


危険な環境での協調ロボティクス
技術は近年長い道のりを歩んできました、そしてとりわけ、生産プロセスを最適化して改善することを可能にし、そして職場での安全性の改善をもたらしました。 ロボット工学が直面している大きな課題の1つ 今日は、作業環境を改善し、安全な環境を実現することです。一般に、産業プロセスの自動化により、オペレーターはより安全に作業できるようになり、作業条件が改善されます および危険な環境からそれらを削除します 。
このブログでは、コラボレーティブロボティクスによって危険なタスクを自動化された方法で実行できることを確認します。これにより、これらのプロセスがより高速で安全な方法で実行され、オペレーターのリスクが大幅に軽減されました。
協働ロボットとは何ですか?
「コボット」とも呼ばれる協働ロボットは、同じ職場のオペレーターと連携するように作成されたため、それぞれがもたらす利点を組み合わせることができました。
協働ロボットは、さまざまなタスクを実行するためにあらゆる種類の工場に広く配備されています。これらは、デジタル化とインダストリー4.0の重要な要素です。協働ロボットを使用すると、製品に付加価値をもたらさない面倒な作業を自動化できます。なんらかの形で言えば、協働ロボットは作業者のアシスタントの役割を果たします。

従来のロボットタスクを実行するだけではありません ただし、カメラ、温度センサー、力センサーなどのさまざまなセンサーも追加します など、はるかに複雑なタスクを実行できます。これまで、自動化された方法で実行することは考えられませんでした。つまり、ロボットは賢くなる 。
協働ロボットの利点
協働ロボットには、あらゆる種類の環境や、産業用ロボットでは解決できないその他のタスクに使用できるという大きな利点があります。
- 複雑な電気設備は必要ありません 実質的にすべてのコンセントに接続できます。組み立ては簡単で直感的です。
- 非常に柔軟性があります および再配置可能 生産スケジュールを変更せずに新しいタスクに。また、プログラムを再利用して、同じ生産ラインで複数のタスクを自動化することもできます。
- コボットプログラミングは非常に直感的です 実装が簡単です。
- コボットは、あらゆる種類の産業や環境で使用できます。さらに、多数のタイプのエンドエフェクターをサポートします 各タスクに効率的かつ迅速に適応します。
- 安全 および怪我の原因となるプロセスと重いタスクの自動化を許可する プロセスに価値を付加しないでください。
ご覧のとおり、協働ロボットには、多くのタスクを自動化するのに適した利点があります。その中には、人々にとって危険で退屈な作業が含まれます。
協働ロボットと危険なタスク
協働ロボットは、危険な部品の取り扱いや過酷な作業など、潜在的に危険なタスクを引き受け、人々を危険にさらす可能性があります。 環境 、または不十分な人間工学によって引き起こされた怪我 。ロボット工学は、セキュリティの強化を可能にするため、この点で大きな可能性を秘めています。 。ロボットは、人間が実行できない、または高いリスクを伴う、反復的で危険なタスクを実行できます。また、限られたスペースや極端な環境でタスクを実行することもできます。
危険な環境では、自動化する必要性、またはリスクを伴うために自律的に実行する必要性を生み出す多くの課題がまだあります。このため、完全自律型と遠隔操作型の両方のロボットシステムが開発されています。
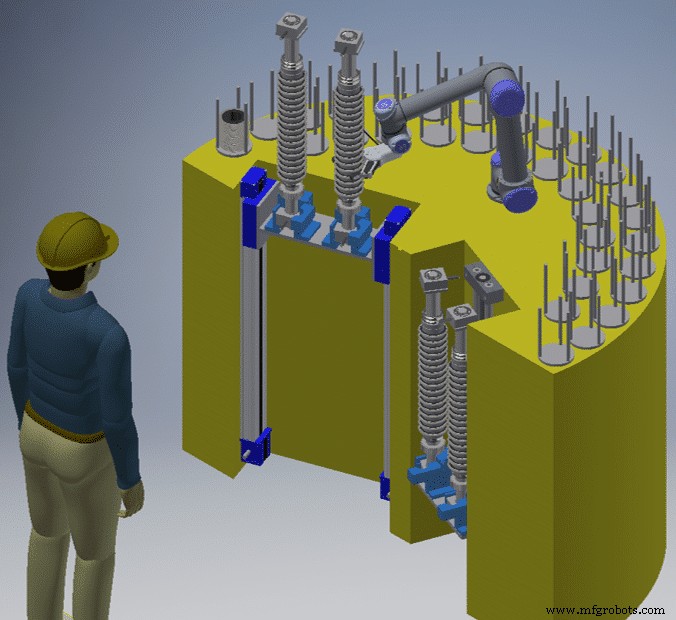
近年、ロボットの進歩は、インテリジェントセンサー、人工知能、モジュール式機械システムの開発に基づいています。したがって、完全に自律型ロボットシステムがあります 外部刺激に反応し、障害物を避け、軌道を修正するなど、高温などの危険な環境で機能する可能性があります エリアまたは危険物の取り扱い。たとえば、ここではプロジェクトを見ることができます ブレードの取り扱いは、オペレーターにとって非常に高いリスクでした。
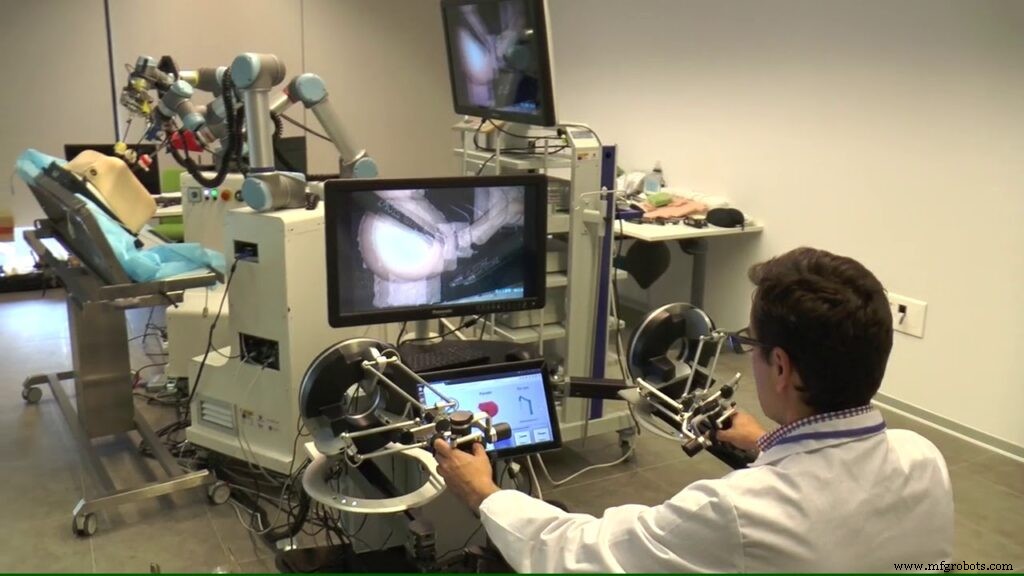
一方、遠隔操作システムがあります 触覚入力デバイス(マスター)を介してロボット(スレーブ)の制御を人に提供します。現在、特定のメカトロニクスツールの準備と、復旧シナリオや障害分析モードなどのロボット介入を容易にし、このタイプのシステムを制御する人々のトレーニングを可能にするシミュレーションシステムとバーチャルリアリティがあります。遠隔操作ロボットの例としては、ドローンや医療分野で操作を行うために使用されるロボットなどがあります。
危険な環境での自律型ロボット
協働ロボットに加えて、完全自律型ロボットについてもお話ししたいと思います。 原子力発電所や石油プラットフォームなどの危険な環境で作業するエネルギーなどの多くの分野で 、修理およびメンテナンスを実施する必要があります 労働者にとって潜在的な危険であるタスクで。その他の場合、操作は手の届きにくい場所で実行する必要があります 人々がアクセスすることはできません。このために、非常に多様な構成の自律型ロボットが使用され、危険な環境で移動および移動し、労働者にとってリスクとなるタスクを実行することができます。これらのロボットは、高度な精度と柔軟性で修理および保守タスクを実行できます。

