


Infinity Gears
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要なツールとマシン
|
このプロジェクトについて
アーサーガンソンは、1/50レシオギアの12ステージがすべて相互に接続された、「MachinewithConcrete」という名前の感動的な彫刻を作成しました。最初のギアは200rpmで回転し、完全な回転には1/200分かかります。最後のギア(コンクリートに埋もれている)の全回転時間は137億(10 ^ 12)年だと思います!
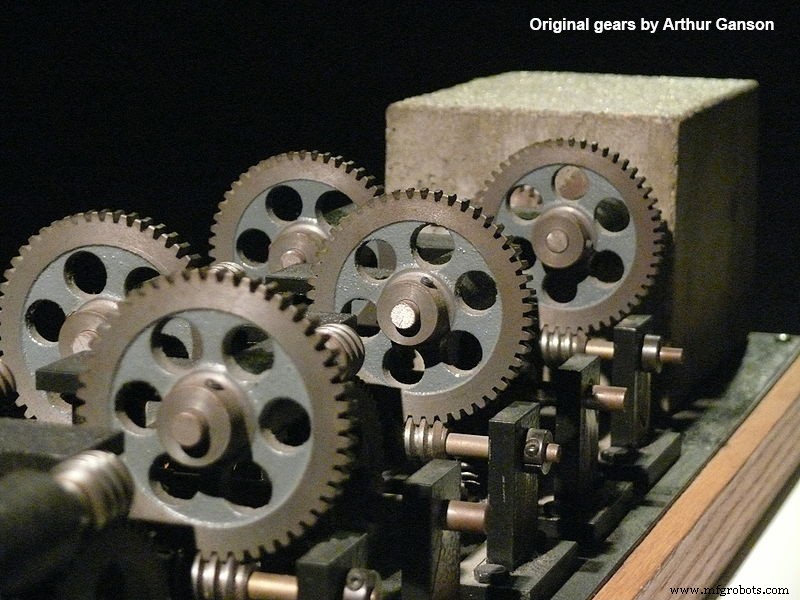
最初のギアをどれだけ速く回転させても、システム内での労力は減少します。人生は同じように感じています。私たちはたくさんのことをしますが、それらは宇宙にほとんど影響を与えません。ですから、私たちにできる最善のことは、私たちが好きなこと、そして私たちを幸せにすることをすることです!
そこで、Arduino Unoを搭載した、さまざまなステージの回転カウンタースイッチを備えた、よりコンパクトな形式の同様のプロジェクトINFINITYGEARSを作成しました。 250rpmのDCギアモーターで最初のギアを回転させます。
