


柔軟なポリ(フッ化ビニリデン)圧電フィルムに基づく超高感度ひずみセンサー
要約
柔軟な圧電ポリ(フッ化ビニリデン)(PVDF)フィルムに基づいて、16マイクロスケールの容量性ユニットを備えた柔軟な4×4センサーアレイが実証されています。 PVDFの圧電性と表面形態は、光学イメージングとピエゾ応答力顕微鏡(PFM)によって調べられました。 PFMは位相差を示し、PVDFと電極間の明確な界面を示します。電気機械的特性は、センサーが優れた出力応答と超高信号対雑音比を示すことを示しています。出力電圧と印加圧力は、12 mV / kPaの傾きと線形関係にあります。ホールドアンドリリース出力特性は2.5μs未満で回復し、優れた電気機械的応答を示します。さらに、隣接するアレイ間の信号干渉が理論的シミュレーションによって調査されました。結果は、0.028 mV / kPaの速度で圧力を下げると干渉が減少し、電極サイズに応じて拡張性が高く、178kPa未満の圧力レベルでは重要ではなくなることを示しています。
背景
ポリ(フッ化ビニリデン)(PVDF)は、化学的に安定した圧電ポリマー材料であり、焦電、圧電、および強誘電特性のためにさまざまな分野で多くの用途があります[1、2]。特に、優れた機械的特性(ヤング率2500 MPa、ブレークポイントでの強度〜50 MPa)により、PVDFに基づく圧力センサーは、柔軟性や耐疲労性などの優れた機械的特性を示します[3、4]。強誘電性PZTファミリー材料に基づく一般的に使用される圧力センサーと比較して、PVDFベースの圧力センサーは無毒で生体適合性があります[5、6]。最も重要なことは、PVDFフィルムの柔軟性係数が高く、複雑なひずみ検知に必要な形状にすることができるため、PVDFベースのセンサーはPZTベースのセンサーよりも柔らかくて丈夫でした[7、8]。したがって、PVDFベースの圧力センサーは、生物医学分野の急速な発展における圧力特性評価のための潜在的な柔軟なバイオセンサーの1つであると考えられています[9、10]。シャルマら。 PVDFフィルムを備えたスマートカテーテル用の圧力センサーを設計しました。リアルタイムの圧力測定のためにカテーテルに統合することができます[11]。バーク等。 PVDFに基づいてドライバーの手のひらからの心臓の脈波信号を非侵入的に測定する脈波センサーシステムを開発しました。結果は、センサーシステムが心拍変動分析のための明確な脈波信号を提供できることを示しています。これは、交通事故を回避するためにドライバーの警戒状態を検出するために使用できます[12]。 Lee etal。 PVDFとZnOのナノ構造を備えたセンサーを製造し、人工皮膚の圧力と温度の変化を検出することができました[13]。ただし、センサーは、大きな寸法の1点でのみ圧力を検出します。
人体の圧力を検出するためのパッチを当てたバイオセンサーなどの実際のアプリケーションでは、マルチポイントセンシング、構造上の柔軟性、および超高感度が求められます[14、15、16]。この報告された研究では、圧電PVDFフィルムに基づく4×4の柔軟なセンサーアレイが実証されており、12 mV / kPaの超高感度と2.5μsの高速出力応答を示しています。人間の指にかかる圧力の大きさと空間分布が特徴づけられます。
設計と実験
センサーアレイの設計と製造
