


ロボット加工に使用する CNC ツールパス ソフトウェア
市場にはさまざまな CNC ツールパス ソフトウェア パッケージがあります。しかし、それらすべてがロボット加工に適しているわけではありません。
生成されたツールパスで従来の CNC マシンではなくロボットを制御したい場合、どのような選択肢がありますか?
ロボットを簡単かつ効率的に制御するには、いくつかの重要なソフトウェア機能が必要です。さらに、機械加工ロボットを最大限に活用したい場合は、考慮すべき重要な点がいくつかあります。
ロボット加工用の CNC ツールパス ソフトウェアのクイック ガイドです。
CNC ツールパスとは?
CNC ツールパスは、コンピューター制御の切削工具がワークピースを通過する経路です。ツールパスは、機械加工された材料の正しい切削速度を確保して目的の表面仕上げを実現するように注意して計画する必要があります。

CNC ツールパスをプログラミングする従来の方法は、機械加工専用のプログラミング言語である G コードを使用して手動でコーディングすることでした。このプログラミング言語は、今日でもほとんどの機械加工操作の基盤となっています。
ただし、最近では、コンピュータ支援加工 (CAM) ソフトウェアを使用して、部品の 3D モデルから必要な G コードを自動的に生成することがはるかに一般的になっています。次に、この G コードは CNC マシンに送信され、CNC マシンは命令を使用してパーツを機械加工します。
CNC のツールパス:ロボット加工にどのように適合するか
ロボット加工は、従来の CNC マシンの代わりにロボットを使用するコンピューター制御の加工方法です。特定の機械加工タスクでは、柔軟性の向上やより大きなワークピースでの作業能力など、従来の機械よりもいくつかの利点があります。
機械加工タスク用にロボットをプログラミングする場合、通常は従来の CNC 機械加工と同じプロセスを使用します。
このプロセスは次のとおりです。
<オール>CNC マシンは G コードをネイティブに理解するため、この 3 番目のステップは通常非常に簡単です。生成された G コード ファイルをマシンにコピーするだけです。
ただし、ロボットは G コードをネイティブに理解するわけではありません。それらは通常、メーカー独自のプログラミング言語を使用してプログラムされます。
そのため、専用のロボット プログラミング ツールを使用して、機械加工タスク用のロボットを迅速かつ効果的にプログラミングする必要があります。

利用可能な CNC ツールパス ソフトウェア
CNC ツールパス ソフトウェアには、無料のソフトウェア (愛好家を対象とすることが多い) から業界向けの高価なパッケージまで、さまざまなオプションがあります。
一般に、ツールは CAD/CAM ソフトウェアのカテゴリに分類されます。つまり、パーツの 3D モデルの構築と G コード ツールパスの生成の両方に使用できます。
ほとんどのソフトウェアの問題は、ロボット加工のサポートが含まれていないことです。これは、プログラムをロボットに統合するために余分な作業を行う必要があることを意味します...そして、この作業は重要になる可能性があります!
ロボット加工を容易にするツールを選択しない限り…
統合ロボット CNC ツールパス ソフトウェア
ロボット加工用の簡単で信頼性の高いツールを探している場合は、オプションがあります。
RoboDK は、数十のロボット メーカーの数百のロボット モデルをサポートする専用のロボット プログラミング ツールです。
その多くの機能とサポートされているアプリケーションの中で、RoboDK には統合された機械加工ウィザードが含まれており、ソフトウェア自体で CNC ツールパスを操作できます。
また、多くの一般的な CAD/CAM パッケージ用のネイティブ プラグインも備えています。これは、制作ワークフローに簡単に追加できることを意味します。
生成された CNC ツールパスを機械加工ツールにロードするだけで、RoboDK が機械加工操作用のロボット プログラムを自動的に生成します。プログラムを物理ロボットに送信する前に、ソフトウェアのシミュレーション機能を使用して動作をテストすることもできます。
RoboDK のマシニング ツールの 3 つの非常に便利な機能
RoboDK の特徴的な機能のいくつかは、ロボット加工用のツールとして特に役立ちます。
使用する可能性が高い上位 3 つの機能は次のとおりです。
ツールパスを視覚化する
「G コード シミュレータ」と呼ばれるソフトウェア ツールのカテゴリ全体があります。これらは、CNC マシン自体に送信する前に、生成されたツールパスを視覚化できるようにするために存在します。
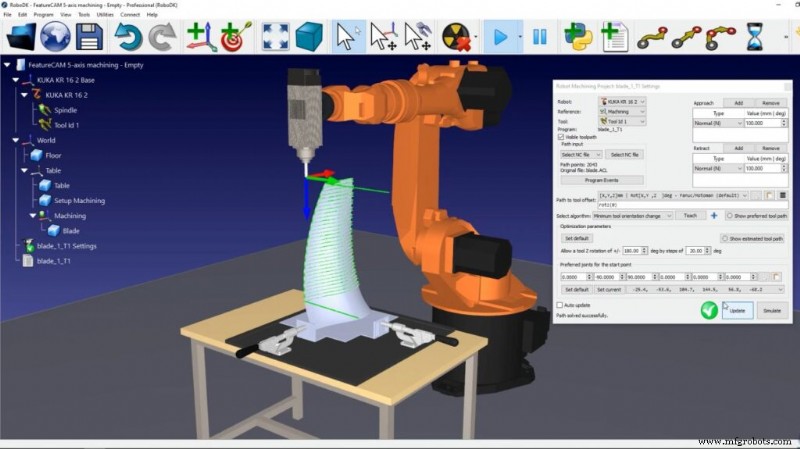
RoboDK を使用すると、追加の G コード可視化ツールは必要ありません。統合されたマシニング ウィザードは、RoboDK 自体の内部でツールパスの視覚化を生成します。また、ロボットがこのツールパスに沿ってどのように移動するかも示しています。
衝突回避
ロボットと CNC マシンの違いの 1 つは、ロボットの方が衝突の危険性が高いことです。ワークスペースが柔軟であるため、環境、ワークピース、またはワークスペース内の他のオブジェクトと衝突する可能性があります。
RoboDK は、機械加工タスク中に発生する可能性のある衝突を自動的に検出します。これはシミュレーション段階で行われるため、プログラムが物理ロボットに送信される前にこれらの衝突を修正できます。
特異点を解く
特異点は、ロボットやその他の複雑な機械構造に固有の問題です。それらは、ロボットのプログラムがロボットに物理的に不可能な動きをするように指示しようとしたときに発生します。いくつかの異なるタイプの特異点が発生する可能性があります。
RoboDK を使用して機械加工タスクをプログラミングすることで、特異点が問題になる前に解決できます。このソフトウェアは、特異点を自動的に検出して解決します。
Machining Wizard で CNC ツールパスを視覚化する方法
RoboDK の加工ウィザードの使用を開始する最良の方法は、ダウンロード ページで無料の試用版をダウンロードすることです。
ドキュメント ページで、ロボット加工プロジェクトの例、ビデオ チュートリアル、詳細な実用的なガイダンスを見つけることができます。
現在使用している CNC ツールパス ソフトウェアは何ですか? 以下のコメント欄でお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、youtube、または RoboDK フォーラムでのディスカッションにご参加ください。
産業用ロボット