


GPS モジュール:初心者のための究極のガイド
GPS モジュール
あなたのプロジェクトには正確で正確な位置データが含まれていますが、どこから始めればよいか混乱していますか? GPS モジュールがあれば助かります。
基本的な GPS モジュールを使用すると、プロジェクトに必要なすべての位置データを取得できます。
GPS の操作は難しい場合がありますが、複数の個人や業界の努力のおかげで、複雑というよりも簡単です。
また、アプリケーションや適切な部品の調達に最適な GPS モジュールについて混乱することもあります。
この記事では、GPS 関連の問題の解決策を示し、GPS 回路について知っておくべきことをすべて学びます。
GPS モジュールとは?

GPS
位置情報といえば、真っ先に思いつくのがGPS。しかし、GPS とは正確には何ですか?
全地球測位システム (GPS) は、気象条件に関係なく正確な位置、速度、および時間を決定する無線ナビゲーション システムです。さらに、GPS は陸、空、海で機能します。
GPS モジュールは、デバイスまたは回路が GPS データを受信できるようにするデバイスです。ただし、GPS モジュールが利用できない場合は、簡単なコードで代わりにマイクロコントローラーを使用できます。
現在、GPS 設定は電話、コンピューター、その他のインテリジェント デバイスで標準装備されており、自分の位置を共有したり、別の物体や人物の位置を追跡したりできます。また、GPS を使用すると、リアルタイムの地図にアクセスしたり、ナビゲーション システムを利用したりできます。
GPS の仕組み

GPS 衛星
GPS 衛星と GPS 受信機は、GPS 機能を可能にする 2 つの主要コンポーネントです。また、デバイスには常に受信機の送信範囲内に 4 つのアクティブな衛星があります。
各 GPS 衛星は、現在の時刻と位置に関するデータを受信機に送信します。次に、衛星はこのデータを GPS 受信機が傍受する無線信号に送信します。
興味深いことに、これらの無線信号は光速で移動するため、リアルタイム データ アプリケーションに十分な速さで伝送が行われます。さらに、衛星が信号を送信した時刻と受信機が傍受した時刻の違いに注目することで、衛星と GPS 受信機の間の距離を計算できます。
受信機がこれらの信号を 3 つ以上の衛星から収集すると、三辺測量プロセスによってその位置が特定されます。ただし、GPS 受信機は、位置データを配信するために最低 3 つの GPS 衛星を必要とします。

