


ロボット用途向けポジショナーの究極のガイド
ロボット ポジショナーが必要だと思いませんか?どちらがあなたに最適ですか?
さまざまな軸、ペイロード、および構成を備えた、利用可能なポジショナーの膨大な選択肢があります。アプリケーションのニーズに適したポジショナーをどのように判断しますか?
ロボット ポジショナーの概要 - 概要と知っておくべきこと
アプリケーションに適した産業用ロボットを選択するのは非常に困難です。ロボットの最高のリーチ、最高のペイロード、最高のブランドを検討して、ニーズに最適なモデルを見つける前に、おそらく何十もの異なるロボット モデルを検討したことでしょう。
すべての決定が終わり、プロセスの自動化を開始できると思ったとき、新しい決定が下されます:ロボットポジショナーが必要ですか?
経験豊富なロボット インテグレータと作業している場合、彼らに決定を任せたくなるかもしれません。彼らの専門知識は、あなたが正しい選択をするのを助けるために確かに重要です.ただし、ロボット ポジショナーの内外を自分でよく理解することをお勧めします。
ポジショナーを正しく使用すると、ロボット アームの機能を大幅に向上させることができます。ほんの少しの知識があれば、ロボット アプリケーションを最大限に活用できます。
この記事では、ロボット ポジショナーの全体的なガイドを提供し、十分な情報に基づいた決定を下すのに十分な情報を提供します。
ロボット ポジショナーとは
ロボット ポジショナー (別名ワークピース ポジショナー) は、ロボットの機能を拡張するために産業用ロボットと連携して動作する 1 つまたは複数の軸を備えたプログラム可能なメカニズムです。ワークピースはロボットポジショナーに取り付けられ、ロボットから独立して制御できるため、柔軟性が向上します。
ワークピースポジショナーには、さまざまなサイズ、タイプ、および構成があります。それらは、最も単純な単軸ターンテーブルから、複数のプログラム可能な軸の最も複雑なカスタマイズされた組み合わせにまで及びます。
ワークポジショナーの基本的な目的は、ロボットのワークスペースを拡大することです。これにより、ロボット自体が直線トラック、曲線トラック、またはガントリー クレーンに取り付けられる他の補助軸と同様になります。ただし、これらの補助軸とは異なり、ロボットではなくワークそのものが動く部品です。補助軸でオフライン プログラミングを使用するためのガイドについては、以前の記事を参照してください。
あなたのアプリケーションはロボット ポジショナーに適していますか?
ポジショナーを検討する際に最初に判断したいことは、アプリケーションが適切かどうかです。多くのロボット アプリケーションは追加の自由度 (DoF) を必要とせず、ロボットだけで実現できます。
これについて考え始めるには、「現在、ロボットのワークスペースによってこのアプリケーションが制限されていますか?」と自問することをお勧めします。
もしそうなら、ポジショナー (または別の補助軸) があなたに適しているかどうかを調べる価値があります.
おそらく、ポジショナーが日常的に使用される最も一般的なアプリケーションは、ロボット溶接とロボット加工です。これらのタスクでは、ロボット自体の 6 DoF すべてを使用してツールを正確に配置します。別の方向からワークにアプローチする余裕はほとんどありません。その結果、より複雑な形状の部品を溶接または機械加工する場合、ポジショナーが必要になることがよくあります。
その他の一般的なタスクには、塗装、コーティング、および検査が含まれます。
ロボット ポジショナーを使用するあまり知られていない 3 つのメリット
ロボットのワークスペースを拡張することは、確かにポジショナーを選択する説得力のある理由です。ただし、あまり目立たないその他の利点もあります。
<オール>- 省スペース — 直観に反しますが、ポジショナーを使用すると、ロボット セルが使用するフロア スペースを実際に削減できます。たとえば、ワークピースをベンチに配置して別のタイプの補助軸を使用する場合と比較してです。
- 高い耐荷重 — 一部のポジショナは、巨大で重いワークピースを処理できます。どのようなタスクであっても、負荷を処理できるポジショナーが存在する可能性があります。
