


11 の最も有用なロボット プログラミングの基本
ロボット プログラミングを始めるときに知っておくと最も役立つ基本的なプロパティはどれですか?
ロボット工学の世界に不慣れな方も、プログラミング スキルの向上を目指しているだけの方も、知っておくと便利なロボット プログラミングの基本をご紹介します。
ロボットのプログラミングを始めるには、ロボット工学の学位が必要だと感じることがあります。産業用ロボット プログラミングへの従来のアプローチは、新しいロボット プログラマーにとって理解しにくいように見えます。
ただし、ロボット工学の基本と優れたロボット プログラミング ソフトウェアがあれば、簡単かつ迅速に始めることができます。
以下は、最も役立つ 11 のロボット プログラミングの基本です。
1.ロボットの基本パーツ
ロボットのプログラミング方法を学習する前に、産業用ロボットの基本的な部分を理解しておくと役に立ちます。そうすれば、プログラミングする物理マシンに少なくとも慣れることができます。
たとえば、6 DoF 産業用ロボットの最も基本的な部分は次のとおりです。
- マニピュレーターの腕
- エンドエフェクター
- コントローラー
- 電源
- センサー (ある場合)
コンポーネントは、ロボットの種類によって若干異なります。
2.自由度
ロボット工学の重要な概念である自由度 (DoF) を紹介しました。
ロボットの自由度は、ロボットが移動できる独立した軸の数を指定します。たとえば、6 DoF のマニピュレーター アームには、独立して制御可能な 6 つの軸があります。一部の DoF は「回転」(つまり、点を中心に回転) で、一部は「線形」(つまり、線に沿って移動) です。プログラムを作成する前に、ロボットの自由度を理解しておくと役に立ちます。
3.ジョイントとエンド エフェクター
ロボットの「ビジネス エンド」(つまり、タスクで動作する部分)は「エンド エフェクタ」として知られています。プログラミングをしているとき、通常、ロボットのエンド エフェクタを特定の場所に向けることに最も関心があります。
ロボットを動かすには、ロボットの各 DoF の希望する位置を含む命令を送信する必要があります。 RoboDK などのソフトウェアを使用している場合は、特定のジョイント位置を送信する代わりに、目的のエンド エフェクタ位置を直接プログラムするだけで済みます。
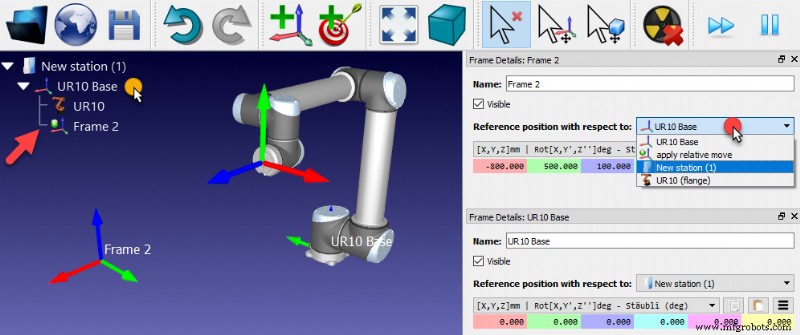
4.ポーズ:位置と向き
エンドエフェクタにどこへ行くかを指示するようにどのようにプログラムしますか?
ロボットのエンド エフェクタ (またはプログラムしたその他の場所) の位置と向きを組み合わせて、「ポーズ」を形成します。プログラムでロボットが移動する場所のポーズを指定する必要があります。プログラミングでポーズを指定する最も一般的な方法は、オイラー角を使用する方法です。
詳細については、記事「ロボットのオイラー角:基本入門書」を参照してください。
5.ツール センター ポイント (TCP)
ロボットをプログラミングする際にエンド エフェクターのポーズに最も関心があるため、ツール センター ポイントという用語を使用して、ツールの操作中心を指すことがよくあります。
さまざまなエンド エフェクターの例を次に示します。
- グルーガン — TCP を銃の先端に設定することもできます。
- グリッパー — TCP は、グリッパーの指の中央にある可能性があります。
- 溶接ガン — TCP は、炎が最も熱くなる銃の先端から数ミリ離れている場合があります。
