


u-blox LEA-6H 02GPSモジュールとArduinoおよびPython
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
Arduino UNO(または他のArduinoデバイス)を使用したGPSモジュール(私はLEA-6H 02を使用)のインターフェースと、Pythonで記述されたアプリケーションウィンドウに表示する緯度と経度の計算。
ステップ1:u-blox LEA-6H 02 GPSモジュールを入手し、データシートの仕様を読み、モジュールをArduinoに接続できるようにします
- u-blox LEA 6データシートを注意深く読み、モジュールが正しいことを確認してください
- ほとんどのモジュールは 〜2.7〜3.6v で動作します 、適切な電源があることを確認してください。私は Arduino3.3vピンを使用しました
- すべてのモジュールがUART通信ポートをサポートしているため、これを使用してArduinoとのインターフェースを取ります
- モジュールにはデフォルトでマイクロメスソケットが付属しており、Arduinoに接続するのが難しいため、2.54mmジャンパー線メスソケットに交換しました(交換する前に、どのピンが何をするかを確認し、ピン図を作成してください紙またはコンピューター)
- これで、このモジュールをArduinoに接続する準備が整いました
ステップ2:GPSモジュールをArduinoに接続する
GPSモジュールのTxとRxをArduinoのRxとTxに接続します
- GPSのTx(私の場合は緑色のワイヤー)から=> ArduinoのRx
- GPSのRx(私の場合は黄色のワイヤー)から=> ArduinoのTx
- GPSモジュールのTx(送信機)とRx(受信機)を識別し、Arduinoでも同じです(UNOを使用したため、UART通信ポートが1つだけで、ピン0にTx、ピン1にRx、Arduino UNOの仕様が増えました)
注意:GPSモジュールに3.3v(最大3.6v)を超えないように適用し、指示モジュールを注意深く読んでください
ステップ3:シリアル(通信)ポートを読み取るためにArduinoプログラムをアップロードする
- このプロジェクトのコードはGitHubリポジトリにあります
- リンク:https://github.com/harshgosar/LEA-6h-GPS-Arduino-Python
- README.mdファイルをお読みください
画面上の応答を観察します
- 有効な応答が得られるまでには時間がかかり、GPSモジュールが受信する信号の強度によって異なります
- GPSモジュールを窓の周囲または窓の近くに置いてください
