コボット 2026:協働ロボットの仕組みとその重要性

EVST 編集チームによる · 最終更新日:2026 年 6 月 10 日
協働ロボット (コボット) は、安全柵を必要とせずに人のそばで操作できるように設計された軽量の産業用アームです。これは、力と力の制限によって実現されます。各関節のトルク センサーが接触を感知し、衝突によって傷害が生じる前にアームを即座に停止または格納します。 ISO/TS 15066 では、人間とロボットの間の許容される近接性を定義する 4 つのコラボレーション モードについて概要を説明しています。 2026 年には、コボットの積載量は通常 3kg ~ 30kg の範囲で、到達範囲はおよそ 600mm ~ 1,800mm になります。
コボットと従来のロボットの違い
「協調的」という用語は、別個の機械的なクラスではなく、安全機能を指します。コボットは、すべての関節にサーボ モーター、ギアボックス、エンコーダーを備えた 6 軸多関節アームのままです。この製品の特徴は、ワークスペースを安全に共有できるようにする追加のセンシングと制御に、丸みを帯びたエッジ、低い移動質量、挟み込みポイントのない、速度制限など、怪我のリスクを最小限に抑える設計と組み合わされていることです。
従来の産業用ロボットは、作業範囲内に人間が存在しないことを前提として、警備されたセル内での速度、積載量、再現性を重視して構築されています。協働ロボットは、共有スペースで動作する能力と引き換えにピーク速度と積載量を犠牲にしており、その結果、導入の経済性が変わります。協働ロボットのセルは、フェンス、ライトカーテン、およびフェンスで囲まれたセルに必要な頭上のスペースを省略できます。このコスト削減は、中小規模の製造業者にとって重要な利点です。協働ロボットのタイプと選択基準の構造化されたウォークスルーについては、協働ロボットのタイプ、選択、およびアプリケーションに関する完全ガイドを参照してください。このガイドは、安全メカニズムについてさらに深く掘り下げてこの記事を補完しています。
国際ロボット連盟の 2025 年ワールド ロボティクス レポートによると、協働ロボットは依然として設置総数に占める割合は少数ではあるものの、台数増加率では依然として産業用ロボット市場で最も急成長しているセグメントです。成長は、電子機器の組み立て、機械の手入れ、梱包に集中しています。これらの分野は、部品の重量が軽く、人間とロボットの近接性が運用上有益な分野です。
協働ロボットの仕組み:安全機構
協働ロボットを実現する中核となるテクノロジーは、協働ロボットが接触力を感知して制限する方法です。 2026 年には 3 つのアプローチが主流となり、ほとんどの生産協働ロボットは複数のアプローチを組み合わせています。
関節トルク検出
各ジョイントにはトルク センサーが含まれており、コントローラーがモーター電流からトルクを推測します。通常の動作中、コントローラーはプログラムされた速度でプログラムされた経路の予想トルク プロファイルを認識します。測定されたトルクがしきい値を超えると、コントローラーはそれを予期しない外力として解釈し、保護停止をトリガーし、アームを安全な位置に戻します。接触から停止までの反応時間はミリ秒程度であり、接触力を損傷の閾値以下に保ちます。
電力および力の制限 (PFL)
PFL は最も一般的なコラボレーション手法です。このロボットは、最悪の場合の接触の場合でも、伝達される力と圧力が、関連する身体領域について ISO/TS 15066 AnnexA で定義されている生体力学的制限を下回るように設計および構成されています。これは、低い移動質量、速度制限、丸みを帯びた形状、および上記のトルク感知ストップによって実現されます。 PFL では、ロボット自体が安全システムとして機能するため、多くの協働ロボットをフェンスやライト カーテンなしで実行できます。
速度と間隔の監視
