


セルフプログラミングロボットとは何ですか?
AI、自律機能、ロボット工学を組み合わせる方法を考えるとき、ハリウッドと滑らかな脚本家は、未来が「ターミネーター」と「彼女」の間のどこかに着陸することを確信しています。人生を面白く保つためには空想の飛行が必要ですが、問題の事実は、自律的に動作できるロボットは単に世界を引き継ぐにはあまりにも有用であるということです。彼らが実際に行うことは、私たちがこれまでに知っていたよりも多くの自由を最終的に私たちに与える、長い間必要とされていた役割を果たすことです。
MITによると、自律型ロボットは「人間が明示的に制御することなく、自分たちで世界のタスクを実行できるインテリジェントなマシンです」。この文脈では、人間の制御がリミッターであることを私たちは知っていますが、限界は何ですか?
ロボットの自律性を実現するために、ロボットが超えなければならない最初の制限は、ロボット自体をプログラムする能力です。つまり、ロボットに設定された目標を達成し、人間の手動介入なしでそれを達成する方法を見つける能力です。
ロボットの自律性に向けた次のステップは、結局のところ、はるかに定性的です。ロボットの自律性のアイデアが実際に実現するのは、提供されるサービス、実行されるプロセス、生成されるデータなど、これらの品質にあります。
ロボットプログラミングは疲れ、退屈で、ひどい
真実は、今日のロボットは一般的に非常に「愚か」です。もちろん、これは形容詞ではありません。適切にプログラムされたときに何を達成できるかを考えると、非常に強力なソリューションです。すべてのロボット企業は、販売するロボットを使いやすくすることに取り組んでいます。一部のロボットスタートアップは、既存のハードウェアに加えて同じことを行うように取り組んでいますが、この分野のすべての企業は、いつの日かロボットがプログラミングできるようになることを望んでいます。彼ら自身。
なぜこれがロボット産業の一般的な目標なのですか?ロボットプログラミングは非常に退屈なプロセスであるため、これは多くの場合、ロボット工学の統合においてかなりの予算を必要とします。プロセスに精通していない人にとって、ロボットプログラミングは、多くの専門家にとっては楽しいものですが、最大6自由度、数十の潜在的なツールパスと終了位置、およびさまざまな可能な限り最も効率的なロボットモーションプログラムを生成するために、深い考慮が必要な運動学的制約。
同時に、このモーション生成プロセスは、ロボットが動作することが期待されるすべてのパーツと環境に対して手動で実行する必要があります。これは、今日まで、ロボットが輸送や消費者などの業界の企業にとって実用的であったことを意味します。エレクトロニクスですが、年間数万の高価値SKUを生み出しておらず、他の点では種類が限られているほとんどの企業にとっては実用的ではありません(特殊なアプリケーションを除く)。 製品の。
ここで、セルフプログラミング機能が製造業のゲームチェンジャーになる可能性があります。ロボットの使用に伴うコストの大部分は、ロボットをプログラミングし、そのニーズを満たすために製造スペースを構築することです。プログラミングを自動化可能なものに減らすことで、ロボットがその周囲の部品と環境の両方に適応できるようにすることが可能になります。これを達成することは、関係する部品構成やSKUに関係なく、ロボットが最終的にすべての種類のメーカーで使用できることを意味します。
「セルフプログラミング」を実現するには何が必要ですか?
