


ボルト制御ロボットカー
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
アプリとオンラインサービス
>  |
| |||
 |
|
このプロジェクトについて
免責事項:
このプロジェクトの作成中に電子機器が損傷することはありませんでした。
第1幕:ある晴れた日...
私たちは朝から仕事をしていて、たくさんのドキュメントとコードテストが残っていて、必死に休憩が必要でしたが、フーズボールをプレイするとゾーンから追い出されるので理想的ではありませんでした。ですから、落ち着きを保つために、私たちは何ができるかを考え始めました。それは私たちをリラックスさせますが、それでも私たちはその「仕事の領域」にとどまります。その時、私たちのマネージャーが「ちょっとしたプロジェクトを作って、それをハックスターに載せてみませんか?」と提案しました。プラナフに電話してください。
そこで、小さなボーナス機能を備えたインターネット制御の-wait-for-it- RCロボットを作成することにしました(サスペンスが重要であるため、後で明らかにします)。
<図>
さて、私たちは元気になり、社内の金物屋に急いで行きました。
第2幕:ハードウェアの森
私たちは金物屋に到着します、それはあなたの目を貪欲に輝かせるキットとコンポーネントでいっぱいです、あなたの手はそれらに向かって引っ張られますそしてあなたはそれを知る前にあなたは8ビット電卓を作るために部品をはんだ付けするでしょう、しかし私たちは集中しましたそして、これらの気晴らしが私たちを強制することを許さず、私たちは必要なものをつかんだだけでした(あなたもそうすべきです)
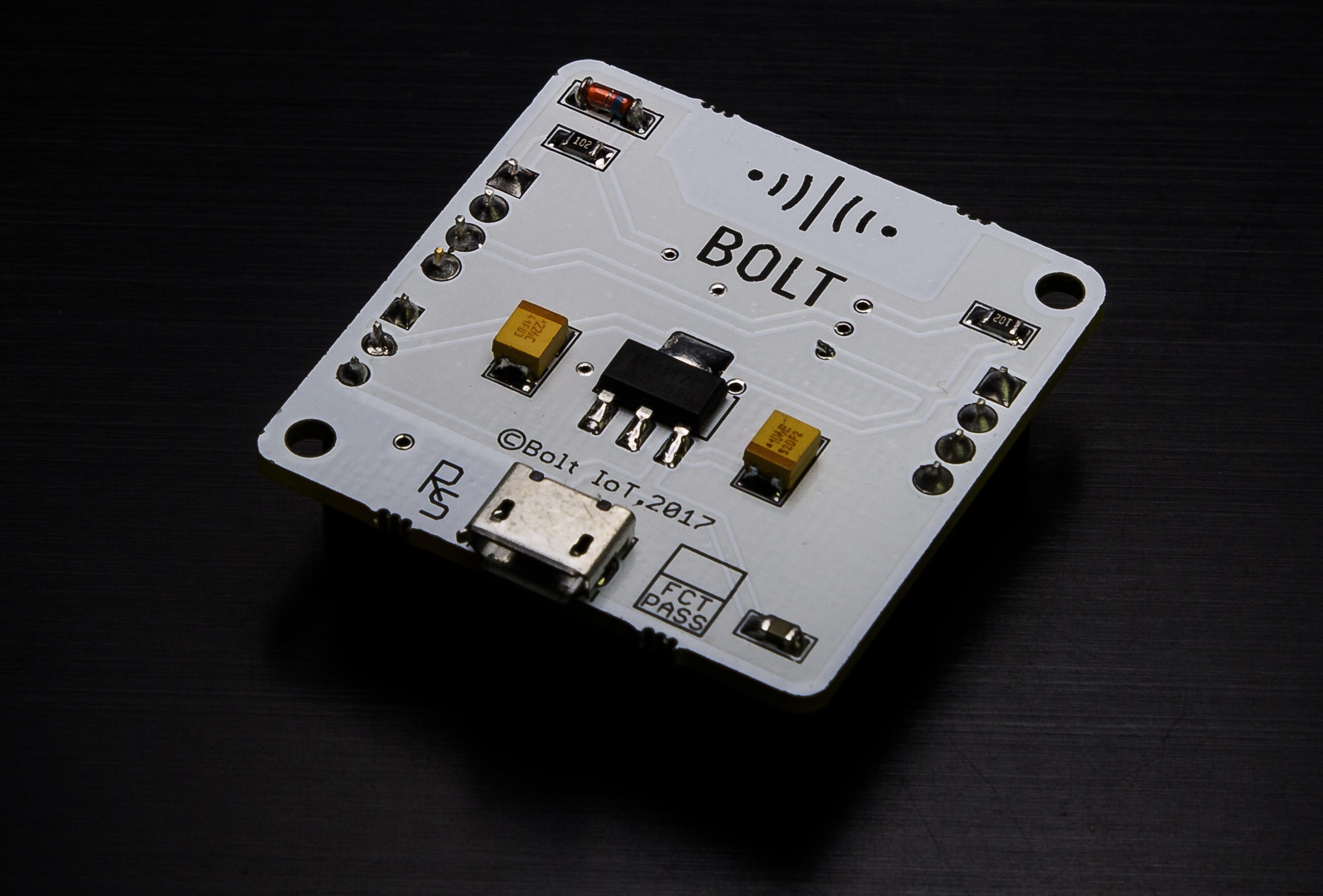
1.ボルトWifiモジュール
<図>
2.基本的なロボットキット
<図>
3. ArduinoUNOまたはBoltduino
<図> <図>
<図> 
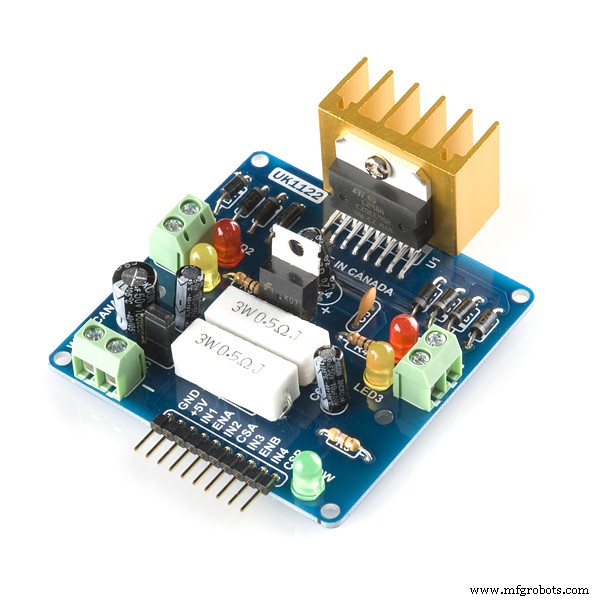
4.L298Nモータードライバーシールド
<図>
5.近接センサー
<図>
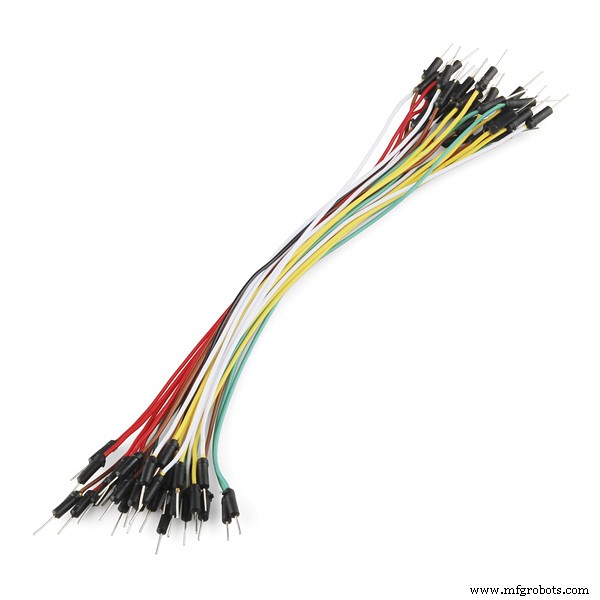