代替または補完として、レーザー スキャナ、3D カメラ、安全マットなどの外部安全センサーがオペレーターの位置を追跡します。ロボットは、近くに人がいないときは全速力で走行し、人が近づくと減速し、保護分離距離を超えると停止します。これにより、作業スペースに空きがある場合、より高速で重いロボットが生産速度を犠牲にすることなく協調的に動作できるようになります。
実際には、最もクリーンな導入では、ベースラインの安全性としての PFL と、オペレーターがいないときにスループットを回復するために重ねられた速度と分離の監視という方法を組み合わせます。組立ライン導入による業界の観察によると、ワーストケースの PFL 速度のみを考慮して構成された協働ロボットは、作業スペースに空きがある場合に高速に動作できる同じアームと比較して、潜在的なスループットの 40% ~ 60% を失う可能性があることがわかっています。そのため、現在、ハイブリッド構成が大量生産ラインのデフォルトとなっています。
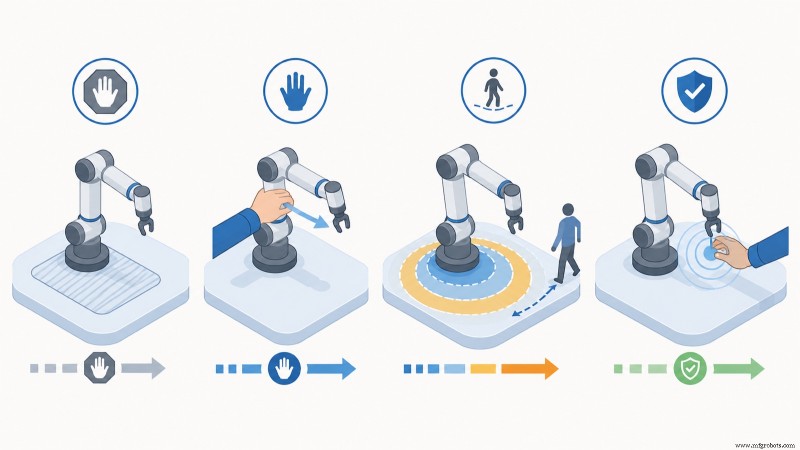
ISO/TS 15066 に基づく 4 つのコラボレーション モード
ISO/TS 15066:2016 は、共同運用に関して ISO10218 を補足し、4 つの異なるコラボレーション方法を定義しています。 1 つのアプリケーションで 1 つを使用することも、複数を組み合わせて使用することもできます。アプリケーションに必要なモードを理解することは、安全なコボット セルを指定するための最初のステップです。
| コラボレーションモード | 仕組み | 人間とロボットのインタラクション | 一般的なアプリケーション |
| 安全性が評価された監視停止 | 人が共有スペースに入るとロボットは停止します。退出時に再開 | 協調ゾーンに人間がいる間は動きません | ロボット セルの手動ロード/アンロード、時折の共有スペース タスク |
| ハンドガイド | オペレータはハンドガイド デバイスを使用して腕を物理的に動かします。ロボットは加えられた力に従う | 直接的な物理的誘導、オペレーターによるロボットの動作 | ティーチング パス、持ち上げ補助、少量パーツの位置決め |
| 速度と間隔の監視 | ロボットの速度は、安全センサーによって測定されるオペレーターの距離に応じて変化します | 動的減速との共存、最短距離で完全停止 | 人間とロボットが交互に近接して作業する混合セル |
| 電力と力の制限 | 接触力と圧力は設計と制御により生体力学的限界以下に抑えられています | 直接の連絡は許可されています。ロボットは予期せぬ力で停止します | オペレータの隣で組立、機械の手入れ、梱包を行う共有タスク |
ISO/TS 15066 では、体の部位ごとに生体力学的制限を整理しています。顔と頭蓋骨の制限は、上腕や手よりもはるかに厳しく、潜在的な傷害の重症度を反映しています。正しいリスク評価では、接触の可能性があるロボットの経路の部分を接触の可能性のある身体領域にマッピングし、力と圧力が関連する制限値以下にとどまっていることを検証します。ある用途では「安全」な協働ロボットが、別の用途では自動的に安全ではないのはこのためです。ツール、部品、レイアウトを変更すると、接触シナリオが変わります。
コボットの構造:コンポーネントと仕様
コボットの仕様書は小型産業用ロボットの仕様書に似ていますが、コラボレーション特有の追加点がいくつかあります。選択時に最も重要なパラメータは次のとおりです。
- ペイロード — グリッパーまたはツールを含むツールフランジでの最大質量。 2026 台の協働ロボットのペイロードは、3、5、6、10、12、16、18、20、最大 30 kg クラスに集中しています。
- リーチ — 作業範囲の半径、通常は 500mm ~ 1,800mm。リーチとペイロードは、プロダクト ファミリー内で互いにトレードオフになります。
- 再現性 — アームが教示された点にどの程度正確に戻るか。サイズに応じて通常は ±0.02 mm ~ ±0.1 mm。再現性は一貫性を測るものであり、これはほとんどの組み立て作業や手入れ作業に必要なものです。
