


ロボットジョイントの種類:詳細ガイド
出典:www。 idtechex.com
製造業の自動化は急速に勢いを増しており、ロボット工学の使用を採用する企業が増えています。これは、ビジネスにおける自動化のメリットと、よりスマートでインテリジェントなプロセスの使用に起因しています。あなたはより多くの生産を得ることができ、また製造工場での怪我のリスクを減らすことができます。ほとんどの企業は、他のタスクの中でも特に、ピックアンドプレース、パッケージング、塗装、および組み立てに対応するためにロボットアームの使用に傾いています。
出典:www。 researchgate.net
ロボットの関節とは、隣接するリンク間の相対的な動きをもたらすロボットの可動コンポーネントを指します。このコンテキストでは、リンクは、明確で適切な機能のためにジョイントを接続する剛性のある部材を指すために使用されます。これは、産業用ロボットアームが最適な機能のためにリンクとジョイントの組み合わせの使用を特徴としていることを示しています。アプリケーションでの精度と正確さを確保するために、マニピュレータのジョイントが適切に機能していることを確認することが重要です。
ロボットの関節は、軸と呼ばれることもあります。それらは不可欠であり、腕の動きが制限されたり妨げられたりしないようにするために役立ちます。ロボットジョイントについてさらに学ぶことは、あなたが提供したいタスクに応じて、あなたが扱いたいロボットアームのタイプを決定するのに役立ちます。 出典:www。 britannica.com
製造業で使用されるロボットにはさまざまな種類があるため、さまざまな機械的ジョイントもあります。これらの関節は、特に使用するロボットのタイプに関しては、動作と用途の点で異なります。
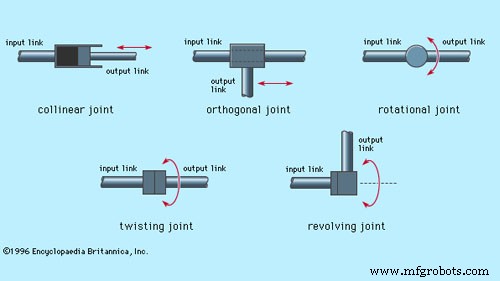
ロボットアームに搭載されている機械的ジョイントに関しては、考慮する必要のある5つの主要なタイプがあります。ジョイントの2つは線形です。これは、隣接するリンク間の相対運動が並進であることを意味します。一方、他の3つは回転式です。つまり、リンクの相対運動には、リンク間の回転が含まれます。ロボット用の5種類の機械的ジョイントは次のとおりです。
線形関節では、隣接するリンクによって特徴づけられる相対運動は平行であることを意味します。これは、入力リンクと出力リンクが線形運動でスライドしていることを意味します。この種の動きは、並進運動をもたらします。この種の線形運動は、伸縮機構とピストンの使用を含むいくつかの方法で達成することができます。このタイプのジョイントは、Lジョイントとも呼ばれます。
直交ジョイントは、一般にタイプOジョイントとも呼ばれます。それらは、入力リンクと出力リンクによってとられる相対的な動きを特徴としています。直交関節に含まれるこの種の運動は、並進スライド運動です。ただし、直交ジョイントの線形ジョイント配置とは異なり、出力リンクは入力リンクに垂直です。
回転関節に関しては、複数のワークスペースで作業するロボットマニピュレータに役立つ回転相対モーションの使用がわかります。これらの動きは、回転軸が入力リンクと出力リンクの軸に垂直になるように実行されます。これらの回転ジョイントは、タイプRジョイントとも呼ばれます。
このタイプのジョイントは、使用時にある程度の回転をもたらす回転運動を特徴としています。これらのジョイントの動きは、入力リンクと出力リンクの軸に垂直な回転軸を基準にしています。ツイストジョイントはタイプTジョイントとも呼ばれます。
回転関節では、物事は他のものとは少し異なります。これらのジョイントは、さまざまなアプリケーションで役立つ回転運動も備えています。これらの関節の動きは、2つのリンク間の動きを特徴としています。入力リンクの軸は、ジョイントの回転軸と平行になるように設計されています。一方、出力リンクの軸は、関節の回転軸に垂直になるように設計されています。このタイプのジョイントは、タイプVジョイントとも呼ばれます。 出典:www。 technologyreview.com