私たちの最後のギアの完全な回転時間を推測してください!? ------>それを待つ-------> 346 Quintillion(346 x 10 ^ 18)年!宇宙でさえ(おそらく)完全な回転を見ることはありません!そのため、最後の歯車を「回転不可能な四角歯車」として設計しました。
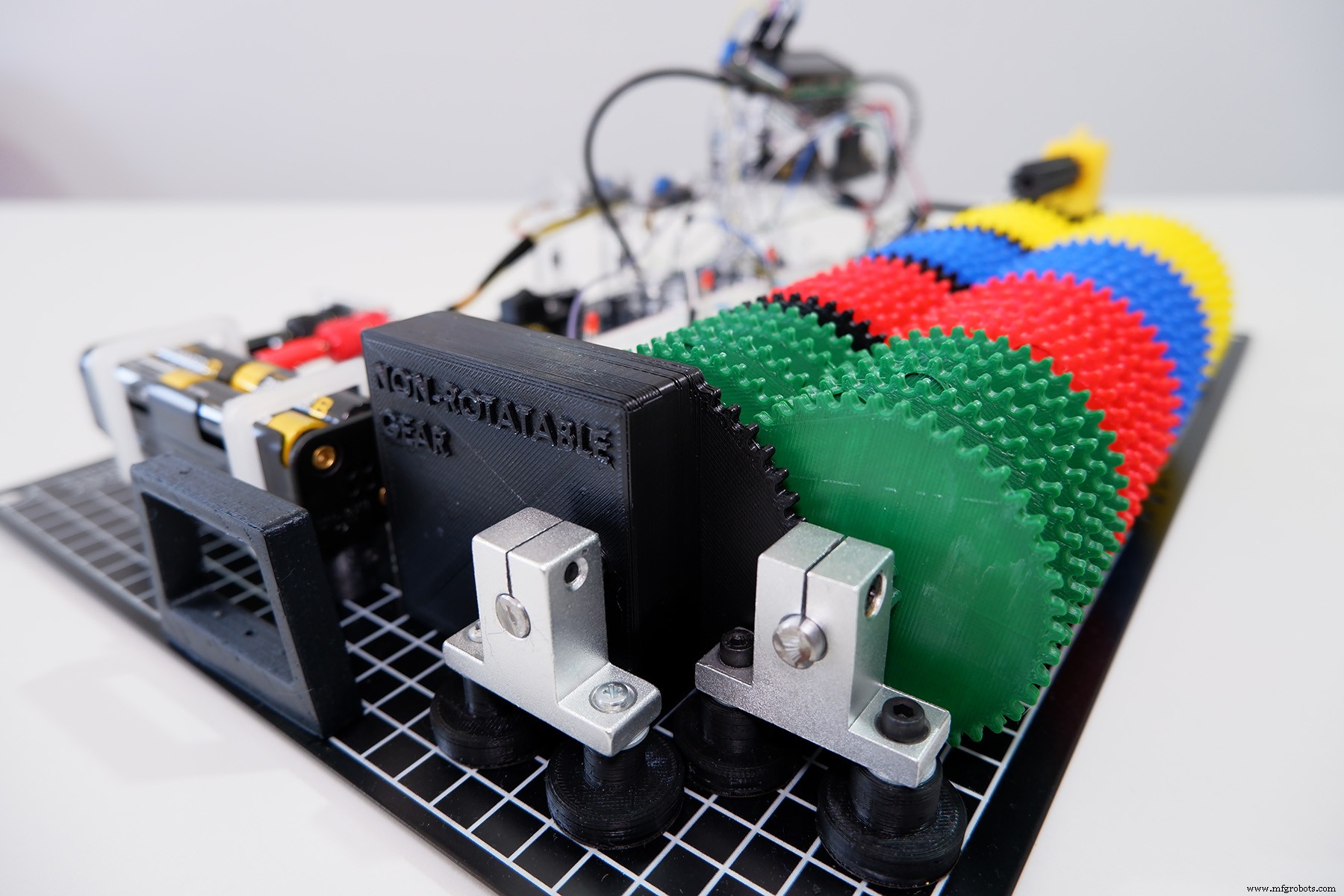
私たちのプロジェクトのすべてのギアは、小さな磁石が付いている5つの黒いギアを除いてカラーで3Dプリントされています(モーターシャフトの+1の黒いギアには磁石がありません)。それらの回転は、Arduino Uno + 2x16LCDに接続されているリードスイッチ+ LEDによってカウントされます。
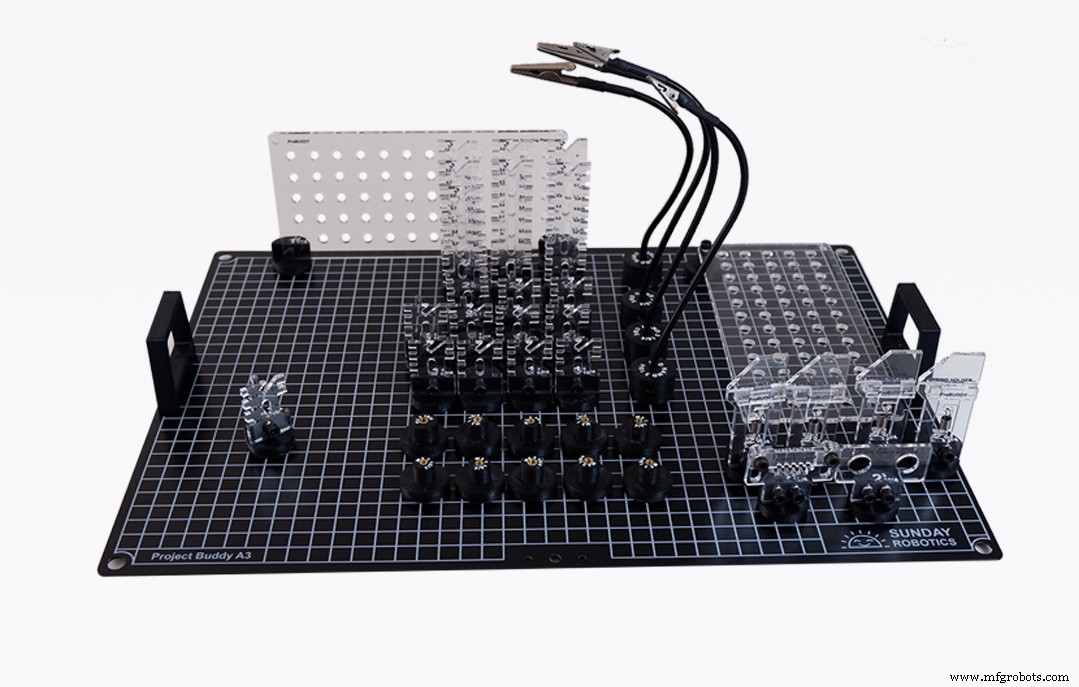
A3サイズのProBUDDYキットに基づいてプロジェクトを構築しました。これにより、プロジェクトの構築、保存、実行の際に非常に役立ち、簡単になります。 (まもなく11.01.2022のKickstarterで)製品ページ:https://www.sundayrobotics.com/probuddy/
1番目の黒歯車は0.002分で完全に回転し、簡単に見ることができます。
ただし、2番目のブラックギアは135日で完全に回転します。これだけ長く待つと..
