


ホライゾンとコンパス用のDIY飛行計器
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
今日は、MPU-6050モーションセンサーを使用して、独自にカスタマイズしたフライトシミュレーターを作成します!!!
MPU-6050センサーとは何ですか? MPU-6050デバイスは、 3軸ジャイロスコープを組み合わせたものです および 3軸加速度計 オンボードのデジタルモーションプロセッサ(DMP)と一緒に同じシリコンダイ上に 、複雑な6軸 MotionFusion を処理します アルゴリズム。これで、6DOF-6自由度の意味を解読できるようになります。
「これらのMotionTrackingデバイスは、スマートフォン、タブレット、ウェアラブルセンサーの低電力、低コスト、および高性能の要件に対応するように設計されています。」
必要なもの...
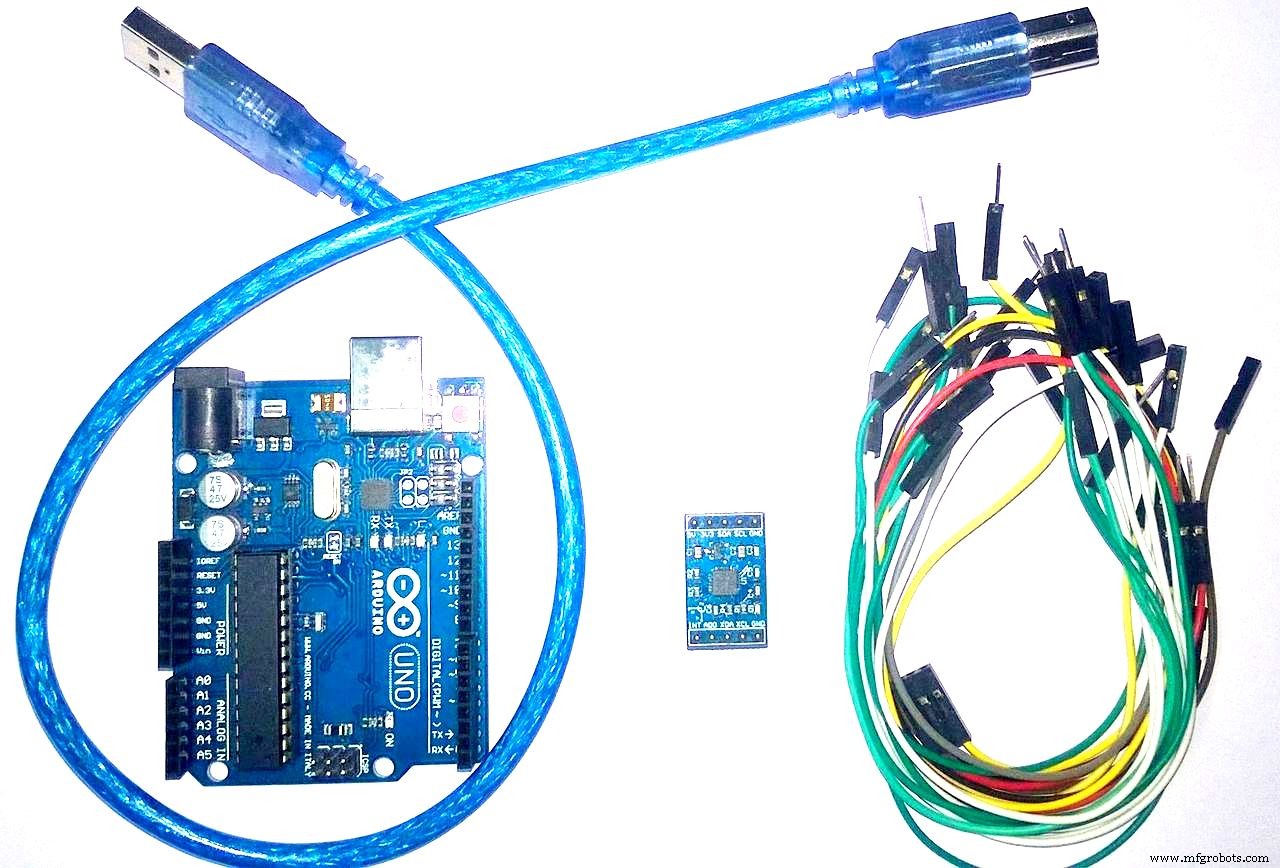
ハードウェアコンポーネント:
- 1)Arduino / Genuino UNO (Arduinoボードはすべて目的を果たします)
- 2) MPU-6050 6自由度のIMU(慣性計測ユニット)センサー
- 3)ジャンパー線
ソフトウェア:
- Arduino
- 処理
コーディングの部分に飛び込む前に、ハードウェアキットを組み立てましょう。
接続回路図とハードウェア設定の詳細については、以前のブログを参照してください。簡単なガイダンスとして、このプロジェクトの接続図も添付しました。
接続図に従ってコンポーネントをセットアップした後、このモーションセンサーの3D視覚化を容易にする処理ソフトウェアに行きましょう。
" IDEの処理 "
すでにArduinoIDEをインストールしていることを考えると、1つのプロジェクトに2つの別々のIDEを含めると、少し混乱するかもしれません。まあ、慌てる必要はありません。以下の手順に従ってください。疑問がすべて解消されます!