ロボットのプログラミングを容易にするために、さまざまなソリューションが何年にもわたって(そして何十年にもわたって)導入されてきました。ティーチペンダント、キネマティックインストラクション、オフラインプログラミングはすべて、ロボット工学プロバイダーがエンジニア、プログラマー、インテグレーターにとってプロセスをより簡単で便利にする方法です。
最終的に、これらはすべてプロセスの一部の要素を自動化するか、少なくともそれらをより直感的にすることができますが、完全なモーションはそれぞれ、生成と検証に数時間、数日、さらには数週間かかります。もちろん、すべて高度に構造化された環境内です。

ロボットが独自のモーションを生成するために何が必要かを考えるための重要な答えの1つは、ロボットを私たちのようにするために何ができるかを考えることです。哲学的になりすぎることなく、私たち人間は私たちが知っているほとんどすべてを学ぶために私たちの感覚に依存しています。同時に、私たちの感覚は私たちが私たちの環境を解釈し、それに対応することを可能にするものです-これの多くは無意識に、反射的に、本能的に、あるいは私たちが年をとるにつれて学ばれることさえあります。
ロボットに、ロボットが応答するために必要な感覚を与える 彼らの環境、特に3D空間とテクスチャを解釈する能力により、目標を達成するためにプログラムするために必要な情報を収集できるようになります。
自己プログラミングロボットは、それ自体で、適切なアルゴリズムのセットを使用して実現できますが、どのような目的で使用するのでしょうか。ここでの本当の課題は、ロボットに従来の達成可能な目標に向けてプログラムをさせることです。つまり、人間と同じ能力を使って、既存のツールを使用してロボットを効果的にプログラムし、自動プロセスにすることです。
スプレー操作のプロセス

これはどのように起こりますか?スプレープロセスの例をとると、高品質の出力を達成するための本質的な必要性は、簡単に言えば、空間内の部品を識別して解釈する能力です。これを知ることにより、実際にプログラムを生成する適切な能力を備えたロボットは、表面をコーティングで覆う(またはサーマルガンや研磨材をスプレーする)という目標を達成できます。
一般に、この精度は、作業プロセス中に人間が持っているのと同じ鋭敏さを達成するために、1ミリメートル以下に下げる必要があります。幸いなことに、これは赤外線センサーで達成可能なレベルの精度であり、複数の角度と位置を組み合わせると、3D空間でオブジェクトのデジタルツインをレンダリングするために必要な情報を提供できます。
そこから、その種の機能により、企業は、人間の労働者にとって退屈で危険でさえあると見なされてきたタスクを自動化することができます。週に40時間、年に50週間、30年または40年間、産業用部品のスプレーとコーティングを行うことは、健康でも精神でも、最善の方法ではありません。ロボットを追加すると、他の仕事を容易にする物質的なメリットが生まれます。やることがもっと楽しくなります。
従来のロボットプログラミングと比較すると、メリットはそれほど大きくありません。ほとんどのコーティング作業では、特定の日であろうと特定の生産工程であろうと、作業が必要なさまざまな部品があります。このような状況で多くのメーカーがロボットの使用を試みて失敗しました。今日、自動車メーカーは一般にペイントロボットユーザーの大多数です。ただし、セルフプログラミングロボットでは、その故障は大幅に変化します。

センスの後、次に何が来るのか?
