


静電容量式タッチセンシングを備えた3Dプリント義手
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
このプロジェクトでは、既存の3Dプリントされた義手に実装できるアイデアを思いつきました。既存の電動義足では、静電容量式タッチセンシングテクノロジーの使用を見つけることができませんでした 指の操作用 。このプロジェクトは、2つの非常にクールなものを組み合わせたものです。Arduinoと静電容量式タッチセンシングによる作動と e-NABLEフェニックスハンドのリミックス デザイン。
基本的に、フェニックスの手は体で動く手です。このプロジェクトで私が行ったことは、必要な部品設計を選択することで、電動義足に変換したことです。
静電容量式タッチセンシングの利点は、タッチによって指を簡単に操作できることです。現在、このモデルは個々の指を制御することはできず、体重負荷能力と把持能力のさらなる開発が必要です。
パーツを集める: <図>
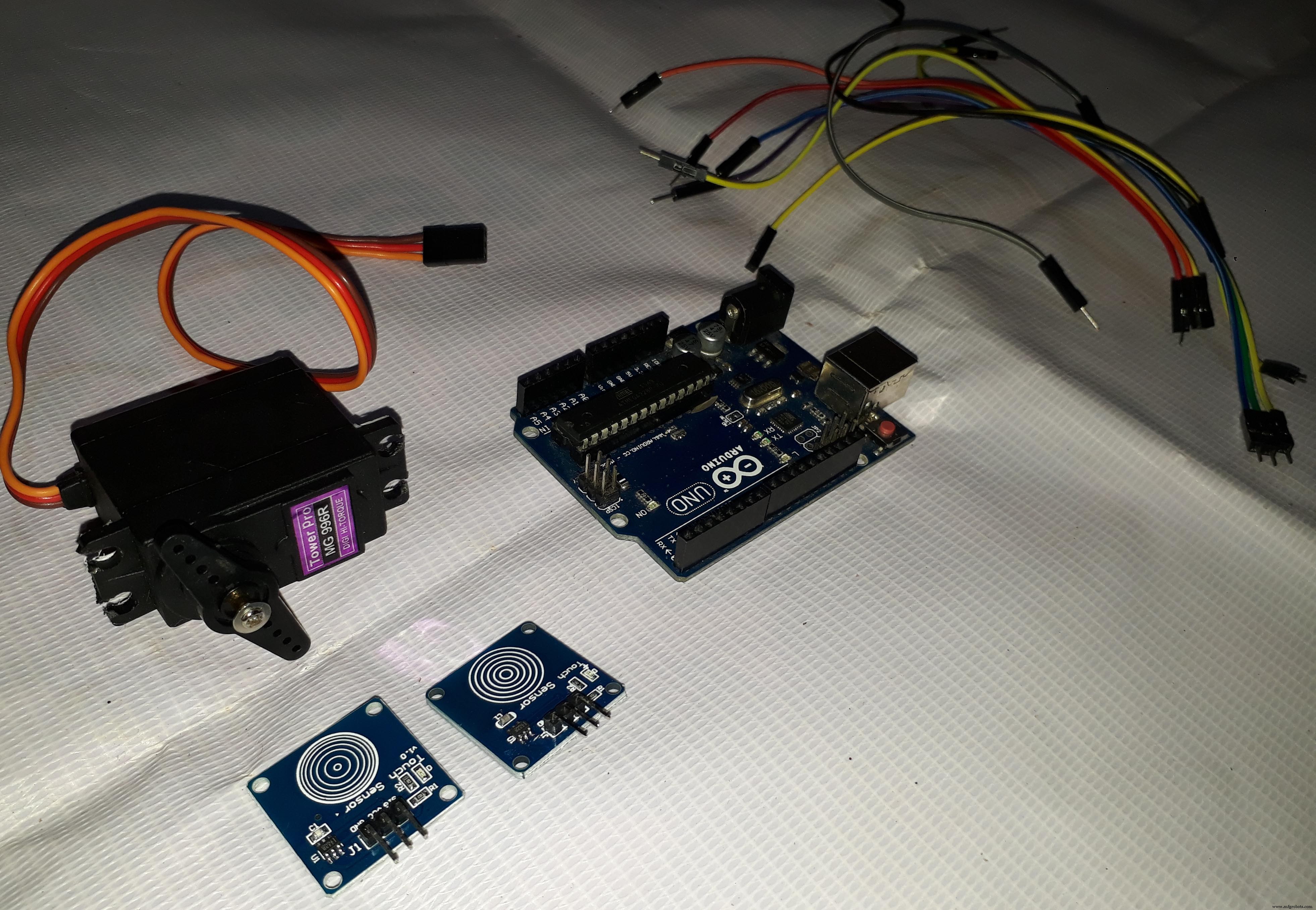
- Arduino Uno
- TTP223タッチセンサー-2
- MG996Rサーボモーター
フェニックスハンドのアセンブリ:
フェニックスの手のアセンブリの詳細は、次の手順で説明されています...
