


ArduinoAntヘキサポッドロボット
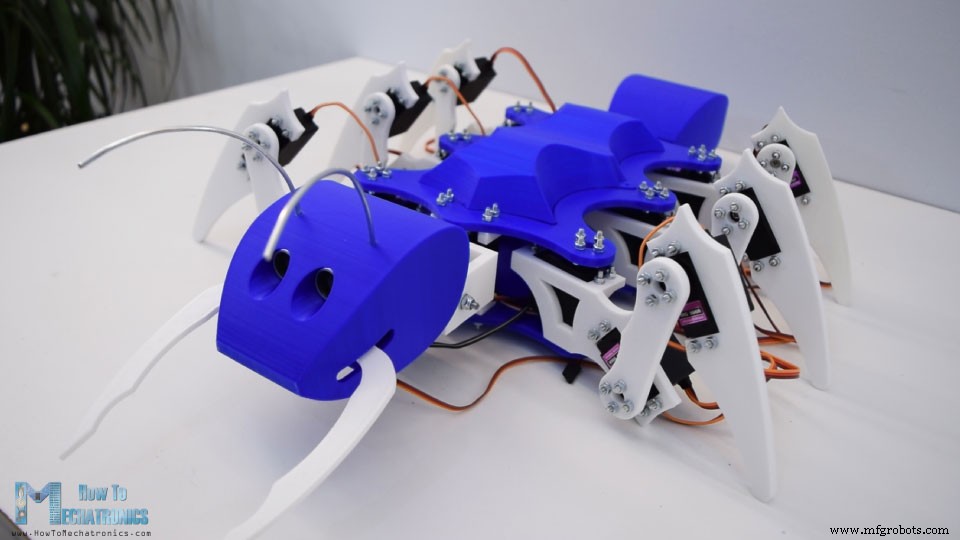
このチュートリアルでは、Arduinoヘキサポッドをどのように構築したかを紹介します。名前が示すように、ヘキサポッドには6本の脚がありますが、それに加えて、尾または腹部、頭、アンテナ、下顎、さらには機能的な目もあります。これらすべてにより、ヘキサポッドはアリのように見えるため、ArduinoAntRobotと呼ぶこともできます。
次のビデオを見るか、以下のチュートリアルを読むことができます。
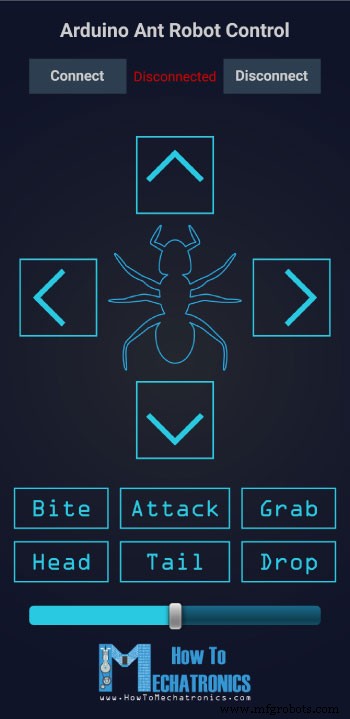
ロボットを制御するために、カスタムビルドのAndroidアプリケーションを作成しました。このアプリには4つのボタンがあり、ロボットに前後に移動したり、左または右に回転したりするように指示できます。これらの主な機能に加えて、ロボットは頭と尻尾を動かすことができ、物を噛んだり、つかんだり、落としたり、攻撃したりすることもできます。
