


人間フォローボット
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
やあガイズ...
このパンデミックでは、誰もが家にいて安全を保っていると信じています。
Human FollowingBotという名前の新しいプロジェクトを作成しました。
ビデオ全体を見て、このプロジェクトを自宅で作成してください。
2つのIRセンサーと超音波センサーを使用しました。人間または物体を追跡するために使用されるIRセンサーと、ロボットを後退させるために使用される超音波センサー。
このプロジェクトが気に入ったら、それを尊重してください。
提案をお願いします。改善できるように、またはYouTubeチャンネルにフィードバックしたいフィードバックがあれば教えてください。
リンクは次のとおりです:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
また、「次のプロジェクトで作ったもの」についての提案もあります。
このプロジェクトを作成する手順:
1. Arduino、ホイール付きDcギア付きモーター、2つのIRセンサー、超音波センサー、サーボモーター、段ボール、l293dモータードライバーシールド、バッテリー9 v、スイッチ、ジャンパー線などのコンポーネントを収集します。
2.段ボールを取り、車輪付きの4つのモーターすべてを置いて車を作ります。
3.車にIRセンサーを配置します。
4.サーボモーターを車に貼り付けます。
5.超音波センサーをボックスに入れ、ハンドルを追加してからサーボモーターに接続します。
6.arduinoとl293dモーターシールドを車に接続します。
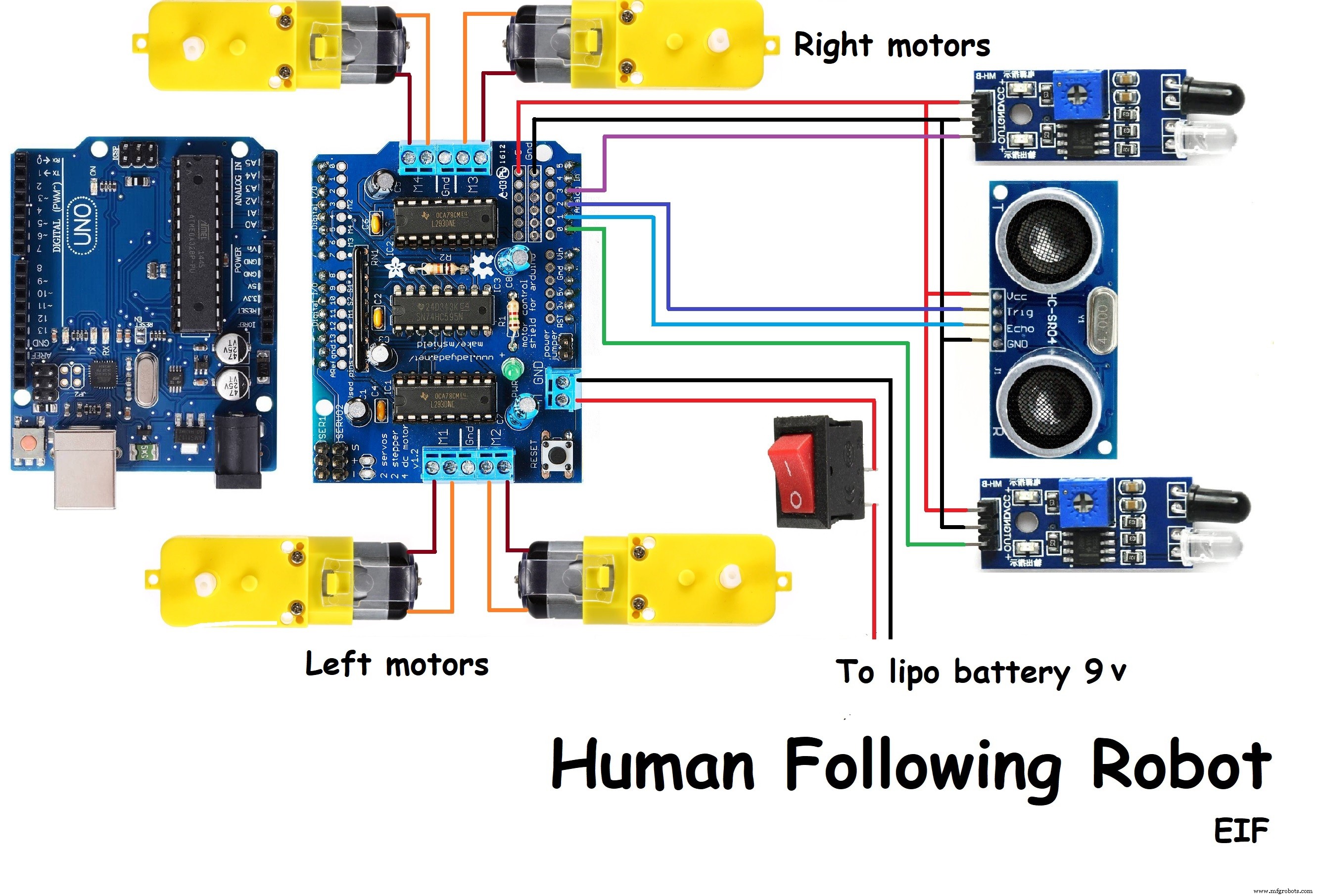
7.回路図に示すように接続します。
8.コードをアップロードし、バッテリー付きスイッチをl293dモータードライバーシールドに接続します。
IRセンサーの感度を調整します。
プロジェクトの準備ができました... !!!