提案されているセンサーアレイは、厚さ約50μmのPVDF薄膜をベースにしたサンドイッチ構造になっています(Jinzhou Kexin Inc.、中国)。厚さ20μmのアルミニウム電極アレイは、PVDFフィルムの両面で覆われていました。図1aは、センサーの概略設計を示しています。センサーには16個のマイクロコンデンサーユニットがあります。電極線の量を最小限に抑えるために、4ユニットごとに1本の接続線を共有しています。
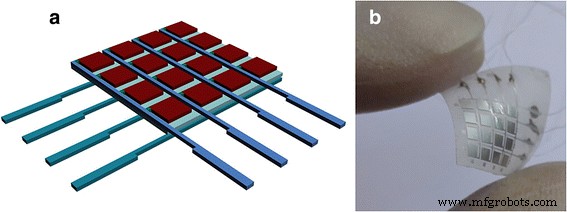
a センサーアレイの概略図。 b 究極のデバイスの物理的な画像
センサーアレイを製造するために、ポリジメチルシロキサン(PDMS)で覆われたスライドガラスを堅い基板として準備しました。両面をAlで覆ったPVDF薄膜を基板に載せた。次に、フォトレジストをフィルムの表面に3000rpmの速度で40秒間スピンコーティングしました。マスクアライナシステム(ABM、Inc.、USA)によるAlのフォトリソグラフィーとウェットエッチングの後、4×4の正方形構造の16個のコンデンサーユニットを準備しました。その後、PDMS基板上のフレキシブルセンサーをスライドガラスから取り出しました。各コンデンサの電極は、銀の接着剤を介して導線に接続されていました。良好な生体適合性を得るために、センサーの上部をPDMSで覆ってパッケージ化し、60°Cで12時間加熱しました。図1bは、曲がった圧力センサーの写真を示しており、センサーが柔軟であることを示しています。
PVDFフィルムに基づくセンサーアレイの圧電特性
圧電応答力顕微鏡(PFM)研究(セイコー、日本)を実施して、2 VのACバイアス電圧、2×のスキャン領域サイズで、提案されたセンサーのPVDFフィルムの表面形態と圧電特性を特性評価しました。 2μm 2 。
センサーアレイのキャリブレーション
センサーを較正するために、National Instrumentsのデータ取得(DAQ-USB6008)機器に接続する電気機械実験プラットフォームで、提案されたセンサーにさまざまな圧力をかけました。 4つの差動アナログ信号によるデータ取得は、差動モデルで設定されました。提案されたセンサーからの出力電圧信号は、センサーアレイとDAQの間の接続を変更することによって得られました。
結果と考察
図2aは、光学顕微鏡で確認した、Alのエッチング後のセンサーの表面形態を示しています。かなり明るいコントラストと暗いコントラストは、PVDFとエッチングされたAl電極の間の明確な界面を示唆しています。図2b、cは、圧力センサーのPVDFフィルムの表面形態と位相信号を示しています。 PVDFの表面は組織構造で滑らかであることが示されています。図2cのPFM測定の位相画像は、図2bに見られる表面構造と一致する圧電ドメインの強い応答を示しています。これらの結果は、PVDFフィルムに基づいて調製されたままのセンサーが優れた圧電性を示すことを示唆しています。
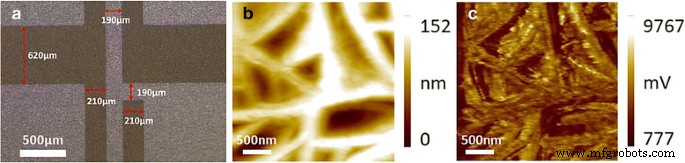
a エッチング技術後の提案されたセンサーの表面形態。 b 表面形態と c センサーのPVDFフィルムの位相PFM画像