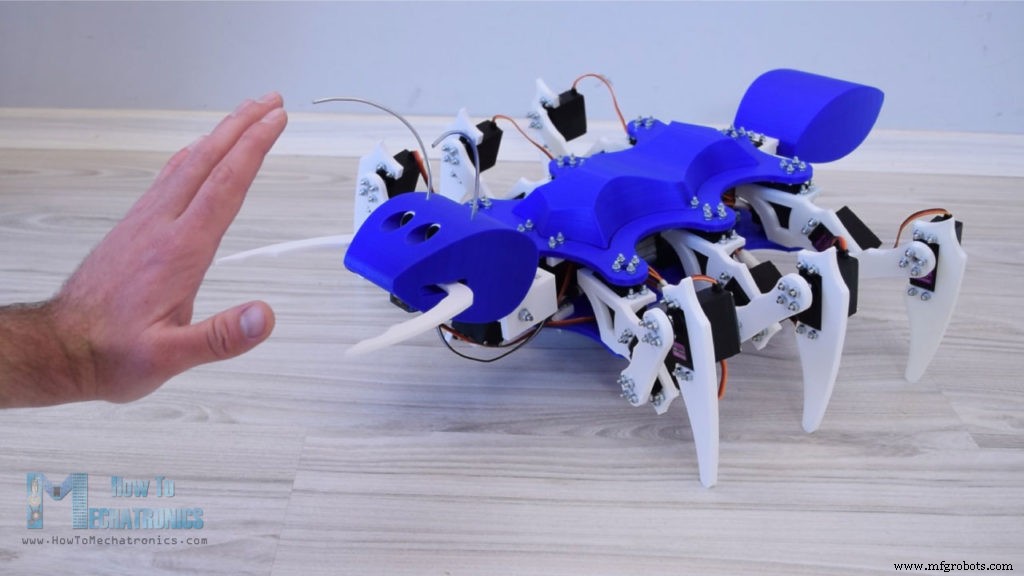
先に述べたように、ロボットには機能的な目があります。または、超音波センサーに合うように頭を特別に設計しました。したがって、ロボットの頭に触れたり、センサーに手を近づけたりしようとすると、ロボットは最初に攻撃の準備をします。
後ろに戻るとロボットは攻撃を却下しますが、手を近づけると攻撃して噛みつきます。それで、それはどれほどクールですか?固執すれば、私がそれをどのように構築し、すべてがどのように機能するかを正確に知ることができます。
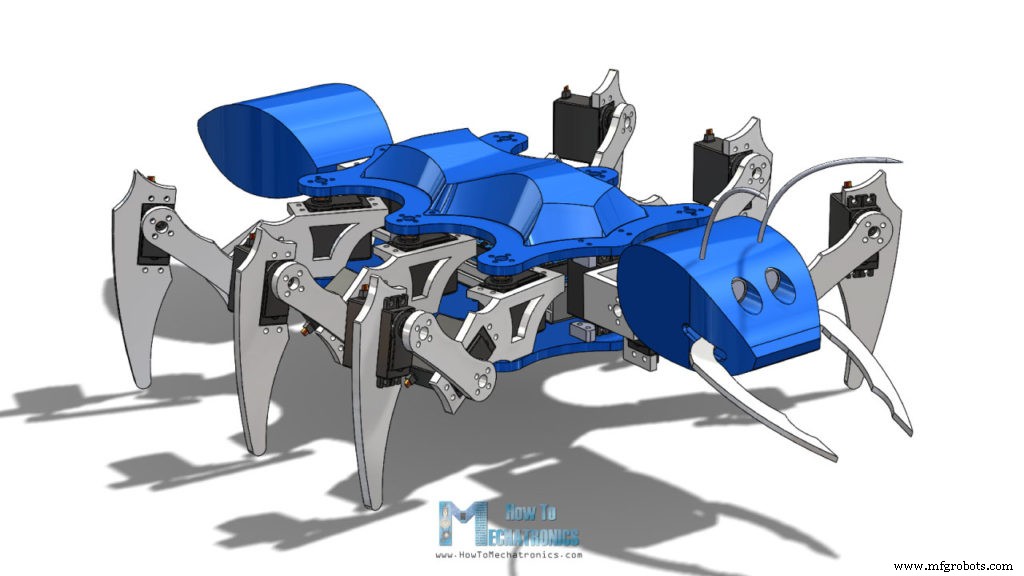
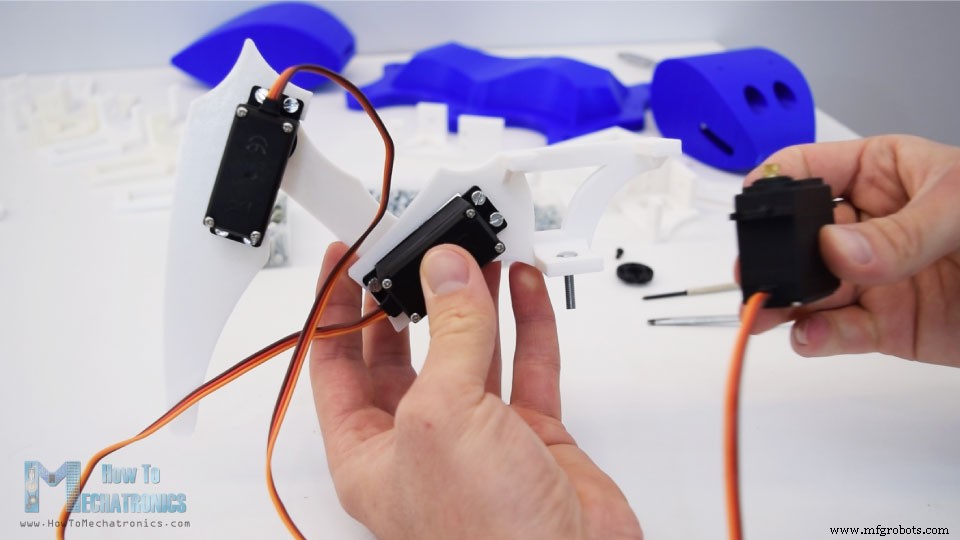
いつものように、私は3Dモデリングソフトウェアを使用してヘキサポッドを設計することから始めました。ヘキサポッドには6つの脚があり、それぞれが3つのジョイントまたは3つのサーボで構成されています。つまり、合計18個のサーボが必要であり、私の場合はMG996Rサーボを使用しました。