さまざまなロボットは、さまざまなタイプの機械的ジョイントの使用を特徴としています。さまざまなロボットについてさらに学ぶことで、自分に合ったロボットに投資するためのより良い立場に立つことができます。考慮すべき最も一般的なロボットには、次のものがあります。
多関節ロボットの設計には、さまざまな範囲と回転ジョイントの組み合わせが付属している可能性があります。この範囲は、単純な2つのジョイント構造を特徴とし、10以上のジョイントを持つより複雑な構造に移行する場合があります。この設計では、アームのリンクが回転ジョイントで接続されている間、アームはツイストジョイントを使用してベースに接続されています。
デカルトロボットを使用した設計では、3つの線形ジョイントを使用しています。これらの関節は、X、Y、およびZを含むデカルト平面に搭載されています。これらのロボットには、移動しやすい回転関節を備えた手首が取り付けられている場合もあります。この特定の種類のロボットは、直線型またはガントリーとも呼ばれます。
円筒形ロボットは、ベースに取り付けられた回転関節と、さまざまなリンクを接続するために使用される1つの線形関節を備えています。円筒形のロボットが円筒形の作業範囲内で動作することを考えると、回転運動と線形運動は、精度を確実に達成するのに役立ちます。
ロボットの極座標設計では、アームはツイストジョイントを使用してベースに接続されます。場合によっては、2つのロータリージョイントと1つのリニアジョイントの組み合わせを使用することもあります。このロボットは球形ロボットとも呼ばれるため、対象となる作業範囲も球形になります。このロボットで使用される軸は、マニピュレータが簡単に動作できるようにする極座標系を形成します。
スカラロボットは、多くのメーカー、特に組み立てプロセスの自動化を検討しているメーカーの間で人気のあるオプションです。このロボットは通常円筒形で、比較的円筒形の作業範囲で動作します。組み立て工程で重宝する2本の平行ジョイントを採用しています。これらのジョイントは、ロボットが使用されているときに、選択した1つの平面でコンプライアンスを提供します。
デルタロボットは、ユーザーに優れたサービスを提供できるようにするスパイダーのようなビルドで設計されています。それらは、共通ベースに結合および接続された平行四辺形から構築されます。このタイプのロボットに搭載されている関節は、回転と線形の両方です。これにより、ロボットはドーム型の作業領域でアームツーリングの一端を動かすことができます。パフォーマンスを向上させ、さまざまなタスクの開発が正確に実行されるようにします。
ビジネスのさまざまなプロセスを自動化する手段としてロボット工学を使用する場合は、さまざまな側面に留意する必要があります。これらの側面は、使用する特定のロボット工学のパフォーマンスに大きな役割を果たします。産業用ロボットアームの使用に関しては、ロボットの関節は常に最新の状態に保つ必要があります。
さまざまな関節と、それらがロボットのパフォーマンスにどのように影響するかを理解してください。これは、自動化したいアクティビティに最適なジョイントの種類を判断するのに役立ちます。それができたら、市場に出回っている関節に付属しているロボットアームに投資することができます。時間をかけて、あなたを助けてくれる自動化装置メーカーと協力してください。 
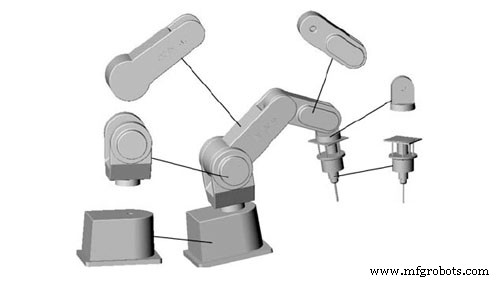
ロボットアームをビジネスに組み込むときは、最高の製品を提供する高品質のロボットアームメーカーと協力するようにしてください。さらに、それらが何を伴うのかについての基本的な理解を持つことも不可欠です。ロボットアームは、特定の機能を持つボディ、手首、エンドエフェクターを備えています。これらのさまざまな部品が正確に機能するためには、ロボットの関節が存在する必要があります。この記事では、理解を深めるために、さまざまなロボットの関節について詳しく説明します。 ロボットジョイントとは何ですか?

デカルト座標
円筒形
極
スカラ
デルタ
結論
産業用ロボット