6.ジャンパー線
<図>
7.電源アダプター
<図>
第3幕:鍛造
必要なすべての部品を持って、ハードウェアの森から無事に戻ってきました。ハードウェアのハイロードであるデヴァシッシュが魔法を使い、この小さなロボットを組み立てる時が来ました。
<図>
これが彼のやり方です。
ハードウェアの組み立て
1.図のように、シャーシの前部中央部分にキャスターホイールを取り付けます。
2.ロボットカーのシャーシを組み立て、図のように提供されたホイールと一緒にナットとボルトを使用して2つのDCモーターを取り付けます。
注:シャーシに取り付ける前に、ワイヤーをモーターの端子にはんだ付けしてください。
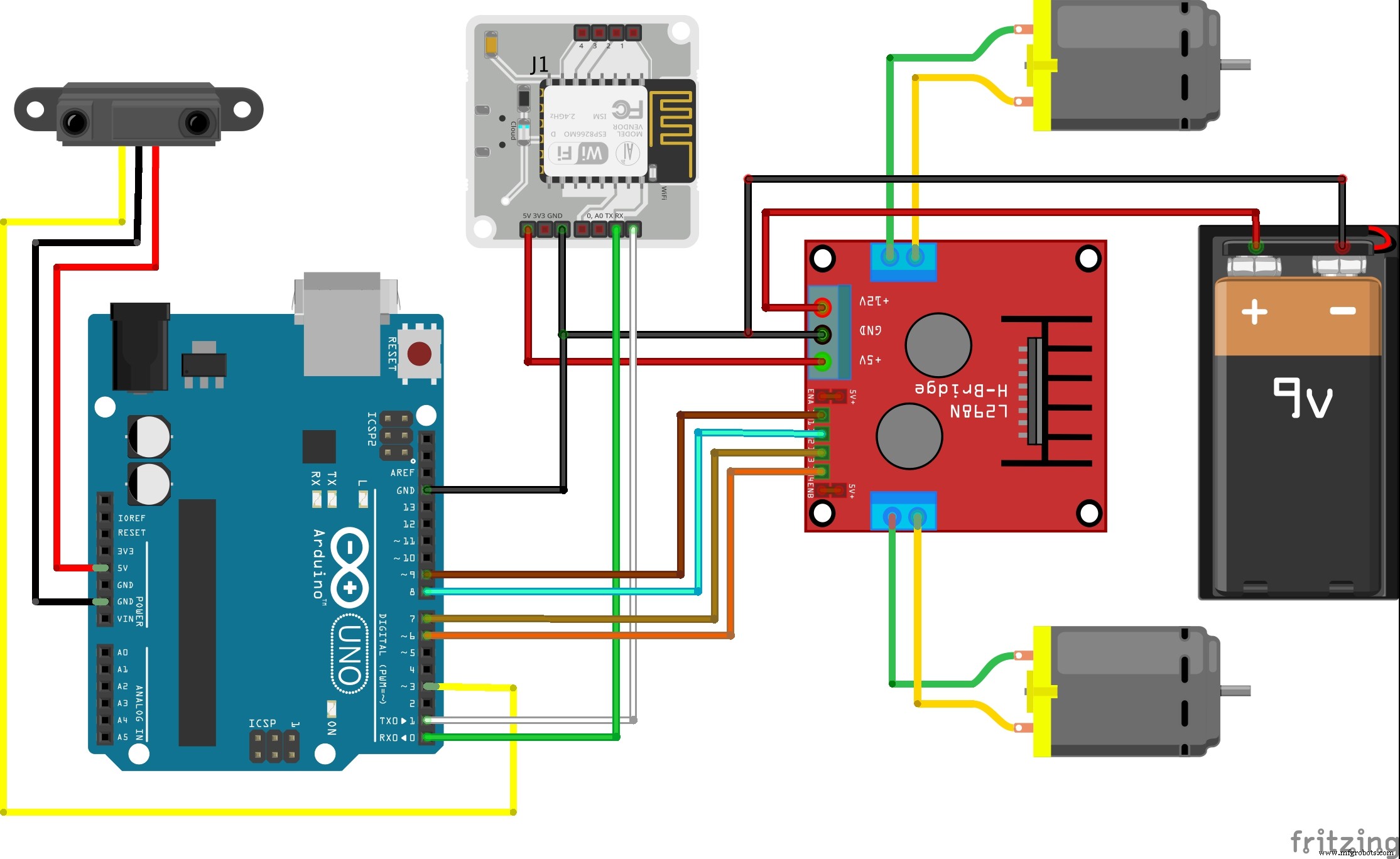
3.次に、以下に示すように、モーターの端子をL298Nモータードライバーモジュールに接続します。
注:モーターの両方の端子をドライバーモジュールの同じ側に接続します。
4.ドライバモジュールの5VピンとGNDピンをそれぞれArduinoの5VとGNDに接続します。