プログラマは、ロボットの TCP を配置するのに最も適した場所を選択します。
6.運動学
ロボット工学のより困難な側面の 1 つは運動学です。これは、ロボットの幾何学的な配置を意味します。運動学は、かなり大きな方程式またはアルゴリズムとして表されます。
フォワード キネマティック方程式は、「ロボットのジョイントを特定の位置に設定すると、TCP はどこに到達するか?」という質問に答えます。
インバース キネマティック アルゴリズムは、反対の質問 「TCP をこのポーズにしたい場合、ジョイントをどの位置に設定する必要があるか?」 に答えます。
優れたロボット プログラミング ソフトウェアがあれば、おそらく独自の運動学を定式化する必要はありませんが、基本概念を理解しておくと役立ちます。
7.関節制限
運動方程式は、純粋な幾何学と数学を使用してロボットを記述します。しかし、ロボットは物理的な機械です。多くの場合、物理的なロボットは、ジオメトリが示すすべての位置に到達できるとは限りません。
プログラミングに関節制限を導入して、ロボットの関節の動きを物理的に可能な位置にのみ制限します。プログラムに「この関節はこの特定の角度を超えて動くことはできません」と伝えるだけです。
8.移動の種類
ロボットをプログラミングするとき、ロボットに実行させるさまざまなタイプの動きがあります。
基本的な 3 つの動きは次のとおりです。
<オール>9.シミュレーションとオフライン プログラミング
ロボットのプログラミングには、ロボット メーカーが提供する (通常は複雑な) プログラミング言語を使用した「手を汚す」など、さまざまな方法があります。
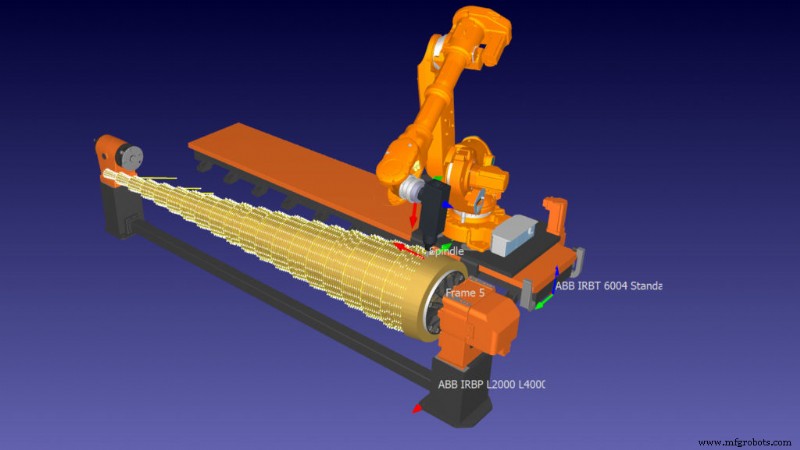
シミュレーションとオフライン プログラミングにより、より簡単なプログラミング方法が提供されます。物理的なロボットを直接プログラミングする代わりに、直感的なコマンドを使用してロボットのシミュレーション モデルをプログラミングします。その後、ソフトウェアはプログラムを物理ロボットが理解できるコードに変換します。
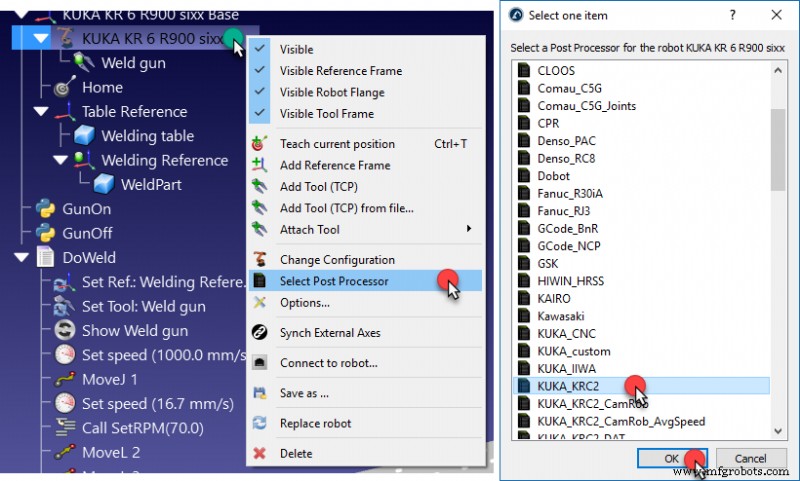
10.ポストプロセッサー
ロボット プログラムを変換するオフライン プログラミング ソフトウェアの部分は、ポストプロセッサとして知られています。プログラミング ソフトウェアには、ロボット メーカーごとに異なるポスト プロセッサがあり、複数の場合もあります。
ポスト プロセッサの詳細については、ロボット ポスト プロセッサ:知っておくべきすべての記事をご覧ください。
11.デバッグ
どのようなプログラミング方法を使用していても、重要な基本スキルはデバッグです。実稼働環境でロボットの実行を設定する前に、プログラムが意図したとおりに動作することを確認するために、常にプログラムをデバッグする必要があります。
オフライン プログラミングでは、プログラムを実際のロボット自体にダウンロードする前にロボットのシミュレートされたモデルをプログラムするため、追加のデバッグ手順が提供され、エラーの可能性が減少します。
すぐにロボット プログラミングを開始したい場合は、RoboDK の無料トライアルをこちらからダウンロードできます。
ロボット プログラミングのどの基本的な側面についてサポートが必要ですか? 以下のコメントでお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションに参加してください。
産業用ロボット