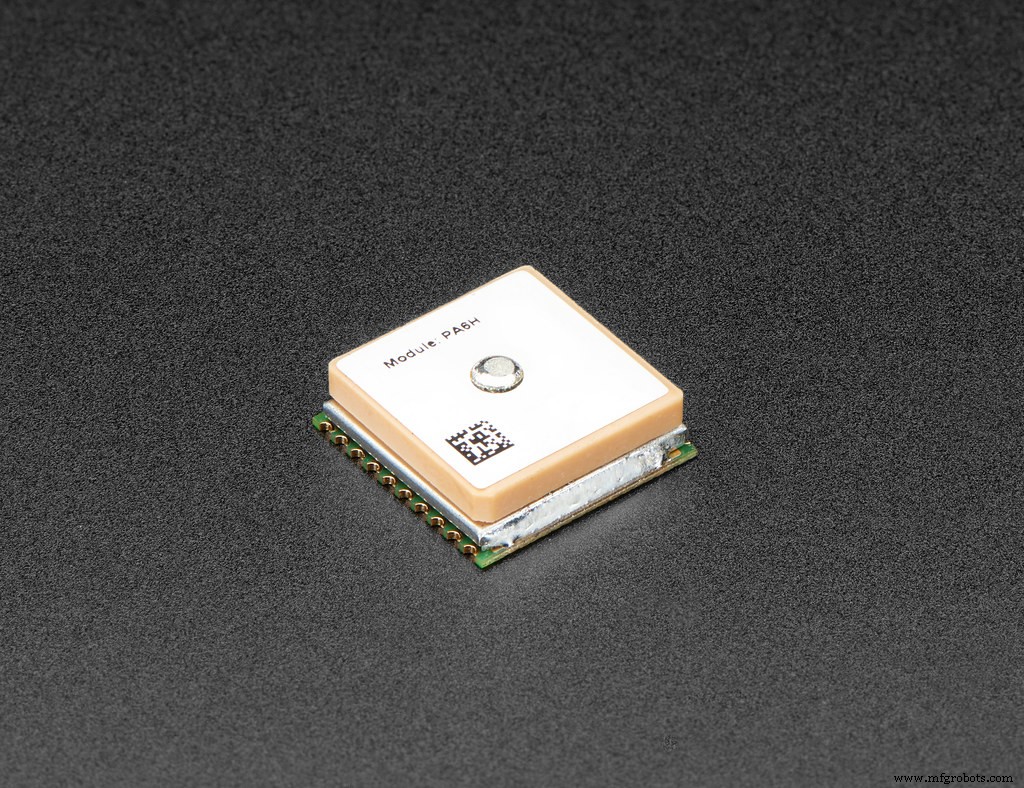
GPS レシーバー
興味深いことに、ほとんどの GPS モジュールは同じように機能します。これらは、SPI および I2C 通信インターフェイスのオプションとの通信に標準シリアル インターフェイスを使用します。
また、メッセージのフォーマットにも規格があります。 GPS モジュールは通常、NMEA-0183 フォームを使用してデータを出力します。
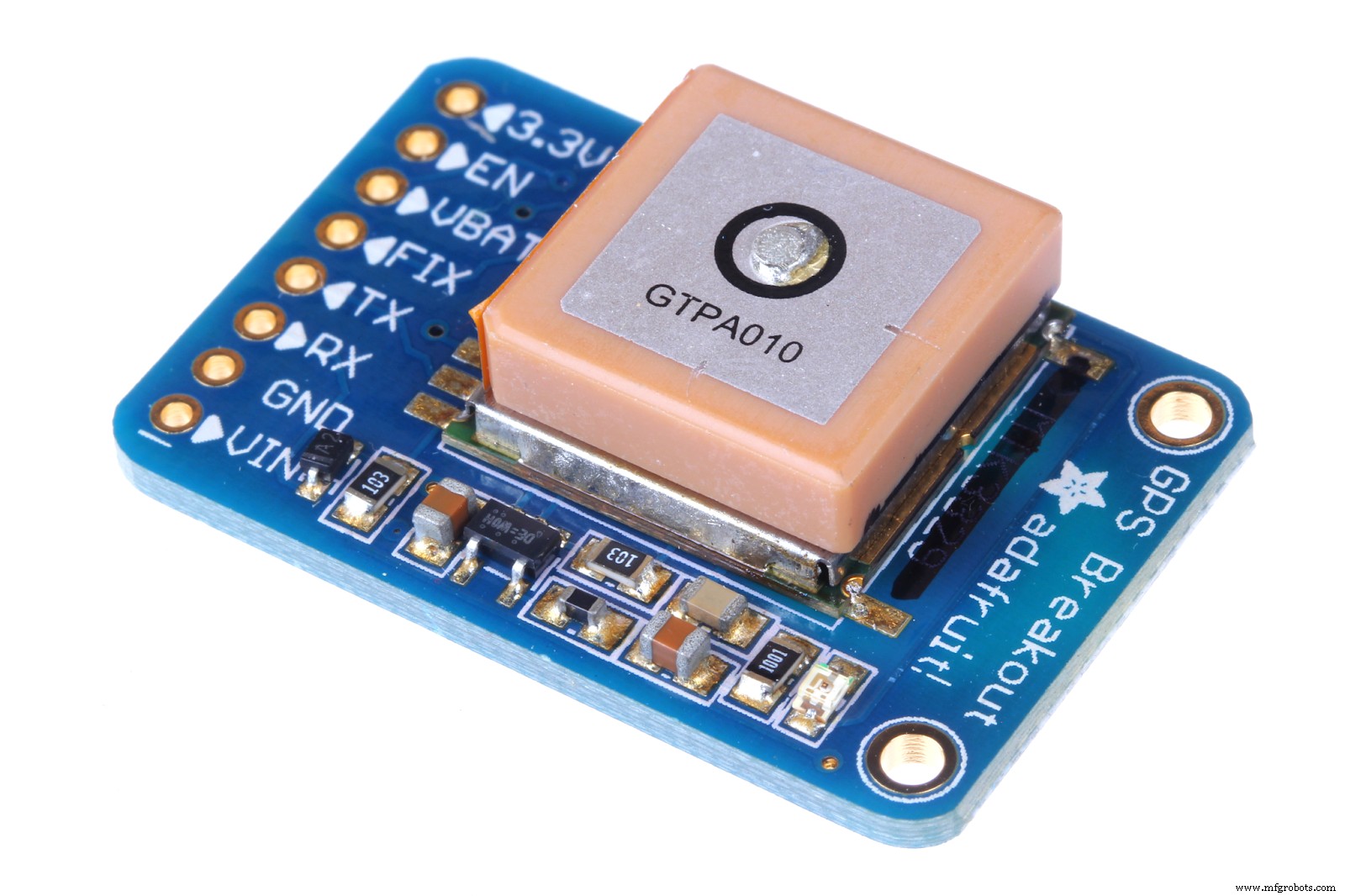
GPS モジュール 2
または、マイクロコントローラ プラットフォーム用のコードを使用して、ボードを GPS モジュールとして機能させることもできます。これらのプロジェクトには、Adafruit GPS、minima、NeoGPS などがあります。このようなプロジェクトでは、シリアル データ ストリームを使用して、必要なすべての位置データを提供します。
Arduino と Raspberry Pi を搭載した GPS モジュール
このプロジェクトでは、NEP-6M GPS モジュールを使用します。このモジュールには外部アンテナが付属していますが、ヘッダー ピンはありません。したがって、ヘッダー ピンを使用する必要がある場合は、ヘッダー ピンをモジュールにはんだ付けする必要があります。
NEP-6M モジュールは、Arduino と Raspberry Pi マイクロコントローラー ボードの両方で動作します。これを行うには、次のコンポーネントが必要です:
- Arduino キット
- ジャンパー線
- NEO-6M GPS モジュール
Arduino で GPS モジュールを配線する
NEO-6M GPS モジュールには、RX、GND、VCC、および T の 4 つのピンがあります。
シリアル通信は、Arduino との主要な通信方法です。また、TX と RX はシリアル ピンとして機能します。
Arduino を GPS モジュールに配線する方法は次のとおりです。
- GPS モジュールの GND ピンを Arduino の GND ピンに接続します
- 次に、モジュールの RX ピンを Arduino のピン 3 にリンクします
- 次に、TX ピンを Arduino のピン 4 に接続します。
- 最後に、VCC ピンを Arduino の 5v ピンに接続します。
コード
モジュールを Arduino に接続したら、次のコードを Arduino UNO にアップロードします。