セルフプログラミングロボットが達成できる目標を理解したので、前から後ろへのプロセスに何が入るのかを理解することが重要です。環境感覚を生成した後、自己プログラミングロボットは、産業用ロボットの従来の要件をすべて処理する必要があり、さらに理解する必要があります。 プロセスまたはセルの固有の特性。これは、プロセスのノウハウ(たとえば、誰かの邪魔にならないようにするためにどこに踏み出すか、表面にペイントを適用するためにどのパターンを使用する必要があるか)、または正確な品質目標が優先されるようにするための基本的なソフトウェアインターフェイスを介して入力される特定の指示である可能性があります。もちろん、プログラミングは必要ありません。
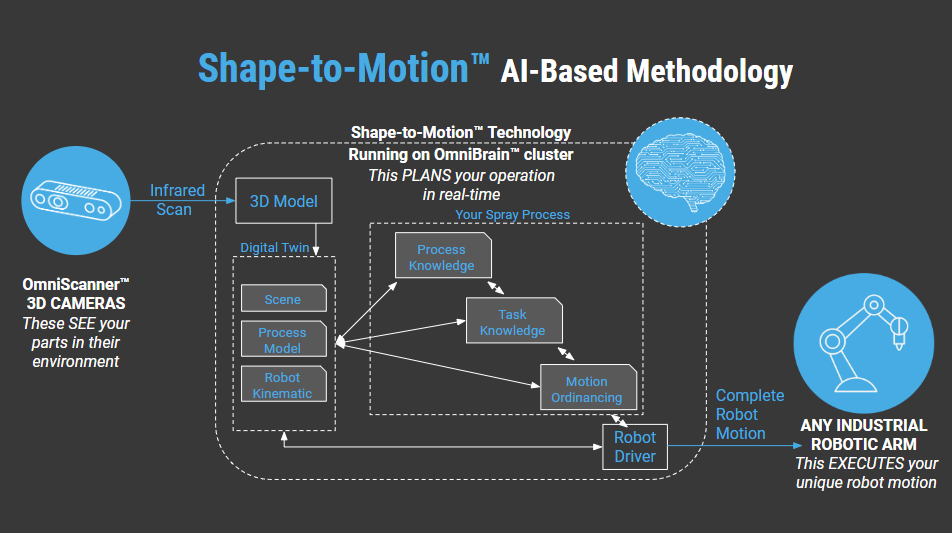
以下は、セルフプログラミングプロセスがどのように構成されているかの一例です。 OmniroboticのShape-to-Motion™テクノロジーは、3Dカメラを使用して、細胞の3Dモデルを再構築します。工場設定でプロセスコントローラに接続し、空間内のロボット自体の位置と制約を認識することにより、ロボットはプロセス知識、タスクの内訳、およびモーションオーディネーションを使用して、並列タスク計画プロセスに従事できます。各結果はデジタルツイン環境で評価され、最適な結果が得られます。場合によっては、操作ごとに10,000以上のシナリオに基づいて評価されます。
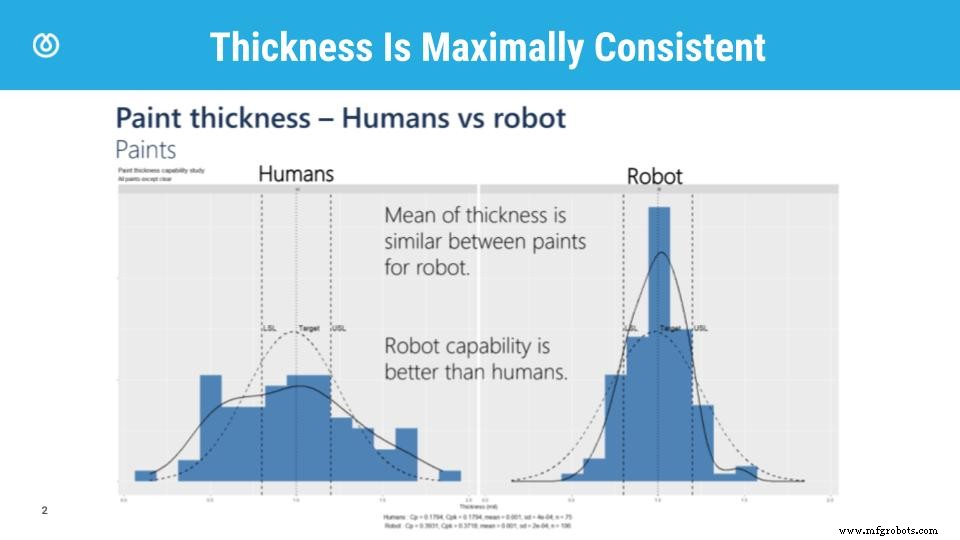
この機能を使用してタスクに優先順位を付けることにより、ロボットは、完全なプロセスにつながる一連のモーションを効果的に生成できます。ロボットは本質的に一貫性があり、予測可能であり、人間よりも長く動作できるため(もちろん、機械から予想されるように)、自己プログラミングロボットの最終的な出力は、他のどのソリューションよりもはるかに一貫性があります。
何かを作る場合は、目的を持っている必要があります
AIは一部の仕事に取って代わる可能性がありますが、すべての生産および作業プロセスで価値の高いボトルネックを自動化するプロセスでは、実際には、人間からのより創造的で革新的で直感的な仕事に対する需要が生まれます。いつの日か、これらのユニークな人間の特性を自動化する方法があるかもしれませんが、なぜそれを実現したいのでしょうか?そしてもちろん、私たち消費者は、機械によって生み出される「創造性」に同じように興味を持っているでしょうか?
もちろん、セルフプログラミングテクノロジーは、優れた映画と同じくらい想像力を刺激しますが、テクノロジーの実用的で費用効果の高いメリットに身を置くことが重要です。より効率的で効果的な生産プロセスが明らかに必要であり、記録的な失業の最中でも、熟練労働者の不足が続いています。
実際、より多くのロボットを使用することが、人々を仕事に戻すための最良の方法です。どのように、あなたは尋ねますか?生産性(したがって収益性)が向上すると、実際に新しい雇用が創出され、賃金が上昇し、特定の企業または社会のメンバーの多くが労働の成果から利益を得ることができます。将来、ロボットがビジネスと社会の両方でこれほど必要になる理由について詳しく知りたい場合は、有名なロボット工学者のロドニーブルックスによるこの素晴らしいRobo BusinesDirectトークをご覧ください。
そしてもちろん、セルフプログラミングテクノロジーが今日のスプレープロセスにどのように役立つかを理解したい場合は、メインのWebサイトをチェックすることを躊躇しないでください。
Omniroboticは、高混合スプレー仕上げプロセス向けの自己プログラミング型自律型ロボット技術の唯一のプロバイダーです。産業用製造会社にとってのセルフプログラミングロボットのユニークな利点を理解したい場合は、sales @ omnirobotic.comに連絡するか、回収計算機を確認してください。
産業用ロボット