- 自由度 — 一般的な 3D タスクでは 6 が標準です。 7 軸協働ロボットにより、雑然とした空間でも柔軟に対応できるようになります。
- ツール フランジと I/O — 取り付けインターフェースと、グリッパーとセンサーの電気/空気圧接続。多くの場合、手首を介して配線されます。
- 安全性が評価された機能 — 構成可能なセーフティ ゾーン、速度制限、力制限、安全評価された監視付き停止はすべて ISO10218‑1 および IEC61508/62061 の機能安全レベルで認定されています。
コラボレーション機能は、単一の目に見えるコンポーネントではなく、主にコントローラーとジョイント センシングに存在します。ペイロードとリーチが同じ 2 つのアームでも、安全性と速度が大きく異なるのはこのためです。違いは、安全コントローラー、センサーの解像度、衝突検出の調整にあります。
コボットが適用される場所
コボットは、部品の重量が控えめで、人間が近くにいることが便利で、アームを再展開する柔軟性がピークサイクルタイムよりも重要であるアプリケーションで成功します。 2026 年の最も一般的なアプリケーション ファミリは次のとおりです。
機械の手入れ
CNC 機械、射出成形プレス、プレス ブレーキの積み下ろし。コボットはブランクを選択し、機械にロードし、サイクルを待って、完成した部品をアンロードします。協働ロボットが停止しているときでもオペレーターは機械にアクセスできるため、セルは柔軟性を保ちます。マシンテンディングは、設置ベースで最大のコボット アプリケーションです。
組み立てとネジ締め
繰り返しの固定、挿入、ピックプレースによる組み立て作業は、多くの場合、判断力のいる手順を担当する人間と並行して行われます。力制御された協働ロボットは、プログラムされた力プロファイルにより部品の損傷を防ぐ挿入作業 (圧入、スナップフィット) に優れています。
梱包とパレット積み
エンドオブラインのケース梱包と軽いパレタイジング。コボットパレタイザーはアームの積載量まで箱を扱い、パレット上に安定したスタックを構築します。より重い場合は、積載量が制限要因となり、従来のパレタイジング ロボットが引き継ぎます。
品質検査とラボの自動化
カメラまたはセンサーを備えた協働ロボットは、反復可能な検査パスを実行し、研究室ではサンプル、ピペット、および機器の手入れを処理します。フェンスのないレイアウトは、人と機器が狭いベンチを共有する環境に適しています。
溶接と表面仕上げ
コボット溶接は、短いシームと少量の溶接セルではフェンスで囲まれた溶接セルが正当化されない現場で急速に成長しています。コボットは力制御によりサンディング、研磨、バリ取りも行います。重工業向けの溶接ロボット ガイドで説明されているように、重量部品の継続的な大量溶接には、フェンス付き 6 軸アームが適切なツールです。
危険かつ極端な環境
防爆協働ロボットは、化学設備、塗料設備、エネルギー設備などの可燃性ガスが存在する雰囲気に共同作業を拡張します。これらには、標準のコボット ハウジングではなく、認定されたエンクロージャ定格が必要です。認定の詳細については、危険環境向け防爆協働ロボットの専用ガイドをご覧ください。
協働ロボット vs 産業用ロボット:どちらが勝つか
協働ロボットと従来の産業用ロボットのどちらを選択するかは、アプリケーションの決定であり、どちらのテクノロジーがより進んでいるかという問題ではありません。以下のマトリックスはトレードオフを示しています。
| 因子 | 協働ロボット | 従来の産業用ロボット |
| ペイロード | 通常 3 ~ 30 kg | 5 ~ 800kg 以上 |
| 速度 | 安全のため制限されています。分離モニタリングにより高速化 | 高、サイクルタイムに最適化 |
| 安全警備 | リスク評価後はフェンスがなくなることが多い | 柵で囲まれた独房、ライト カーテン、インターロック |
| 床面積 | コンパクトで、設置面積がありません | より大きく、安全境界線を含む |
| 再展開 | 速い。タスク間でアームを移動可能 | 遅い。セルは半永久的です |