Arduino コード
その際、GPS モジュールの機能に合わせてコードを編集してください。
Raspberry Pi 付き GPS モジュール
U-Blox NEO-M8N GPS モジュールを Raspberry Pi で使用して、位置データを取得できます。ただし、Raspbian OS をインストールするには、Python の経験が必要です。また、Pi ボードを GPS モジュールに接続するには、Python コードが必要です。
とはいえ、このプロジェクトに必要なものは次のとおりです。
- Raspberry Pi ボード
- 電源 (Raspberry Pi 用)
- ブレッドボード
- MicroSD カードは 8 GB が望ましい
- ジャンパー線
- GPS モジュール (U-Blox NEO-M8N GPS モジュール)
作り方
まず、Raspberry Pi で UART 通信を有効にする必要があります。次に、次のコードを使用してプロセスを開始します。

- 次に、ファイルの末尾に次の行を追加します:

- 次に、ファイルを終了するには、[ctrl+x] をクリックするか、[y と Enter] をクリックして保存します。
注:UART は Raspian OS のシリアル コンソールです。したがって、その機能を無効にすることができます。また、
「/boot/cmdline.txt ファイル」を変更できます。ただし、何かを変更する前に、次のコードでバックアップを作成してください:

- 次に、次の行でテキスト ファイルを復元します。

- 次に、ファイルを閉じるには、[Ctrl+X] をクリックします。その間、[Y] と [Enter] をクリックして変更を保存できます。
- 最後に、次のコードを使用して Pi を再起動し、変更内容を確認します:

GPS モジュールの LED を使用して、動作するかどうかを確認します。 LED(黄色)が点滅している場合、GPS モジュールは動作しています。したがって、次のコマンドの実行に進むことができます:
Raspberry Pi の Serial Getty Service を無効にする
ttyAMA0 が出力の Serial0 で動作する場合は、次のコマンドを使用して無効にします:

または、作成した「Serial0」と「ttys0」をリンクする場合は、次のコマンドを使用して無効にします:

次に、reboot コマンドでシステムを再起動します。
ttys0 をアクティブ化
ttyAMA0 を無効にした後、次のコマンドを使用して ttys0 を有効にします:

「Pynmea2」と「Minicom」のインストール
「minicom」python パッケージをインストールして、GPS モジュールをリンクします。その後、以下のデータを理解できます:

また、pynmea2 Python モードをインストールして、受け取った NMEA データを実行します。

回路出力をテストする
最後に、次のコマンドで GPS の出力をテストします:

結果は次のようになります:
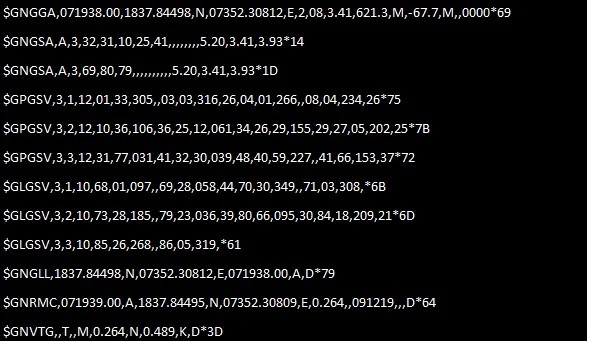
GPS 結果
次に、Python コードをログに記録して、Raspberry Pi を GPS モジュールと接続できるようにします。

最終結果は次のようになります:
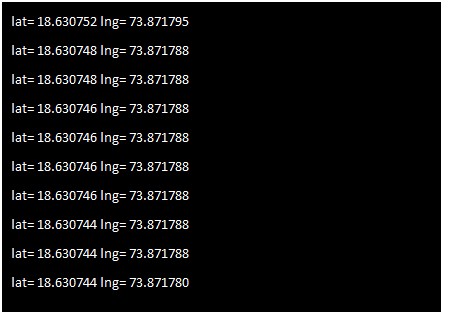
GPS 最終結果
プロジェクトに適した GPS モジュールの選択方法
前述のように、ほとんどすべての GPS モジュールは同じように機能します。ただし、使用する GPS モジュールの種類はアプリケーションによって異なります。
GPS ナビゲーション モジュールとは異なるものが必要になる場合があります。たとえば、自動操縦に GPS を使用する動きの速いプラットフォームで作業している場合は、更新速度の速い GPS モジュールが必要です。
低い更新レートで数メートルの精度が必要な場合は、基本的な GPS モジュールで十分です。
また、一定の信号が必要な場合は、外部 GPS アンテナを備えたモジュールが理想的です。しかし、精度だけが必要な場合は、リアルタイム キネティクス テクノロジを備えたモジュールを使用するのが最適です。
結びの言葉

GPS 衛星と受信機
GPS モジュールを使用すると、正確な速度で位置データを取得できます。目に見える衛星はありませんが、GPS 衛星は地球を周回して一定の精度を提供します。
さらに、GPS 衛星と受信機の間のデータ伝送も光速で行われます。そのため、プロジェクトやアプリケーションにとって高速で信頼できます。
ご不明な点がございましたら、お気軽にお問い合わせください。喜んでお手伝いさせていただきます。
産業技術