私のYouTubeチャンネルに一度アクセスして、もっと面白いプロジェクトを見てください。
「エレクトロニクスは楽しい」
私のチャンネルが気に入ったら、購読してください。
リンク:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
コード
- コード
コード Arduino
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0#define echopin A1 // echo pin#define trigpin A2 //トリガーピン#define RIGHT A3AF_DCMotor Motor1(1、MOTOR12_1KHZ); AF_DCMotor Motor2(2、MOTOR12_1KHZ); AF_DCMotor Motor3(3、MOTOR34_1KHZ); AF_DCMotor Motor4(4、MOTOR34_1KHZ);サーボmyservo; int pos =0; long time; void setup(){Serial.begin(9600); myservo.attach(10); for(pos =90; pos <=180; pos + =1){myservo.write(pos); delay(15);} for(pos =180; pos> =0; pos- =1){myservo.write(pos); delay(15);} for(pos =0; pos <=90; pos + =1){myservo.write(pos); delay(15);} pinMode(RIGHT、INPUT); pinMode(LEFT、INPUT); pinMode(trigpin、OUTPUT); pinMode(echopin、INPUT);} void loop() {unsigned int distance =read_cm(); int Right_Value =digitalRead(RIGHT); int Left_Value =digitalRead(LEFT); Serial.print( "R ="); Serial.print(Right_Value); Serial.print( "L =" ); Serial.print(Left_Value); Serial.print( "D ="); Serial.println(distance); if((Right_Value ==1)&&(distance> =10 &&distance <=30)&&(Left_Value ==1)){forword();} else if((Right_Value ==0)&&(Left_Value ==1) ){turnRight();} else if((Right_Value ==1)&&(Left_Value ==0)){turnLeft();} else if((Right_Value ==1)&&(Left_Value ==1)){stop( );} else if(distance> 5 &&distance <10){stop();} else if(distance <5){backword();} delay(50);} long read_cm(){digitalWrite(trigpin、LOW); delayMicroseconds(2); digitalWrite(trigpin、HIGH); delayMicroseconds(10);時間=pulseIn(echopin、HIGH); return time / 29/2;} void forword(){//転送をオンにするMotor1.setSpeed(120); Motor1.run(FORWARD); Motor2.setSpeed(120); Motor2.run(FORWARD); Motor3.setSpeed (120); Motor3.run(FORWARD); Motor4.setSpeed(120); Motor4.run(FORWARD);} void backword(){//逆Motor1.setSpeed(120); Motor1.run(BACKWARD); Motor2.setSpeed(120); Motor2.run(BACKWARD); Motor3.setSpeed(120); Motor3.run(BACKWARD); Motor4.setSpeed(120); Motor4.run(BACKWARD); } void turnRight(){//他のrightMotor1.setSpeed(200); Motor1.run(FORWARD); Motor2.setSpeed(200); Motor2.run(FORWARD); Motor3.setSpeed(100); Motor3.run(BACKWARD ); Motor4.setSpeed(100); Motor4.run(BACKWARD);} void turnLeft(){//左に移動をオンにしますMotor1.setSpeed(100); Motor1.run(BACKWARD); Motor2.setSpeed(100); Motor2 .run(BACKWARD); Motor3.setSpeed(200); Motor3.run(FORWARD); Motor4.setSpeed(200); Motor4.run(FORWARD);} void stop(){// stoppedMotor1.setSpeed(0); Motor1.run(RELEASE); Motor2.setSpeed(0); Motor2.run(RELEASE); Motor3.setSpeed(0); Motor3.run(RELEASE); Motor4.setSpeed(0); Motor4.run(RELEASE); }
回路図
製造プロセス