


IMUセンサーの3Dモーションの視覚化
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
ソフトウェアの部分に飛び込む前に、ハードウェアキットを組み立てましょう。
MPU-6050センサーとは MPU-6050デバイスは、 3軸ジャイロスコープを組み合わせたものです および 3軸加速度計 オンボードのデジタルモーションプロセッサ(DMP)と一緒に同じシリコンダイ上に 、複雑な6軸 MotionFusion を処理します アルゴリズム。これで、6DOF-6自由度の意味を解読できるようになります。
接続回路とハードウェアのセットアップの詳細については、以前のブログを参照してください。
それでは、このモーションセンサーの3D視覚化を容易にする処理ソフトウェアについて見ていきましょう。
必要なソフトウェア:
- ProcessingIDE
2つの別々のIDEを含むArduinoIDEをすでにインストールしていることを考えると、少し混乱するかもしれません。まあ、慌てる必要はありません。以下の手順に従ってください。疑問がすべて解消されます!
処理は、いくつかの特殊な機能を除いて、ArduinoIDEと非常によく似ています。したがって、ProcessingIDEに影響/類似性が見られます。
図1と図2は、私の発言を明確にします。
<図> <図>
<図> 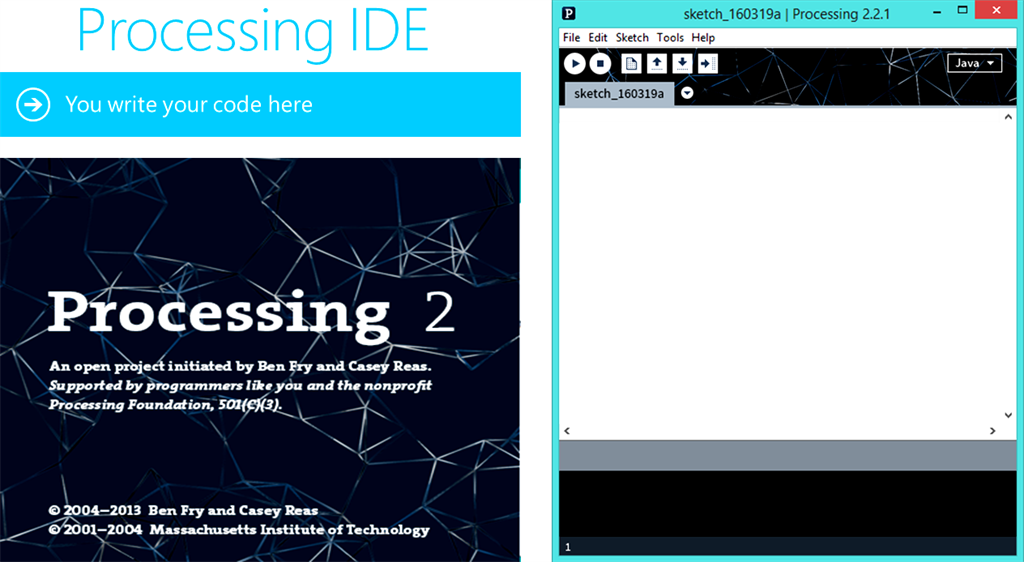
したがって、これらのIDEの両方に見事な視覚的類似性があることがわかります。 Processing IDEをインストールしたので、処理のために「Toxi」という名前の特別なライブラリをダウンロードする必要があります。 「Toxi」ファイルを見つけることは、ワールドワイドウェブ上で非常に忙しいことがあります。そこで、GitHubにアップロードすることで、簡単にできるようにしました。このリンクをクリックして、「toxiclibs-complete-0020」という名前のファイルをダウンロードします。 次に、フォルダを抽出します。 "toxiclibs-complete-0020" をコピーします フォルダを作成して、「ライブラリ」の下に貼り付けます Processing.Cantのフォルダは「ライブラリフォルダ」を見つけます 「?それなら、1つ作ってください!ええ。「ライブラリ」が見つからない場合 "フォルダ、フォルダを作成し、" ライブラリという名前を付けます "。次に、" toxiclibs-complete-0020 "を貼り付けます これらの手順を正しく実行した後、ProcessingIDEを実行します。コードを作成する時間です。3Dビジュアライゼーションを視覚化するには、最初にMPU-6050のArduinoコードをアップロードする必要があります(MPU6050_DMP6.rarフォルダーから.inoファイルを抽出します)。そうしたら、以下のように特定の変更を加える必要があります。次のようなこのコードにコメントする必要があります。
#define OUTPUT_READABLE_YAWPITCHROLL // #define OUTPUT_READABLE_YAWPITCHROLL
同様に、次のようなコードのコメントを解除します。
//#define OUTPUT_TEAPOT #define OUTPUT_TEAPOT による
次に、MPU-6050の処理例を開きます。ツールバーに移動し、[ファイル]-> [開く]をクリックします。次に、Arduino用のMPU-6050ライブラリをインストールしたフォルダに移動します。処理例を簡単に見つけることができます:フローシーケンスに従ってください:MPU6050>例> MPU6050_DMP6>処理> MPUTeapot.ArduinoIDEの場合と同様に、この場合も同様に、そこに定義されているシリアルポートを確認します。ここで、コードを確認します。デフォルトでは、この行で linux / mac のコードが定義されていることがわかります。 ユーザーとして:
String portName ="/ dev / ttyUSB1";
文字列portNameをArduinoが接続されているポートに変更する必要があります。図3を参照してください。
<図>
ウィンドウの場合 ユーザーは、このコードを次のようにコメントします:
// String portName ="/ dev / ttyUSB1";
同様に、このコードのコメントを次のように解除します。
// String portName ="COM15"; by String portName ="COM15";
「 COM15 」を置き換えます 「arduinoが接続されているCOMポートを使用します(arduinoと[ツール]-> [シリアルポート]に移動して確認します)。これで、最終的にセットアップが完了しました。これで、ほんの数分で完了します。Arduinoコード(MPU6050_DMP6)をアップロードします。 Arduinoを介して。注: プロセスの進行中はシリアルモニターを開かないでください(なぜですか?ArduinoIDEではなくProcessingIDEでコードを視覚化するため)
次に、「再生」のボタンを押して処理コード(MPUTeapot)を実行します シンボル。オブジェクトのような小さな平面が表示されます。MPU-6050の値が安定するまで約10〜12秒待ちます。その後、3DモデルがMPU-6050センサーに合わせて動くのがわかります。下のGIFを参照してください。理解を深めるには、YouTubeにアクセスしてください
<図>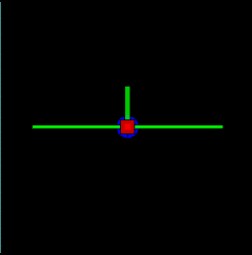
次のチュートリアルで、独自にカスタマイズしたフライトシミュレーター機器を設計します。
<図>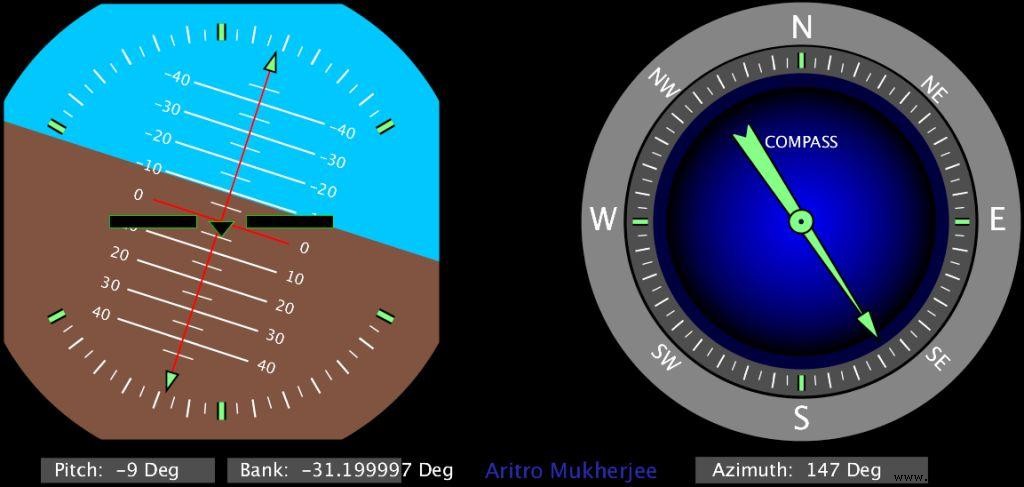
ハードウェア/ソフトウェアのセットアップに関して問題が発生した場合は、以下にコメントしてください。
コード
完全なプロジェクトコード
このフォルダーをダウンロードし、このチュートリアルで指定されている手順に従います。https://github.com/AritroMukherjee/MPU5060sensor/blob/master/MPU6050.zip 回路図
ArduinoでIMU(MPU-6050)センサーをセットアップするためのステップバイステップのチュートリアルについては、以前のブログ投稿に従ってください。リンク(https://www.hackster.io/Aritro/getting-started-with-imu-6-dof-motion-sensor-96e066) 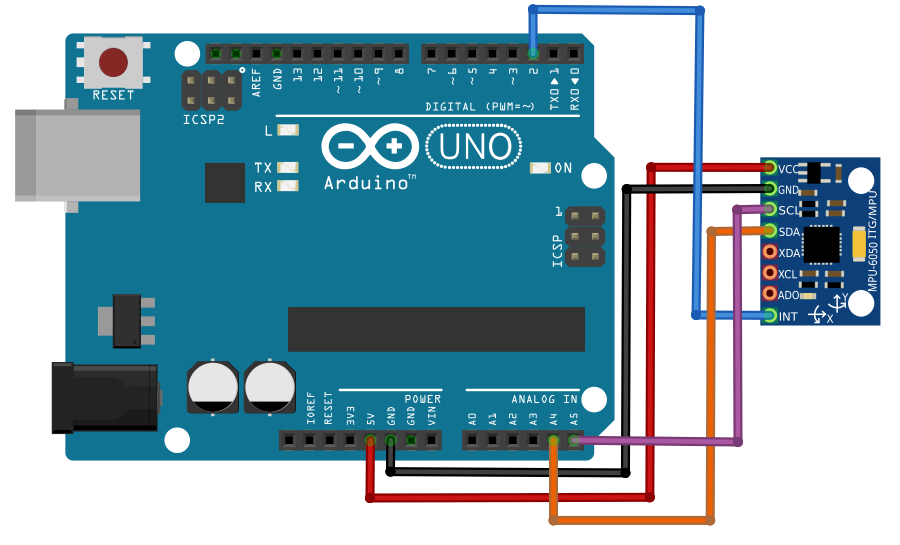
製造プロセス
- IMUセンサーの動作とその応用
- Logic-Xが新ブランドのCOTSセンサー処理製品を発売
- SmartThingsのモーションセンサーとしてのコンピュータービジョン
- Raspberry PiのHAでのモーションセンサー、アラーム、ビデオ録画
- ラズベリーパイ用DIY赤外線モーションセンサーシステム
- RaspberryPiを使用したモーションセンサー
- ラズベリーパイ温度センサー
- PIRモーションセンサーを備えたRaspberryPi GPIO:最高のチュートリアル
- HC-SR501PIRモーションセンサーとRaspberryPiのインターフェース
- 感情センサー/ EEG
- 電子皮膚センサーは人間の動きを解読します