3番目の黒歯車OMGは、360万(3.6 x 10 ^ 6)年で完全に回転します!
4番目の黒歯車、OMG、35兆(35 x 10 ^ 12)!
5番目のスクエアブラックギア、OOOOOOMMMMMMMGGGGGGG、346 Quintillion(346 x 10 ^ 18)年! (宇宙はそれが回転するのを見ますか?それについてはよくわかりません!)
コード
- ArduinoUnoコード
ArduinoUnoコード Arduino
#include/ *このライブラリは、LCD画面で使用するために含める必要があります。 * / LiquidCrystal lcd(12、11、5、4、3、2); / * LCDが接続されているArduinoピン。 * // *リードスイッチセンサーの定義。 * / int reed1 =6; int reed2 =7; int reed3 =8; int reed4 =9; int reed_status1、reed_status2、reed_status3、reed_status4; / *カウンターの定義。 * / int counter1 =0; int counter2 =0; int counter3 =0; int counter4 =0; void setup(){lcd.begin(16、2); / * LCDの行番号と列番号が指定されます。 * // * LCDの最初の行に書き込まれるテキスト。 * / lcd.setCursor(0、0); lcd.print( "SUNDAY ROBOTICS"); / * LCDの2行目に書き込まれるテキスト。 * / lcd.setCursor(0、1); lcd.print( "INFINITE GEARS"); / *リードスイッチが入力として設定されています。 * / pinMode(reed1、INPUT); pinMode(reed2、INPUT); pinMode(reed3、INPUT); pinMode(reed4、INPUT); delay(1500); / *スプラッシュ画面は1500ミリ秒待機します。 * /} void loop(){/ *リードスイッチセンサーの状態が読み取られ、その状態が変数に渡されます。 * / reed_status1 =digitalRead(reed1); reed_status2 =digitalRead(reed2); reed_status3 =digitalRead(reed3); reed_status4 =digitalRead(reed4); //リードスイッチの状態が0の場合、システムは100ミリ秒待機し、カウンターは1ずつ増加します。* / if(reed_status1 ==0){delay(100); counter1 ++; } else if(reed_status2 ==0){delay(100); counter2 ++; } else if(reed_status3 ==0){delay(100); counter3 ++; } else if(reed_status4 ==0){delay(100); counter4 ++; }} lcd.clear(); / * LCD画面を掃除します。 * / / *スプラッシュ画面の後に書き込まれるテキスト。 * / lcd.setCursor(0、0); lcd.print( "INFINITE GEARS"); / *カウンタ値は2行目に書き込まれます。 * / lcd.setCursor(0、1); lcd.print( "F:"); lcd.print(counter1); lcd.print( "S:"); lcd.print(counter2); lcd.print( "T:"); lcd.print(counter3); lcd.print( "F:"); lcd.print(counter4); lcd.print( "F:"); lcd.print(counter5); }
カスタムパーツとエンクロージャー
41個の平歯車+モーター歯車がすべて接続されます。各歯車には、外側に45個の歯があり、内側に9個の歯があります。モーターギアにも9つの歯があります。 各段階で、ギア比は1/5です。モーターギアからエンドギアまで、41段が接続されています。これで1 /(5 ^ 41)のギア比になります。
モーターギアは1/250分で完全に回転します。そして最後の(正方形の)ギアの場合、(1/250)*(5 ^ 41)=1,8x10 ^ 26分かかります!
それは3.03x10 ^ 24時間です!
それは1,26x10 ^ 23日です!
それは3.46x10 ^ 20年です!
そしてそれは346Quintillion Yearsです!
回路図
皆さん、私たちの電源は、直列に接続された8 xAAアルカリ電池です。 6VDCモーターと5VArduino Uno + LCD +残りの回路があります。したがって、これには2 xLM2596レギュレーターを使用します。 それぞれの黒い歯車には磁石があります。マグネットは全部で4つあります。それらのすぐ隣には、LEDと抵抗器およびArduinoUnoピンに接続されたリードスイッチがあります。磁石がリードスイッチのすぐ隣を通過すると、Arduinoピンで高から低、高に遷移します。
回転数を表示する2x16文字のLCDがあります。

製造プロセス