裏側には、別のMG996Rサーボによって駆動されるテールがあります。このアリのロボットの頭には2つの自由度があります。または、回転したり傾いたりすることができ、さらに2つのサーボによって駆動されます。したがって、このプロジェクトには合計21のサーボ、タイプMG996R、さらに下顎用の1つの小さなSG90マイクロサーボが必要です。
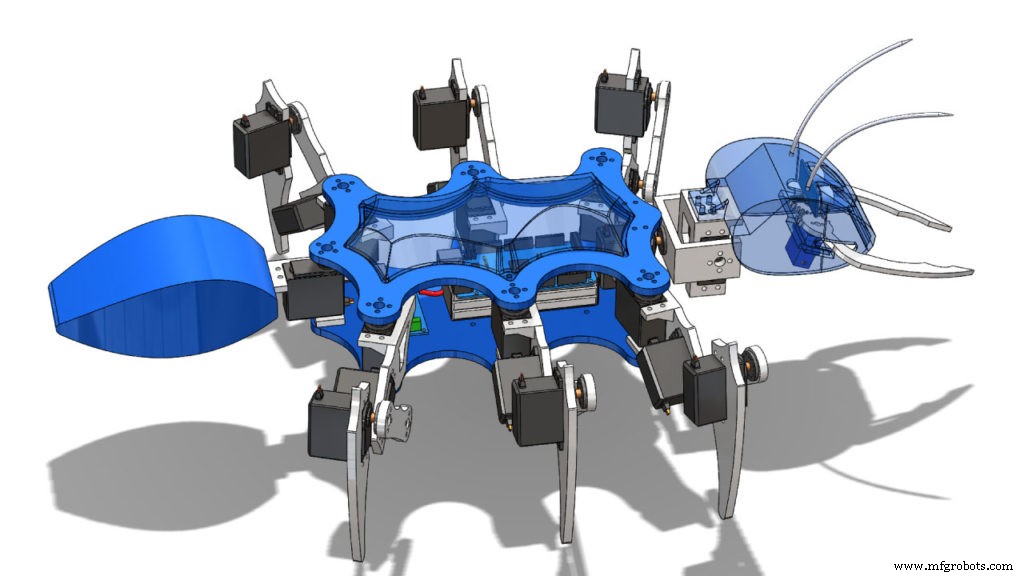
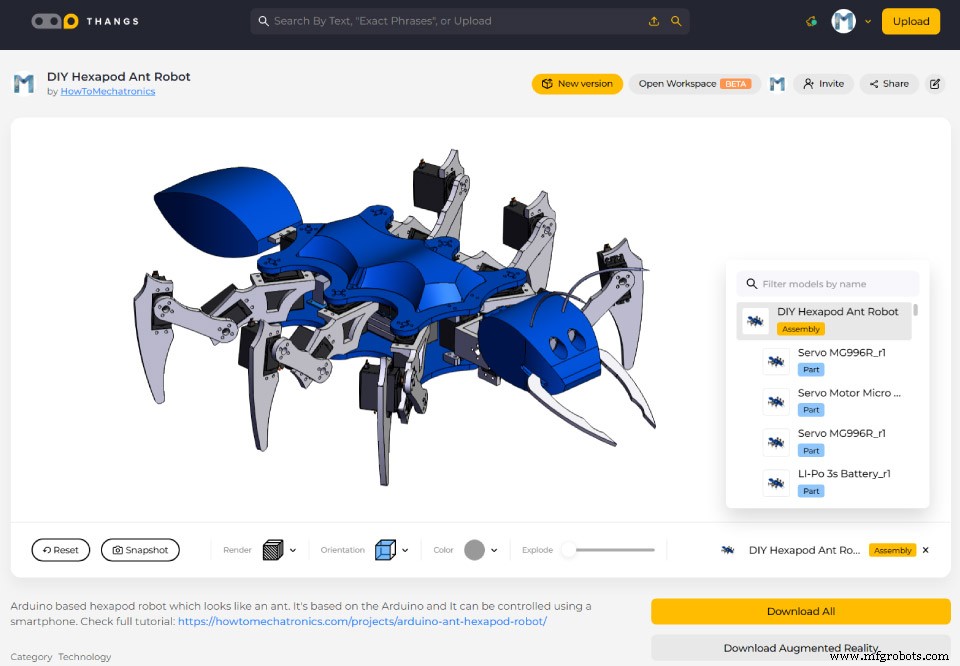
ここには、HC-SR04超音波センサーに合うように設計されたアリの目もあります。すべての部品は2つのプレートの間に組み立てられ、さらに2つのプレート間のすべての配線、Arduino、およびバッテリーを隠すために、トッププレートに興味深い湾曲したカバーを作成しました。