センサーの四角い電極の1つに98.1kPaの一定圧力を加えたときの、出力信号の典型的な結果を図3aに示します[17]。 x -軸と y -軸は、センサーの二乗電極の時間と出力電圧をそれぞれ示します。出力電圧は、センサーのPVDFフィルムによって生成された電荷(Q)から変換されました。圧電方程式に基づく( d 33 は、分極の方向が電界の方向およびF Z と同じである場合の圧電定数です。 z に圧力がかかることを意味します - d と同じ方向の方向 33 )、出力電圧と圧力の関係を確立することができます。生データは、49〜51Hzのバンドブロックを適用して取得されました。この図の矢印の線は、センサーに加えられた圧力によって生成された約123.1mVの信号を示しています。圧力によるセンサーの出力電圧は、低ノイズで信号対ノイズ比が高い信号に明確に示されます。センサーアレイの同期特性を確認するために、113.2kPaの等しい圧力をセンサーの4つのユニットに同時に適用しました。圧力によって誘導される出力電圧信号を図3bに示しました。センサーの4つのユニットから同時に約190mVのほぼ同じ出力値が得られました。これは、センサーアレイが多点圧力を加えることによって高い安定性と同期特性を示したことを示しています。センサーアレイのキャリブレーションでは、60〜150kPaの範囲のさまざまな圧力がセンサーアレイに適用されました。出力電圧と印加圧力の関係を取得し、図3cに示す検量線としてプロットしました。これは、線形の関係を示しています。線形曲線の傾きは約2.9mV / kPaであり、検量線には-159.2mVのオフセットがあります。
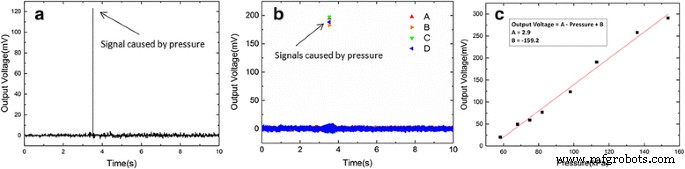
a のフィルタリングされた出力電圧 電極の正方形と b センサーアレイの4つの電極の正方形。 c 提案されたセンサーのライナー検量線適合
センサーの1つの四角い電極のホールドアンドリリース出力応答は、さまざまな周波数でインパルス圧力を適用することによって得られました。図4aにプロットされた曲線は、90Hzの周波数で約75.1kPaのインパルス圧力を適用した場合のセンサーの一般的な応答を示しています。正の出力電圧はセンサーアレイの電極二乗の圧縮に対応し、負の出力電圧は緩和に対応します。図4aの挿入図に見られるように、同様のホールドアンドリリース出力応答は、裸の圧電PVDFフィルムでも観察されています[18]。センサーの出力電圧の応答時間は2ミリ秒未満です。これは、センサーが優れた電気機械的応答特性を示していることを示しています。 60〜150kPaの範囲の衝撃圧力がセンサーアレイに適用されました。ホールドアンドリリースの出力応答曲線を図4bに示しました。センサーは、さまざまな圧力下で約2 msの応答時間で電気機械的応答の安定した特性を示し、さまざまな圧力下でのセンサーの出力電圧は、上記で得られた線形検量線と一致しています。
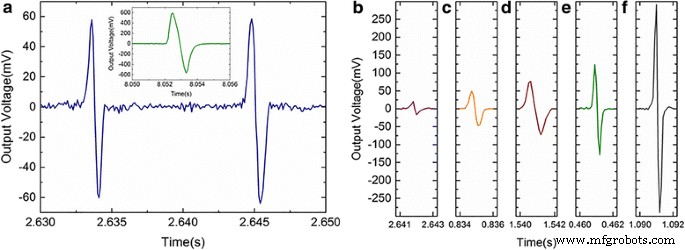
a の圧力からのホールドアンドリリース出力応答 75.1 kPa、 b 58.2 kPa、 c 67.8 kPa、 d 81.9 kPa、 e 98.1 kPa、および f 153.6 kPa;挿入図は、裸のPVDFフィルムから得られたホールドアンドリリース出力応答を示しています
次に、選択点への圧力の適用を検討します。アレイの1つの電極に圧力が加えられた場合、隣接するアレイ間で信号干渉が示されます。信号干渉のシミュレーションは、アレイ上のCOMSOLMultiphysicsを介して実施されました。各電極面積は1.4mm 2 。構造の形状を図5aに示します。電極Aに圧力を加えたときの追加のひずみを図5bに示します。これは、電極Aから離れるにつれてひずみが増加することを示しています。20〜80kPaの圧力レベルでの電位差の干渉を調べました。図5c。電位差と圧力は、傾きが0.028 mV / kPa、切片が5×10 -4 の線形関係を示します。 