釣り糸としてフレクサーを使用しました および輪ゴムとしての伸筋
ツール:
- 3Dプリンター
- グルーガン
手の印刷:
このプロジェクトでは、以前に設計された e-NABLE を使用します フェニックスの手。
<図>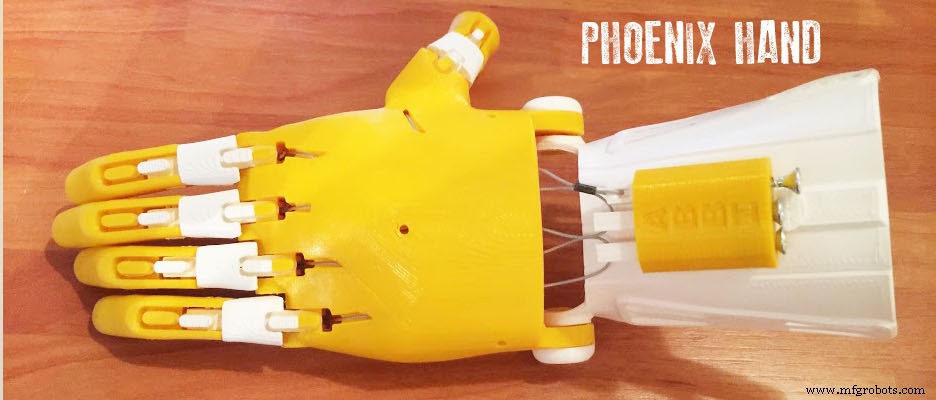
要件に従って、次の部分のみを印刷しました
指
- finger_phalanx.stl-4個
- fingertip_long.stl-2個
- fingertip_short.stl-2個
- thumb_phalanx.stl-1個
- thumbtip.stl-1個
手のひら
- palm_right_new_supports.stl-1個
スナップピン
- fingertip_pin.stl-4個
- knuckle_pin_long.stl-1個
- knuckle_pin_short.stl-2個
- thumb_knuckle_pin.stl-1個
- thumbtip_pin.stl-1個
これを作成する方法についてはすでに詳細な手順があるため、詳細には触れません
印刷にはFlsun3Dプリンターを使用しました。合計で、印刷に10〜12時間かかりました
(注:これらのパーツは右手用です)
手の組み立て:
フェニックスハンドのビルドプロセスはすでに利用可能であるため、あまり詳しくは説明しません。疑問がある場合は、コメントを残してください。