この3Dモデルを見つけてダウンロードしたり、Thangsのブラウザで調べたりすることができます。
STLファイル:
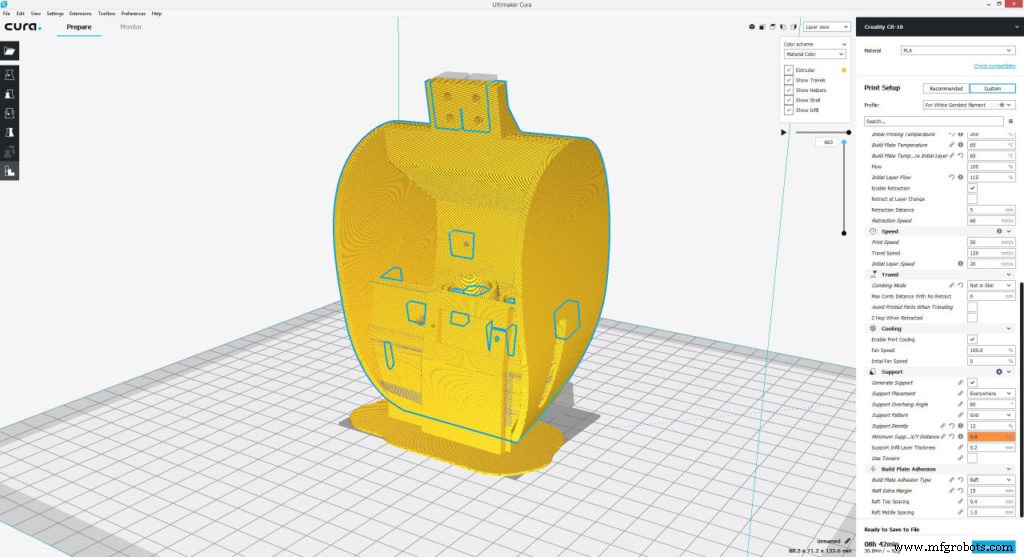
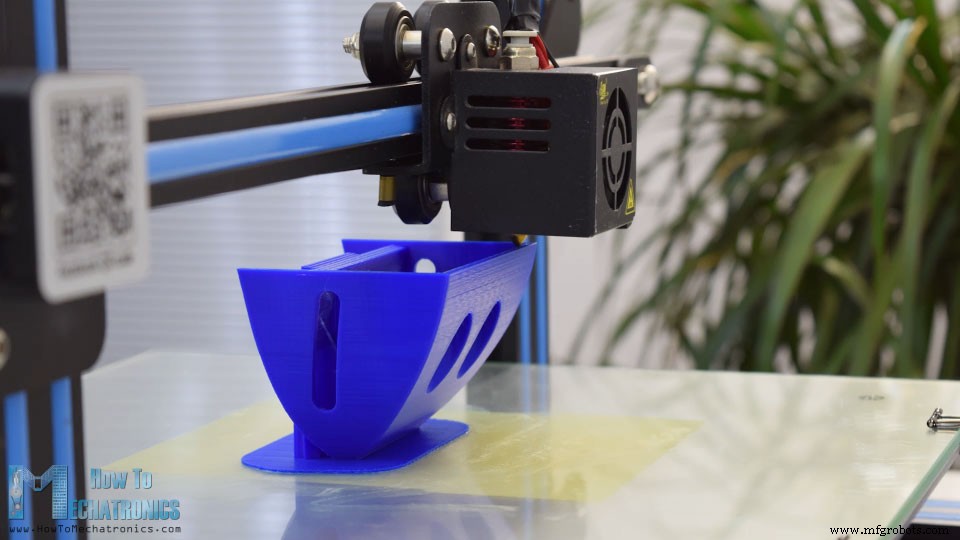
次はもうご存知だと思います。それはロボット部品の3Dプリントです。私はすべてのプリントにCrealityCR-103Dプリンターを使用しましたが、それは素晴らしい仕事をしました。シングルプリントになりたかったので、プリントするのが一番大変だったのはヘッドでした。
そのために、60度のサポートオーバーハング角度といくつかのサポートブロッカーを使用する必要がありました。とにかく、Creality CR-10は素晴らしい仕事をし、頭は完璧になりました。
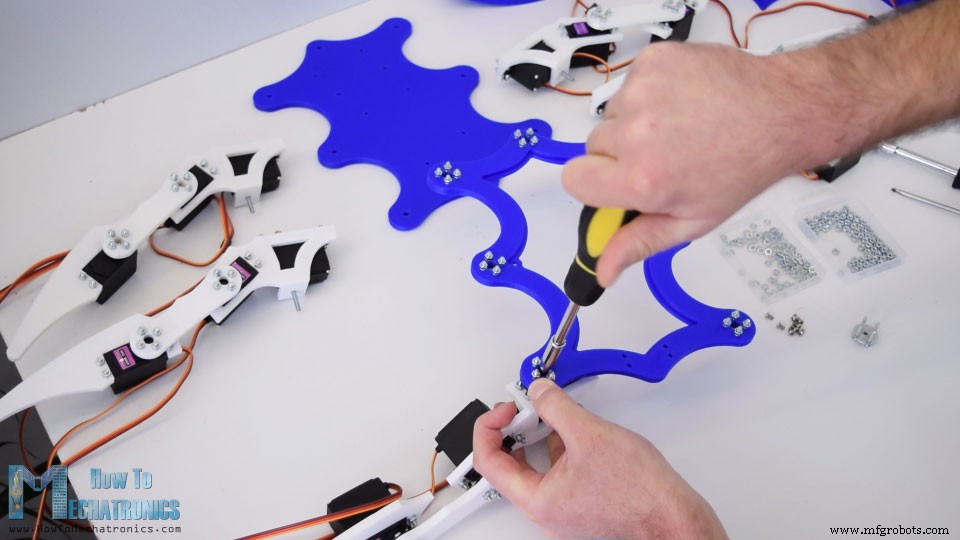
すべてのパーツを印刷したら、ヘキサポッドの組み立てに進むことができます。私は足を組み立てることから始めました。