| に適しています | ペイロードが低く、混在が多く、人が関与するタスク | 大量、高ペイロード、持続的なサイクル |
完全な意思決定のフレームワークについては、関連する分析「コボット vs 産業用ロボット:2026 年に工場はどちらを選択すべきか」を参照してください。つまり、ペイロードが低く、人とスペースを共有することでレイアウトに利点があり、ラインが頻繁に変更される場合はコボットが有利です。従来のロボットは、体積とペイロードが大きく、セルを専用にできる場合に最適です。
協働ロボットを安全に導入する:リスク評価
よくある誤解は、協働ロボットは「箱から出しても安全」であるということです。アームは協調的に動作するように構築されていますが、アームにツール、部品、レイアウト、タスクを加えたアプリケーション全体を評価し、認定する必要があります。 ISO10218‑2 および ISO/TS15066 では、インテグレータ (多くの場合、エンド ユーザー) は、完全な共同アプリケーションのリスク評価を担当します。
<オル> 危険を特定する。 人との接触の可能性があるロボットの経路上のすべてのポイントに加えて、工具の危険箇所(鋭利なグリッパー、高温のエンドエフェクター)、および扱われる部品をマッピングする
コラボレーション モードを分類します。 タスクが 4 つの ISO/TS15066 モードのどれを使用するか、またサイクルのどのフェーズで使用するかを決定します。
生体力学的限界を確認します。 電力および力が制限された操作の場合は、計算または力圧力試験装置を使用した測定によって、考えられる各接触の接触力と圧力がその身体部位の付録 A 制限を下回っていることを確認します。
安全機能を構成します。 セーフティ コントローラで速度、力、ゾーンの制限を設定し、それらを検証します。
文書化して検証します。 評価を記録し、それに対して完成セルを検証し、ツール、部品、レイアウトが変更されるたびに再評価します。
実際に、EVST アプリケーション エンジニアが現場で協調セルを委託する場合、検証中に最も頻繁に発見されるのは、アーム自体は力の制限内にあるにもかかわらず、グリッパーまたは鋭利な部品によって AnnexA の制限を超える接触圧力が発生するということです。通常、修正はグリッパーの再設計、エッジ ガード、または影響を受けるパス セグメントの速度の低下であり、別のロボットではありません。これは、購入者が協働ロボットによって安全エンジニアリングの必要性がなくなると考えるときに、最も過小評価しがちなステップです。
EVST の協働ロボット製品群
EVST は成都に本社を置き、温嶺に製造拠点を置き、7 年間で 100 か国以上にオートメーションを出荷してきました。同社の協働ロボットラインは、可搬重量 3kg から 30kg クラスをカバーしており、公開されているモデルには、3kg / 620mm アーム、6kg / 917mm アーム、12kg / 1,300mm アーム、および 18kg / 900mm アームが含まれます。 EVST は、従来の QJAR 産業用ロボット、SCARA、デルタ製品ファミリーに加えて、危険雰囲気用の防爆協働ロボットやケータリング サービス協働ロボット ラインも製造しています。
EVST の生産ラインは IATF16949 自動車グレードの品質認証を取得しており、その製品は CE、SGS、および TUV のサードパーティ認証を取得しています。この防爆協働ロボットは、可燃性雰囲気での使用を評価されており、標準的な協働ロボットのハウジングでは立ち入ることができない環境でも共同作業を拡張できます。同社はまた、1 件の付与された発明特許 (CNZL202011601091.6)、実体審査における 4 件の発明特許、および 2 件のソフトウェア著作権を保有しています。これらは、100 か国以上にわたるフィールド エンジニアリング ネットワークによってサポートされており、オンサイト試運転とリスク評価のサポートを行っています。
よくある質問
協働ロボットとは簡単に言うと何ですか?