5.ボルトのピン5V、GND、Tx、およびRxをそれぞれArduinoのピン5V、GND、Rx、およびTxに接続します。 Boltduinoの場合、ボルトユニットを現在のスロットに取り付けます。
6. 4つの入力端子(IN1、IN2、IN3、IN4)をそれぞれピン6、7、8、および9に接続します。
7.近接センサーの5V、GND、およびOUTピンをそれぞれArduinoのピン5V、GND、および3に接続します。
<図> <図>
<図>  <図>
<図> 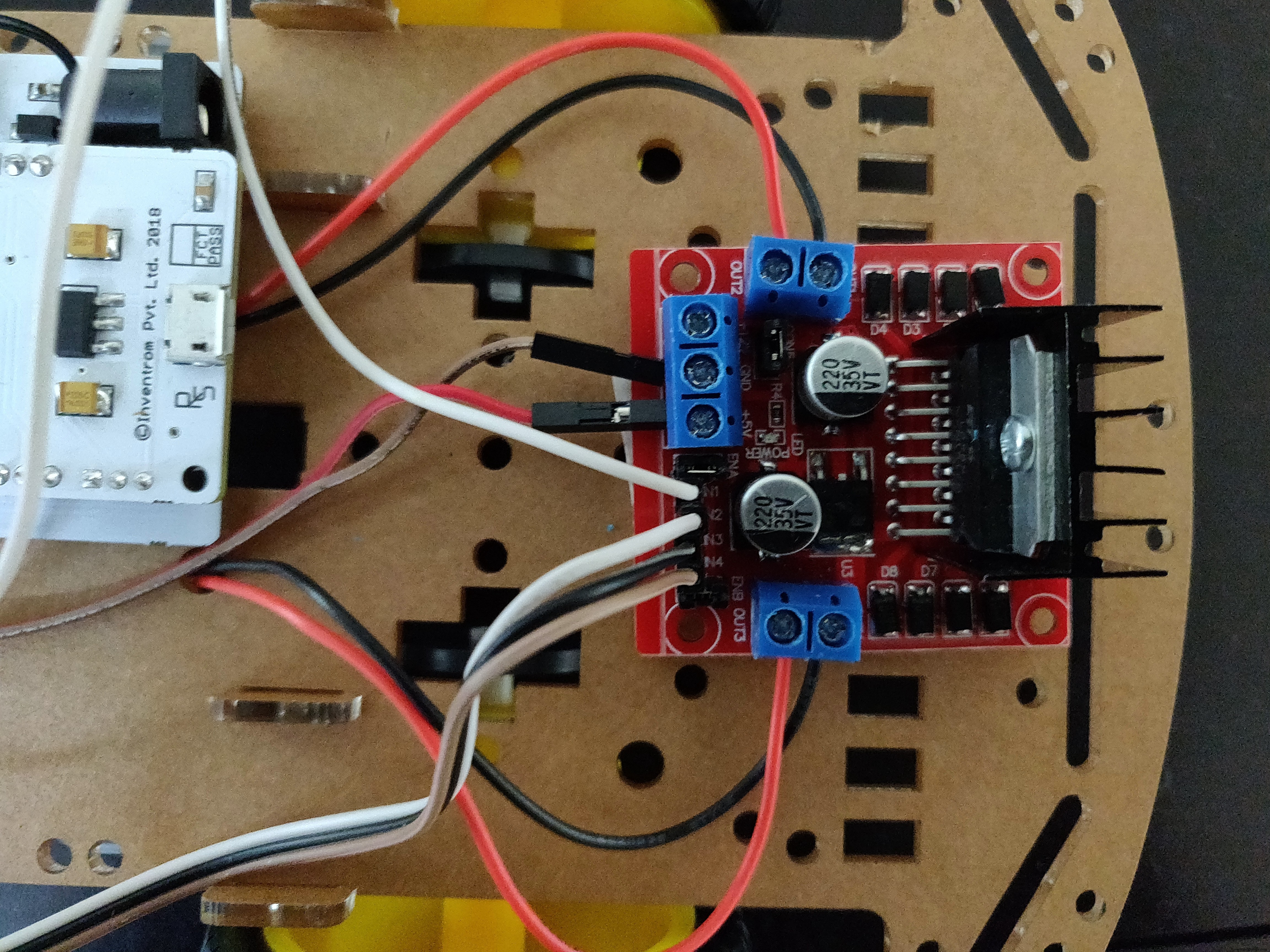 <図>
<図> 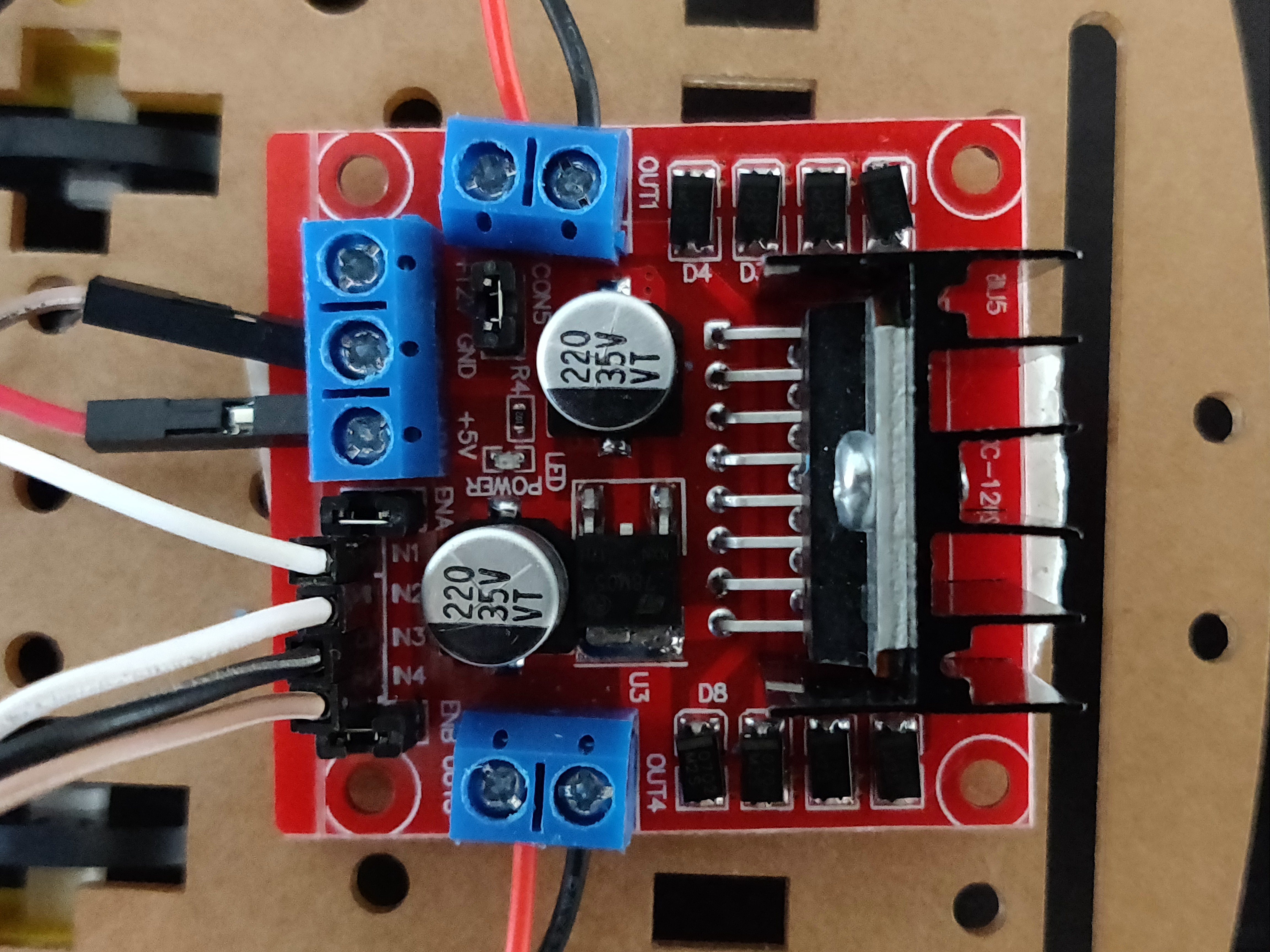 <図>
<図> 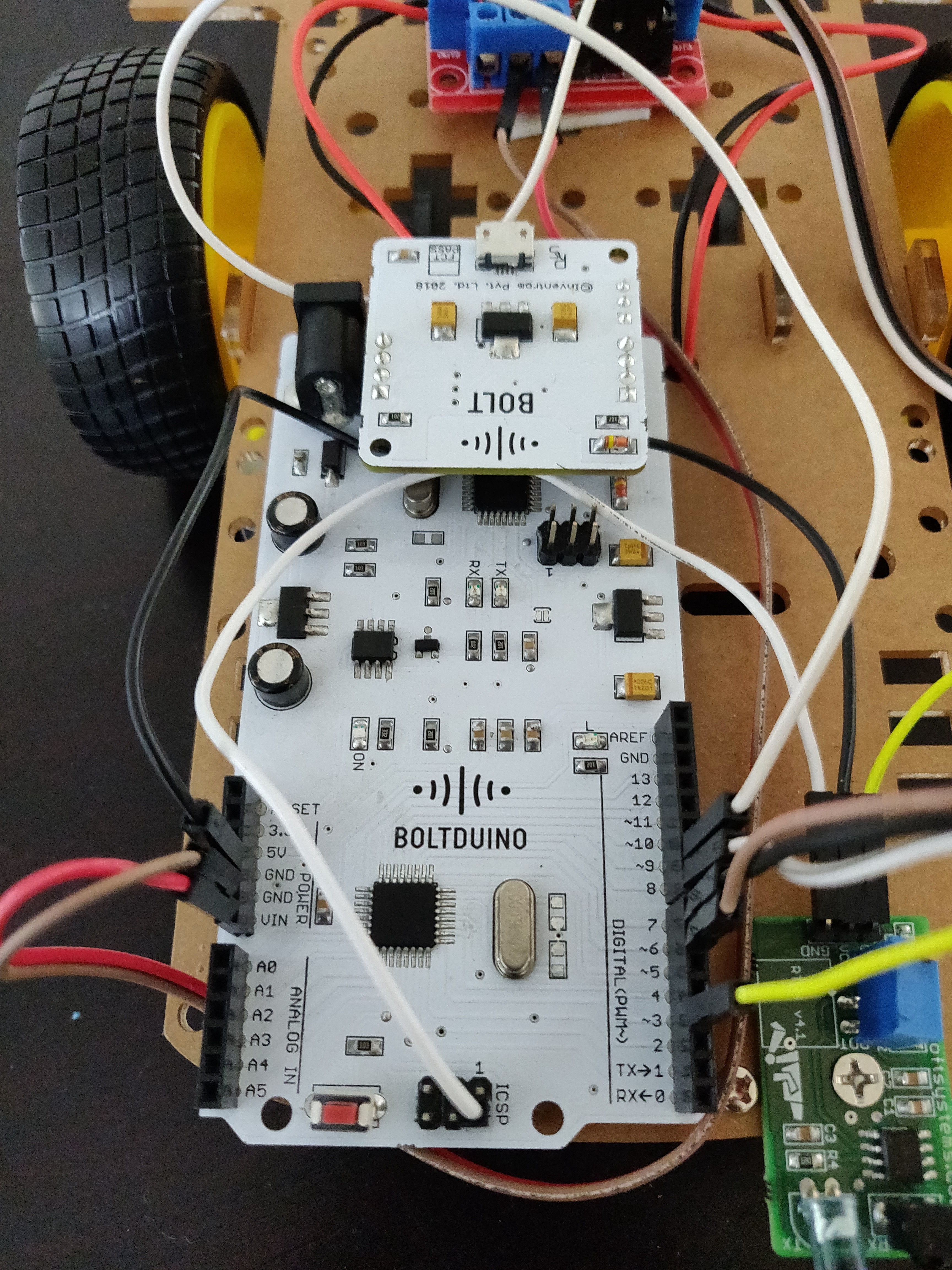 <図>
<図> 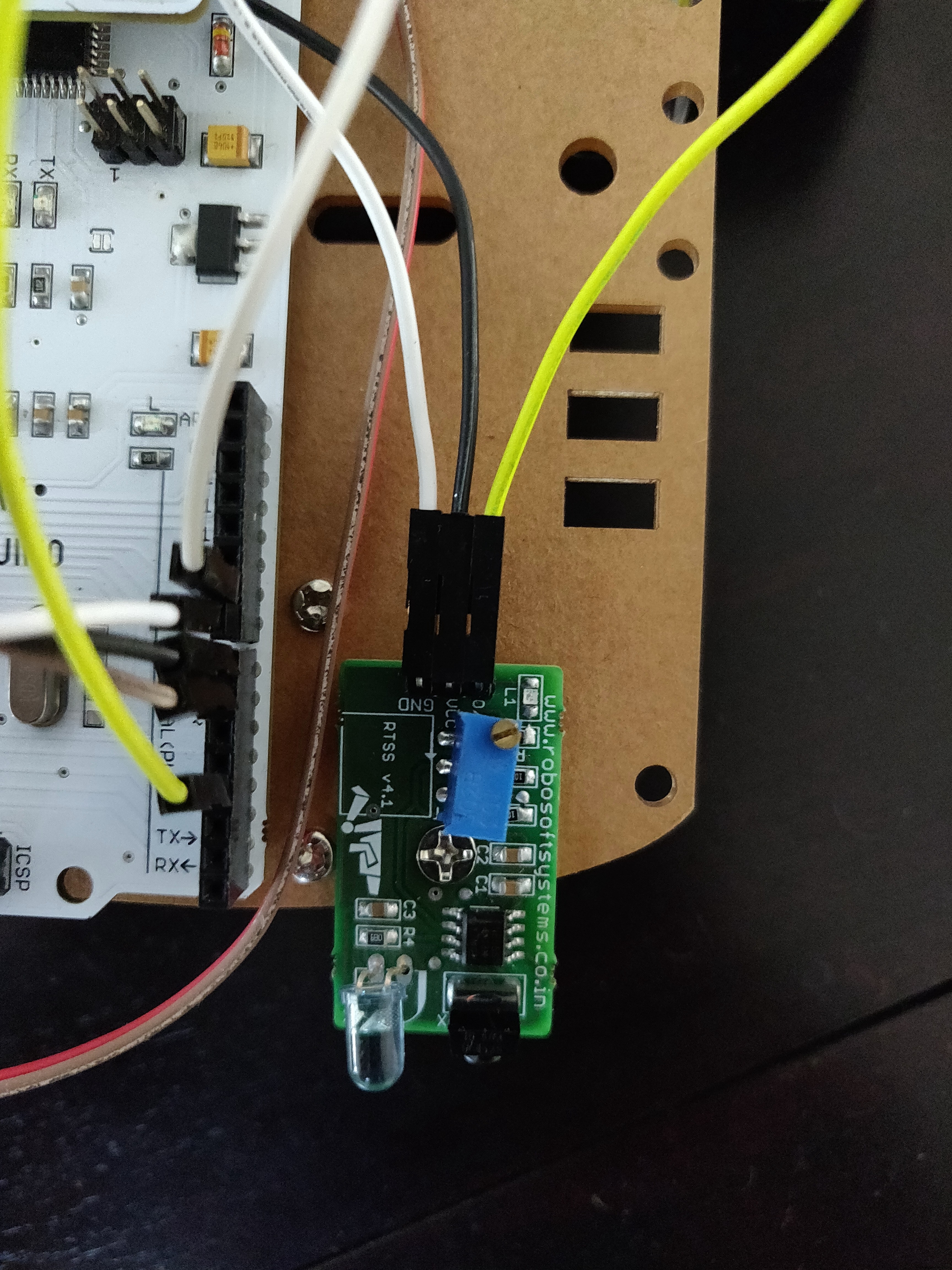 <図>
<図> 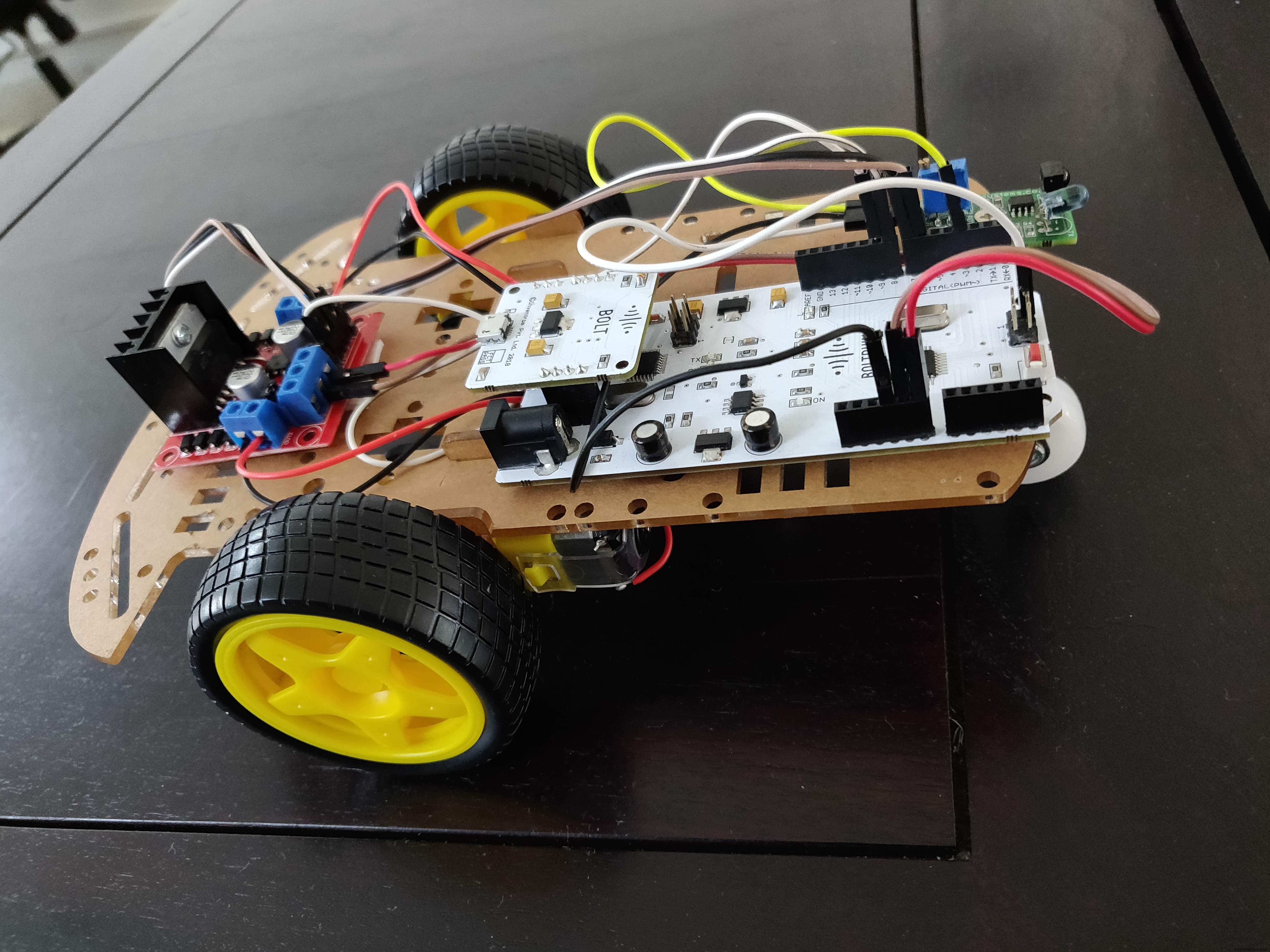