- 上記のREADME.mdファイルに記載されているu-centerソフトウェアをインストールします
- ArduinoコードをArduinoモジュールにアップロードする
- GPSピンをArduinoに接続します
- Arduino IDEでシリアルモニターを開き、GPSモジュールの出力を観察し、価値のある出力を印刷していることを確認します
- シリアルモニターを閉じてArduinoシリアルポートを切断し、u-centerソフトウェアを開いて、Arduinoのシリアルポートを選択します
ステップ4:Pythonコードを実行する
- ローカルマシンにPythonをダウンロードして構成する
- Pythonコードをダウンロードして、マシンのシリアル通信ポートを介してGPSデータを読み取ります
- ArduinoでGPSに接続して電力を供給します
- Arduinoが接続されているCOMポートを特定します
- Pythonコードを実行する
- COMポートの詳細を入力してください
- 緯度と経度のデータを確認する
コード
Github
https://github.com/harshgosar/LEA-6h-GPS-Arduino-Pythonhttps://github.com/harshgosar/LEA-6h-GPS-Arduino-PythonLEA-6h-GPS-Arduino-Python
マイクロコントローラーにアップロードするArduinoコードとインターフェースのPythonコードhttps://github.com/harshgosar/LEA-6h-GPS-Arduino-Python 回路図
GPSとArduinoの接続画像 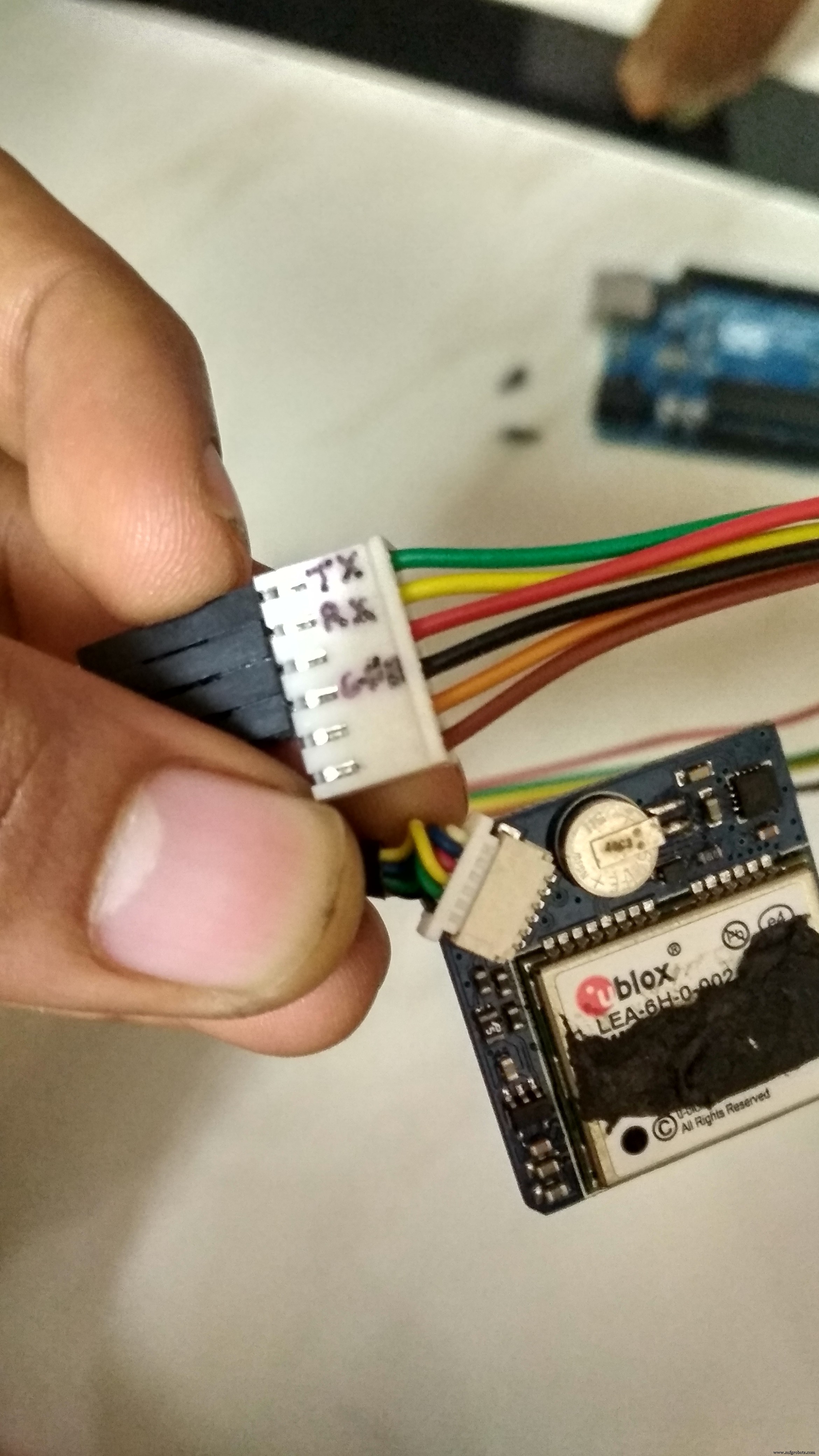 GPSとArduinoの接続Image2
GPSとArduinoの接続Image2 
製造プロセス
- RaspberryPiとPythonを使用したロボットの構築
- 例を使用して Python でモジュールをインポートする
- Arduinoで水滴をキャプチャする
- PythonでArduinoとRFIDを使用した出席システム
- LEDとピエゾスピーカーを備えたDHT11センサー
- ArduinoTemp。 3.2ディスプレイを備えたモニターとリアルタイムクロック
- ArduinoMegaをNEO-6MGPSモジュールとインターフェースする方法
- ArduinoとMPU6050によるサーボモーターの制御
- Arduinoによる音声認識と合成
- GPSおよびTFTディスプレイシールドを備えたGPSロケーションディスプレイ
- Arduino + GPSモジュール-宛先通知機能