ロボット ポジショナーの 5 つの一般的なタイプ
ロボット ポジショナーには多くの種類がありますが、最も一般的なものを次に示します。
1.ターンテーブル
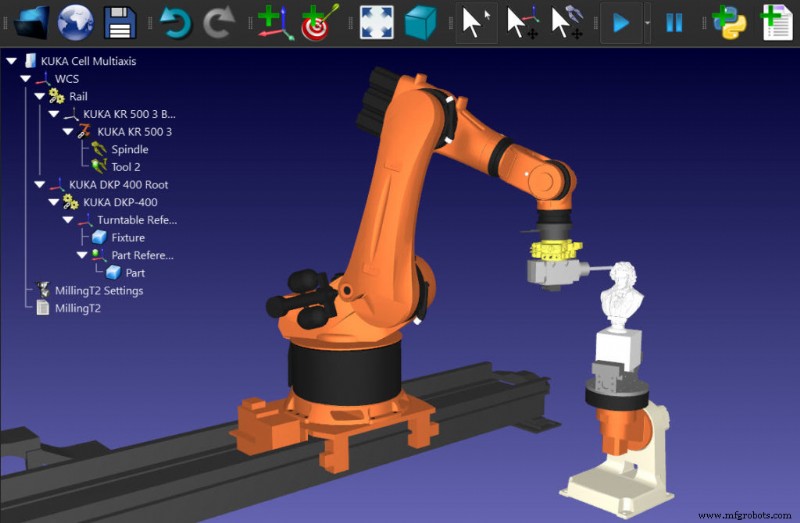
最も基本的なタイプのポジショナーであるターンテーブルは、床または作業台に置かれ、ワークピースを 1 つの軸 (垂直軸) だけを中心に回転させます。これらは、RoboDK を使用した Protolab プロジェクトで見たように、ロボットのミリングで一般的に使用されます (このビデオではターンテーブルが動いているのは見られません)。
2.単軸ポジショナー
ターンテーブルは、単軸回転ポジショナーの特定のタイプにすぎません。ただし、ほぼすべての方向に対応する単軸ポジショナーが存在します。最も一般的な方法は、旋盤と同様の方法でワークピースを水平軸を中心に回転させます。
3.ヘッドストックとテールストック
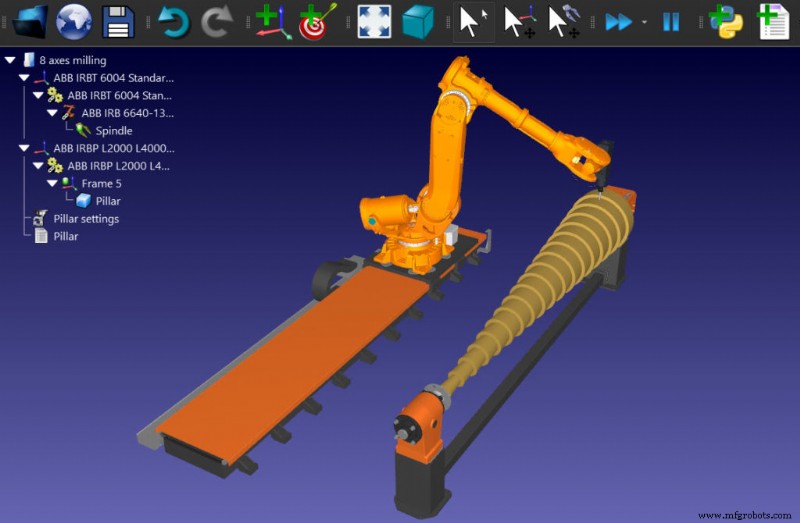
ワークピースが 1 つのポジショナーには長すぎるか重すぎる場合、一般的なアプローチは、2 つの単軸ポジショナーを組み合わせて、ワークピースの両端に 1 つずつ固定することです (主軸台と心押し台として知られています)。制御は同期されるため、単一のポジショナーと同じくらい簡単にプログラムできます。
4.多軸ポジショナー
ここが複雑なところです。ほぼすべての構成と向きでポジショナーを見つけることができます。 2 つのプログラム可能な軸を同じポジショナーに組み合わせるのが最も単純ですが、最も複雑なものは、必要な数の軸でカスタマイズできます。
5. 3 軸 (観覧車) ポジショナー
非常に一般的なタイプの多軸ポジショナーは「観覧車」です。これには、独立して動作する 3 つのプログラム可能な軸が含まれます。正しく操作するには、両側に同じ重量を持たせてバランスを取る必要があります。これは通常、同じタイプのワークピースが 2 つあることを意味します。
最適なロボット ポジショナーの選び方
最適なポジショナーは、アプリケーションのニーズによって異なります。
次のような質問を検討する必要があります:
- ロボットとポジショナーを収めるにはどのくらいのスペースが必要ですか?
- ワークピースの形状は?
- 単一のポジショナーにはワークピースが大きすぎたり重すぎたりしませんか?
- どのスタイルのポジショナーが最も理にかなっていますか?
- ポジショナーに必要なペイロードは?
最適なタイプのポジショナーを決定したら、ロボット ポジショナーのさまざまなメーカーを調べて、適切なモデルを見つけてください。
RoboDK のロボット ライブラリには、ABB と KUKA の多くのポジショナーが既に含まれています。ただし、要求に応じて RoboDK に喜んで統合するポジショナーのプロバイダーは他にもあります。
また、独自のポジショナーを作成して、ロボットと同期させることもできます。 RoboDK ソフトウェアを使用すると、好みの設定に従って外部軸の動きを最適化することもできます。
ロボット ポジショナーが役立つと思われるタスクは何ですか?以下のコメントでお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションに参加してください。
産業用ロボット
- デジタルカッティングマシンを購入するための究極のバイヤーズガイド
- ロボットポジショナー:溶接アプリケーションにおけるそれらの重要性の理解
- 自動化アプリケーションにロボットビジョンを使用する利点
- 航空宇宙産業における5つのロボットアプリケーション
- メーカー向けソーシャルメディア:究極のガイド[eBook]
- 製造業におけるロボット溶接の究極のガイド
- ロボットパレタイザーの究極のガイド
- サポートを使用した 3D プリントの設定:究極のガイド
- Ultiboard – 初心者向けの究極のガイド
- Bluetooth通信プロトコル–学習者向けの究極のプロトコルガイド
- ロボット アプリケーションのマシン ガード