このタイプの最も有名な開発の1つは、ボストンダイナミクスのロボット犬であるスポットです。 、これはすでに実際の環境で使用されています。スポットは、ポンプの警報場所での検査や化学ガスの漏れなど、潜在的に危険な環境で使用するように設計されています。

つまり、ロボット工学の進歩により、人にリスクをもたらすタスクを自動化できるようになり、危険な環境での作業も可能になっていることがわかりました。このテクノロジーは、将来、より正確でアクセスしやすくなる可能性があります。
いずれかのプロジェクトの危険な環境にロボット工学を適用しますか? お問い合わせください!
産業用ロボット
- 実世界のロボット工学におけるAI
- 次の章:コラボレーティブロボティクスの使用の拡大について知っておくべきことすべて
- 自動車製造におけるロボット工学
- 航空宇宙および防衛製造におけるロボット工学
- Veo Roboticsは、すべての産業用ロボットを協調的にすることができます
- 「熱狂的なレート」で購入されている協働ロボット
- コラボレーティブロボティクス市場は2030年までに80億ドルに成長する予定です
- ExRoboticsと横河電機が危険な環境を検査するためのロボット工学を開発
- なぜ協働ロボットを使うのですか?
- コボットと製造業における高度なロボット工学の未来
- ABBRoboticsが最初の協働ロボットを発表