mV、非常に低レベルの干渉を意味します。 178 kPa未満の圧力では、5 mV未満の信号干渉が発生しますが、これは無視できます[16、17]。さらに、干渉のアレイ電極サイズへの依存性が調査された。図5dは、電極サイズが1.2、1.0、0.8 mm 2 の場合の結果を示しています。 。これは、干渉電位差と圧力(20〜60 kPaの範囲)の間の線形関係が、最小の電極でも観察できることを示しています。インターフェース電圧のフィッティングスロープは、3つの構造でそれぞれ0.01748、0.01181、0.00574 mV / kPaであり、電極サイズが小さいほど干渉電位が低下することが観察されています。
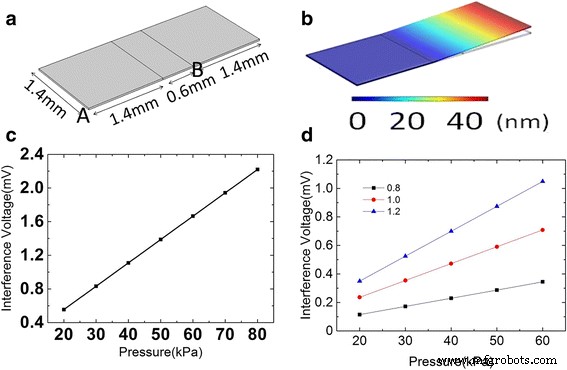
a 理論シミュレーションに使用される物理的寸法。 b 変位と c ライナーカーブ-干渉電圧と加えられた圧力の間の1.4mmのアレイサイズでのフィッティング。 d それぞれ0.8、1.0、1.2mmのアレイサイズを使用して得られた結果
簡単な実用的なアプリケーションでは、センサーを使用して、人間の手の指の圧力状態と分布を測定しました。ご存知のように、複雑な指の動きは、指圧、揉み、摩擦、摩擦などの基本的なスキルで構成されています[19]。私たちの実験では、指圧の状態と指の分布をテストするために、指圧、練り、摩擦を含む3つの最も一般的に使用される動きが選択されました。図6は、それぞれ指の3つの動きの間のセンサーによって特徴付けられる親指の指の圧力分布のスナップを示しています。図6aでは、指圧動作中に76 kPaの圧力が親指の指の中心に集中していることがはっきりとわかります。これは、それぞれ図6b、cで見られる練りと摩擦とはまったく異なります。図6bは、図6bに示すように、揉み動作中は親指の指の前部からの圧力が指の他の部分よりも高いのに対し、こすり動作中は親指の指の圧力がかなり均一(約68 kPa)であることを示しています。 6c。指で観察された圧力分布は、臨床観察での以前の報告と幾分似ています[17、20]。私たちの測定によると、柔軟な強誘電性PVDFフィルムに基づくひずみセンサーは、複雑な指の動きを特徴づけるのに敏感であることが証明されています。提案されたセンサーを使用することで、人間の指のスキルをより正確に探求することが期待されており、将来的には人間の指に代わるロボットの開発にも役立つでしょう。
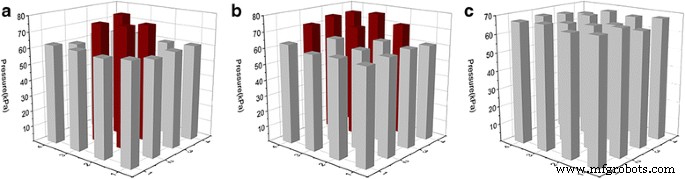
提案されたセンサーによって特徴付けられる親指の指の動きの圧力状態と分布: a 指圧、 b 練り、そして c こすり
結論として、圧電PVDF薄膜に基づく16個のコンデンサユニットを備えた4×4センサーアレイが製造され、PDMSでパッケージ化されました。センサーアレイは、柔軟で高感度の特性を示します。センサーのホールドアンドリリース出力応答は、さまざまな周波数でインパルス圧力を加えることによって得られました。これは、60〜150 kPaの範囲の圧力を加えると、センサーアレイが2 ms以内に20〜300mVの電圧信号を生成できることを示しています。提案されたセンサーを使用することにより、人間の手の指の動き中の指の明らかに異なる圧力分布が観察されました。これにより、人間の指のスキルをより正確に調査することが期待されます。
略語
- PFM:
-
ピエゾレスポンスフォース顕微鏡
- PVDF:
-
ポリ(フッ化ビニリデン)
ナノマテリアル