処理は、いくつかの特殊な機能を除いて、ArduinoIDEと非常によく似ています。したがって、ProcessingIDEに影響/類似性が見られます。
図2と図3は、私の発言を明確にします。
<図> <図>
<図> 
したがって、これらのIDEの両方に見事な視覚的類似性があることがわかります。
ここでは、ファイである3次元の度を読み取ります。 、シータ 、 Psi 処理IDEのシリアルモニターを使用したMPU6050で。
このチュートリアルの最後に添付されているArduinoコードをアップロードします。
コードのコンパイルに問題がある場合は、MPUとi2cライブラリがインストールされているかどうかを確認してください。http://playground.arduino.cc/Main/MPU-6050
にあります。これらの手順を実行した後、「処理中」のコードをアップロードします。コードはいくつかのテストと変更の後に添付されているため、コード内の何も変更する必要はありません。
デモンストレーション:
ご不明な点がございましたら、以下にコメントしてください。
コード
フライトシミュレーションコード
このリポジトリには、ArduinoIDEとProcessingIDEのコードがあります。 https://github.com/AritroMukherjee/FlightSimulatorCodes 回路図
それに応じて、IMUセンサーをArduinoに接続します。 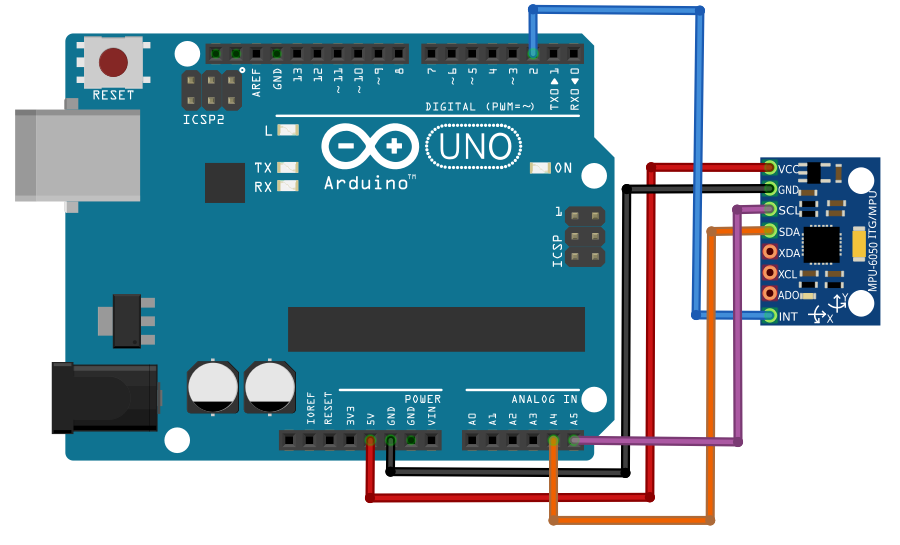
製造プロセス
- Arduinoセンサー–タイプとアプリケーション
- コンパスセンサー–動作とアプリケーション
- DIY:HomeBrewの温度監視と規制
- ラズベリーパイ用DIY赤外線モーションセンサーシステム
- フライトシミュレータ用のArduinoを備えたLCDパネル
- LEDとピエゾスピーカーを備えたDHT11センサー
- Arduinoとスマートフォンを使用したDIY電圧計
- Arduinoを使用したDIY赤外線ハートビートセンサー
- IOT-ESP8266、Arduino、超音波センサーを使用したスマートジャー
- ArduinoとNokia5110ディスプレイを備えたDIY電圧計
- ArduinoとProcessingIDEを使用してコンパスを作成する方法