私は釣り糸として屈筋を使用し、輪ゴムとして伸筋を使用しました。
** スムーズにフィットさせるには、ある程度のスムージングが必要になる場合があります
電子部品:
作動は2つのタッチセンサー(TTP223)によって制御されます。タッチセンサーからの入力は、サーボモーターを介して指を開閉します。
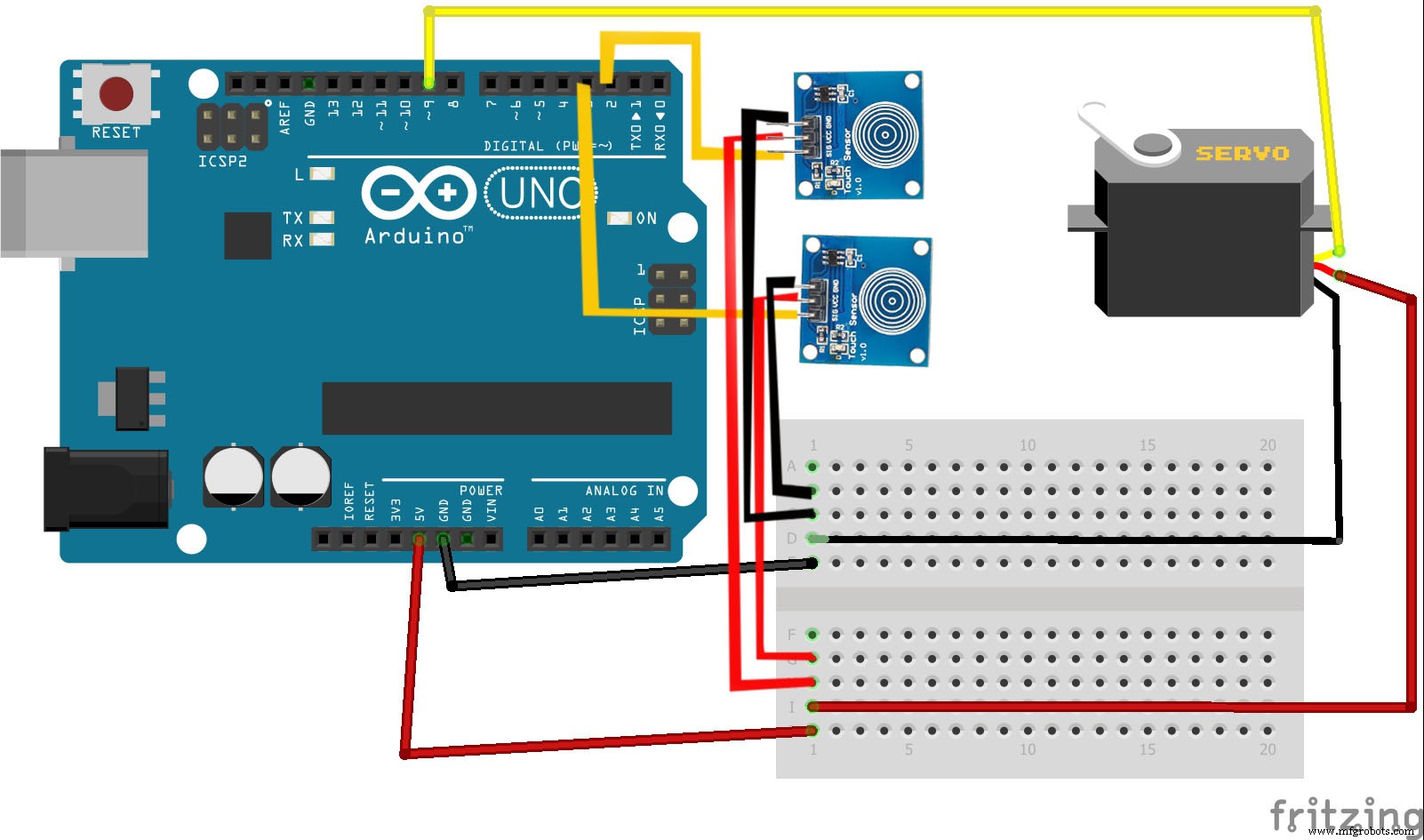
回路図とArduinoコード:
<図>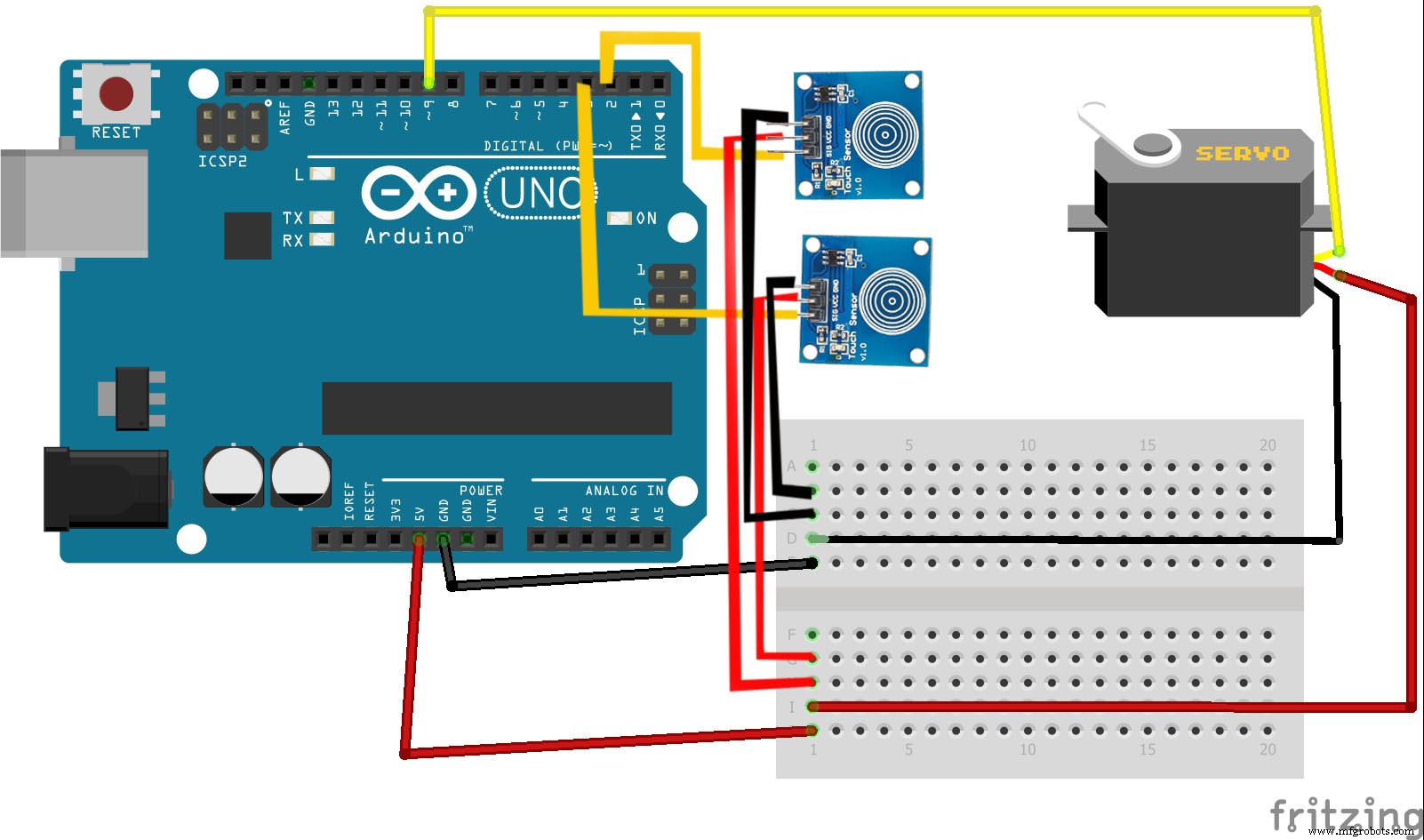
ハッピー 作成中!
さらに詳しい情報が必要な場合は、お読みいただきありがとうございます。コメントでお気軽にお問い合わせください。最善を尽くします。
コード:
#include Servo myservo; #define CTS1Pin 2 //容量性タッチセンサーのピン1#define CTS2Pin 3 //容量性タッチセンサーのピン2intpos; void setup(){myservo.attach(9); //ピン9のサーボをサーボオブジェクトに接続します} void loop(){int CTSValue1 =digitalRead(CTS1Pin); int CTSValue2 =digitalRead(CTS2Pin); if(CTSValue1 ==HIGH){for(pos =0; pos <=180; pos + =1)myservo.write(pos); delay(15); } if(CTSValue2 ==HIGH){for(pos =180; pos> =0; pos- =1)myservo.write(pos); delay(15); }} コード
- Arduinoスケッチ
Arduino Sketch Arduino
#includeServo myservo; #define CTS1Pin 2 //容量性タッチセンサーのピン1#define CTS2Pin 3 //容量性タッチセンサーのピン2intpos; void setup(){myservo.attach(9); //ピン9のサーボをサーボオブジェクトに接続します} void loop(){int CTSValue1 =digitalRead(CTS1Pin); int CTSValue2 =digitalRead(CTS2Pin); if(CTSValue1 ==HIGH){for(pos =0; pos <=180; pos + =1)myservo.write(pos); delay(15); } if(CTSValue2 ==HIGH){for(pos =180; pos> =0; pos- =1)myservo.write(pos); delay(15); }}
回路図
製造プロセス