注:いずれの場合も さらに、以下に示す回路図を確認するのに役立ちます。
ボルトをクラウドに接続する
ハードウェアを組み立てたら、Boltユニットを登録してBoltCloudに接続します。ボルトの登録とクラウドへの接続について詳しく知る。
第4幕:そして接続性があった
今、ハードウェアのハイロードはコードの窯の暗殺者(すなわち私)を派遣しました。
<図>
彼は、このロボットを自分のコードで生き生きとさせ、クラウドに接続するという任務を負っていました。彼の足跡をたどって、ロボットも機能させましょう。
ステップ 1: 取得 コード。
このプロジェクトのGithubリポジトリからコードを取得します。 .zipファイルをダウンロードするか、システムに複製します。
ステップ 2: 作業中 あり コード。
コードには2つの部分があります:
- app という名前のフォルダ
- このフォルダ内には2つのファイルがあります。 controller.html ii。 controller.js。 それらについては後で話します。
- 次に、 Bolt_Robot_Car.ino という名前のファイルにArduinoのファームウェアがあります。 。これはArduinoにフラッシュ/アップロードされます。
ステップ 3: 設定 上 Arduino。
ハードウェアのセットアップとボルトのクラウドへの接続が完了したら、ファイル Bolt_Robot_Car.ino にあるファームウェアをアップロードします。 あなたのArduinoに。 Arduino IDEをセットアップし、コードをArduinoにアップロードする方法を知るには、このリンクをたどってください。
ステップ 4: コントローラー アプリ。
controller.html をダブルクリックします ファイルを作成すると、次のWebページが表示されます。
<図>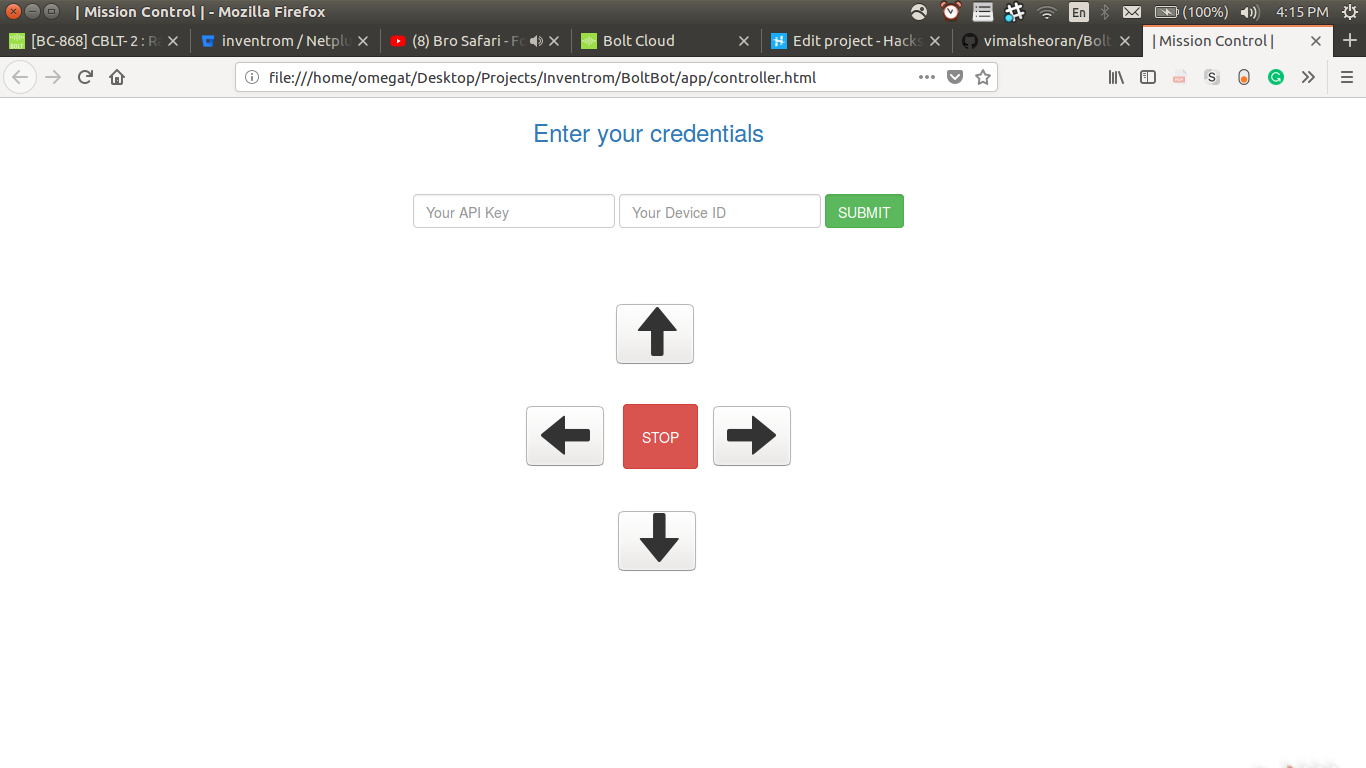
次に、 APIキーを入力します およびデバイスID それぞれのフィールドに入力し、送信を押します。 APIキーを取得できます およびデバイスID BoltCloudダッシュボードから。
