボット(コボット)の特異点のタイプ


結論
産業用ロボット