協働ロボットは、安全柵なしで人の隣で安全に作業できるように作られたロボット アームです。ジョイントにはトルク センサーが使用されており、接触を検出して迅速に停止します。また、ISO/TS15066 で定義されているように、接触が怪我を引き起こす可能性のある力と圧力の制限を下回るように、低質量、制限速度、丸みを帯びた表面で設計されています。
協働ロボットには本当に安全柵が必要ないのでしょうか?
頻繁に行われますが、自動的には行われません。フェンスが必要かどうかは、アプリケーション全体、アームとそのツール、部品、タスクのリスク評価によって異なります。多くの低ペイロード、低速アプリケーションは、評価後にフェンスレスで実行されます。ただし、鋭利な工具、重い部品や鋭利な部品、または高速要件により、追加の保護や速度と間隔の監視が必要になる場合があります。協働ロボットはフェンスのないレイアウトを可能にします。リスク評価により、それが許容されるかどうかが確認されます。
協働ロボットにはどのような積載量と到達距離が必要ですか?
可搬質量に部品重量とグリッパー重量を加算し、およそ 20% ~ 30% の余裕を持たせてください。小さな部品の機械管理では、5kg ~ 10kg のアームが一般的です。パレタイジングまたはより重いハンドリング用、16kg ~ 30kg。リーチは作業の作業範囲全体をカバーする必要があります。通常、ベンチトップおよび機械管理作業の場合は 600 mm ~ 1,300 mm、パレタイジングの場合はそれより長くなります。
ISO10218 と ISO/TS15066 の違いは何ですか?
ISO10218 (パート 1 および 2) は、産業用ロボットとその統合の中核となる安全規格です。 ISO/TS15066 は、協調操作に特化して ISO/TS15066 を補足する技術仕様で、付録 A に 4 つの協調モードと生体力学的な力と圧力の制限が追加されています。協調アプリケーションは両方を満たす必要があります。購入者に焦点を当てた内訳については、EVST 製品サイトにある協働ロボットの安全基準に関するガイドをご覧ください。
協働ロボットはどれくらいの速さで移動できますか?
力と力の制限モードでは、協働ロボットの速度が制限されるため、最悪の場合の接触は生体力学的制限内に収まり、多くの場合、従来のロボットを大幅に下回ります。速度と間隔を監視すると、保護ゾーン内にオペレーターがいないときは同じアームが機械的最大値近くで動作し、人が近づくと減速または停止します。ハイブリッド構成では、共同作業の安全性を維持しながら、失われたスループットのほとんどを回復します。
次の目的地
特定の協働ロボットをペイロードに照合し、見積りへのパスを使用して要件を達成するには、EVST 製品サイトの協働ロボットのペイロードを 3kg から 30kg まで選択するためのガイドを参照してください。フェンスのないセルを指定する前に購入者が必要とする安全基準の詳細については、購入者向けに説明された協働ロボットの安全基準を参照してください。より広範な構築または購入の決定については、協働ロボットと産業用ロボットの比較をお読みください。利益を見積もるには、当社の中小企業製造向け協働ロボット ROI 計算ツールをご覧ください。調達に関する質問については、お問い合わせページから EVST の営業にお問い合わせください。
著者について:EVST 編集チームは、自動化プロジェクトを評価するエンジニアや運用リーダー向けに産業用ロボットとインテリジェント製造について執筆しています。 2018 年に成都で設立された EVST (EVSTECHCO.,LTD) は、QJAR、協働ロボット、SCARA、デルタ製品ファミリー全体で IATF16949 自動車グレード認証と CE/SGS/TUV サードパーティ認証を取得し、600 以上の自動化プロジェクトを提供し、100 カ国以上に出荷してきました。