この後、コントロールボタンを使用してロボットの動きを制御できます。ボタンを押すと、特定のJavaScript関数がトリガーされます(ファイル controller.js を確認してください) )コマンドをBolt Cloudに送信してから、BoltWiFiモジュールに送信します。これで、RCボットがそれを使って何をするかを実行できます。これを使用して複数のことを行うことができます。いくつかのセンサーを接続するか、自動にするか、または必要に応じて行うことができます。そして、あなたが混乱しても心配しないでください、私たちメーカーランドの原住民はいつでもあなたを助けるためにここにいます。
第5幕:イースターエッグ
「おまけ機能があるって言ってたけど、どこにあるの?」と思っている方もいらっしゃるかもしれません。高くて乾いたままにするつもりはないので心配しないでください。ただし、 ActThree:Forging の機能にすでに気付いている可能性があります。 まだご覧になっていない場合は、もう一度ご覧ください。しかし、そのような時間があるので、TL; DRは、ロボットが障害物や経路上の障害物に遭遇した場合に自動的に停止するため、壁にぶつかることはありません。これでこの話は終わりです。このビデオを見て、このプロジェクトのビデオチュートリアルを確認してください。
デモ:
コード
BoltBot
https://github.com/vimalsheoran/BoltBot 回路図
製造プロセス
- 車の主成分とその機能
- Bluetoothで制御されるRaspberryPi Robot
- RaspberryPiを使用したジェスチャー制御ロボット
- ANDROID SMARTPHONEから制御されるRASPBERRYPI WIFI ROBOT
- Windows 10 IoT Core:音声制御ロボット
- RaspberryPiを使用したWifi制御ロボット
- ROObockey:リモート制御の照準支援ストリートホッケーロボット
- ジョイスティック制御のRCカー
- 音声制御ロボット
- イーサネットを介して制御されるロボットアーム
- MobBob:Androidスマートフォンで制御されるDIY Arduino Robot