


ArduinoとMPU6050によるサーボモーターの制御
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
コンポーネント
- Arduino UNO
- MPU6050
- MG996Rサーボモーター
- ジャンパー線
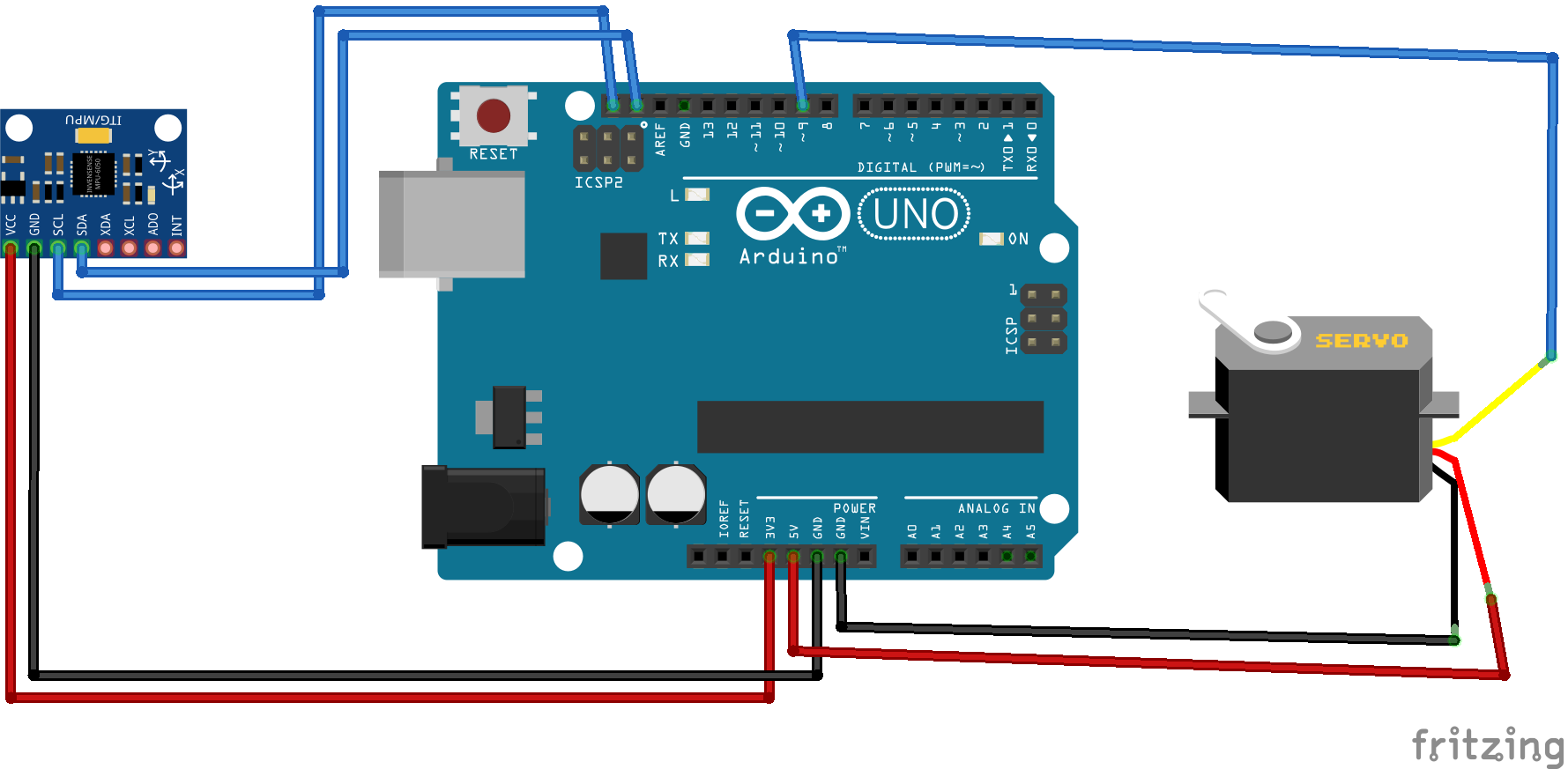
接続
接続の添付図を確認してください
注:MPU6050のSDAピンとSCLピンをArduinoのA4ピンとA5ピンにそれぞれ接続することもできます。
プログラミング
添付のライブラリをarduinoIDEに含めてから、コードをArduinoボードにアップロードします。
注
ビデオをチェックして完全に理解し、チャンネルを購読して詳細を確認してください。
ありがとう。
コード
- MPU6050ライブラリ
- プロジェクトのコード
MPU6050ライブラリ C / C ++
プレビューなし(ダウンロードのみ)。
プロジェクトのコード C / C ++
// [email protected] // https://www.youtube.com/watch?v =Cvtr3LKdqvk#include// GYROのライブラリ#include #include サーボmyservo; //サーボオブジェクトを作成してサーボを制御しますX =0; int Y =0; GY6050 gyro(0x68); // GYROデータを保存するにはvoidsetup(){Wire.begin(); // GYROを初期化するgyro.initialisation(); delay(100); myservo.attach(9);} void loop(){X =map(gyro.refresh( 'A'、 'X')、-90、90、0、180); //サーボモーターの角度制限に従ってジャイロデータをマッピングY =map(gyro.refresh( 'A'、 'Y')、-90、90、0、180); myservo.write(Y); // Y軸の移動により、サーボ遅延が制御されます(15);}
回路図
製造プロセス