印刷部品にサーボを固定するために、M3ボルトとナット、およびスプリングワッシャーを使用しました。ボルトの長さは少なくとも12mmである必要があり、私の場合は16mmの長さのボルトを使用しました。
アセンブリ全体で約200本のボルトが必要です。リンクを相互に接続するために、サーボパッケージに付属している丸いホーンをアクセサリとして使用します。ただし、ボルトが貫通できるように、それぞれに3mmの穴を開ける必要があります。または、M3スレッドがあり、個別に購入できる金属製の丸いホーンを使用することもできます。
リンクをサーボに固定するときは、常に同じ位置にリンクし、可動域がすべてあることを確認する必要があります。
ここで、サーボの上面に小さな三角形のサポートがあり、これを取り外す必要があることに注意してください。私はそれを行うために簡単な万能ナイフを使用したので、そのようにしてサーボを印刷された部品と一緒にフラッシュに配置することができます。 3番目のサーボを所定の位置に挿入する前に、まず、脚をベースプレートに接続するために使用されるM4ボルトを挿入する必要があります。
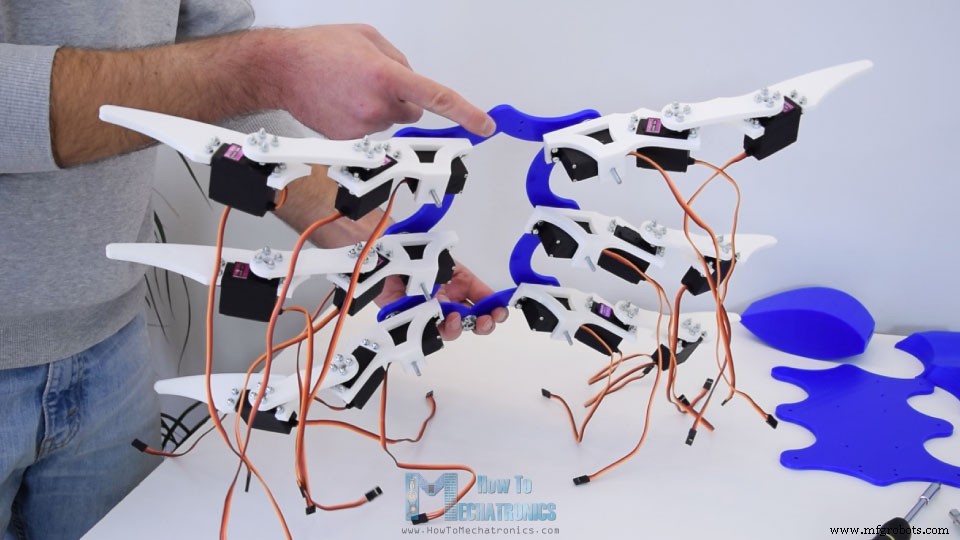
レッグアセンブリは次のようになります。実際には組み立ては非常に簡単ですが、今ではさらに5つ必要です。
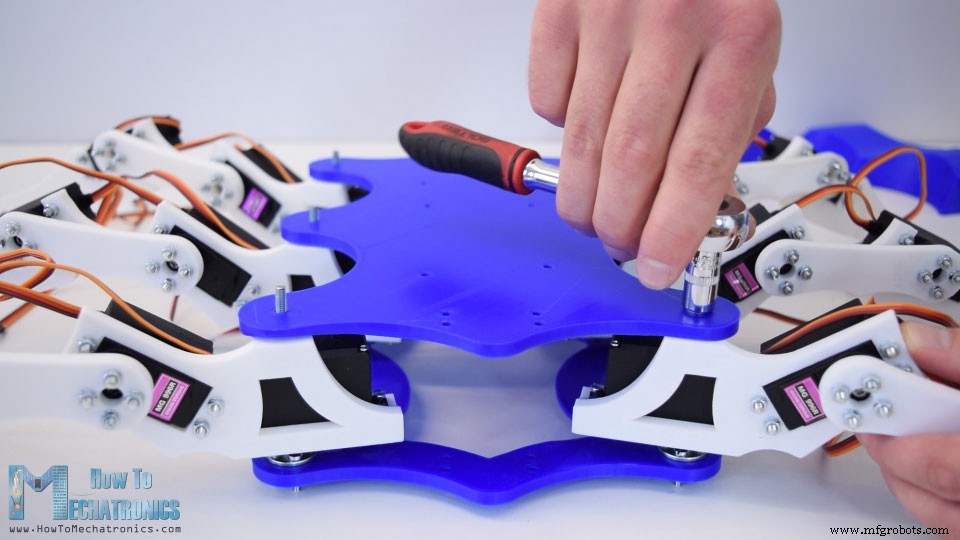
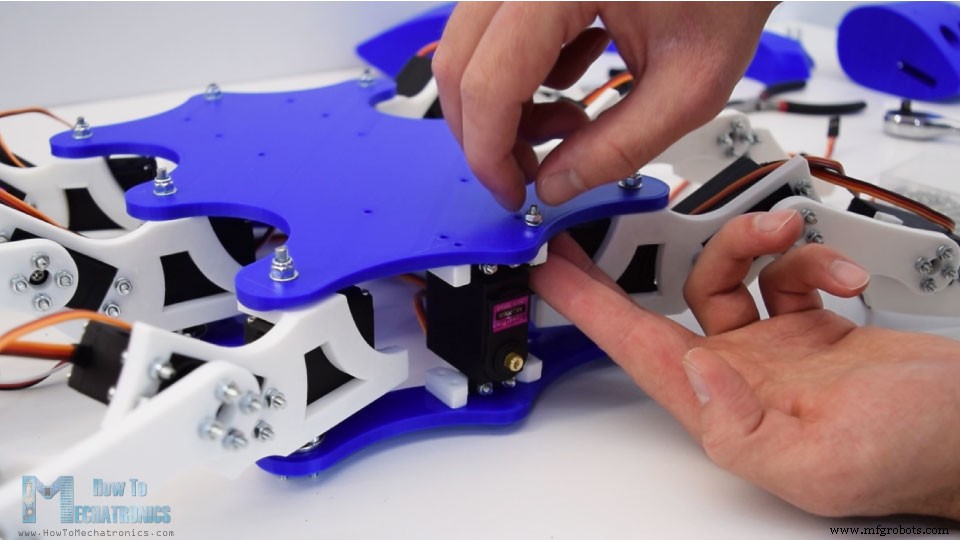
すべての脚の準備ができたら、ロボットの本体または2つのプレートに脚を取り付けます。まず、M3ボルトとナットを使用して、以前と同じ方法を使用して、丸いホーンを上部プラットフォームに固定する必要があります。次に、ボルトを使用してサーボシャフトに接続するだけですが、その前に、サーボの位置を正確に真ん中に調整する必要があります。
これは、サーボの全可動域を取得し、Arduinoをプログラミングする際の調整またはキャリブレーションプロセスを削減するために必要です。
脚を固定した後、このプロジェクトはすでに形になり始め、ヘキサポッドのように見えました。
裏側にもう1つ丸いホーンがあります。これはテールサーボ用で、このポイントでも固定する必要があります。
次に、ヘキサポッドを上下逆に配置する必要があります。これにより、脚のM4ボルトを通して底板を挿入できるようになります。次に、いくつかの平ワッシャーとセルフロックナットを使用して脚を固定しました。これらのボルトは実際にはピボットジョイントであり、脚も十分に固定された状態で回転できる必要があるため、これらのボルトをどれだけ締めるかに注意する必要があります。
次に、ヘッド用の最初のサーボを取り付ける必要があります。これはロールムーブメント用です。このサーボはベースプレートに対して垂直に配置する必要があるため、その目的のために、最初にサーボに固定される2つの小さなプレートを作成しました。次に、2つのプレートの間にサーボを挿入し、M3ボルトとナットで簡単に固定できます。
次に、U字型のブラケットがあり、ここでは、ヘッドの2つのサーボを接続するために2つの丸いホーンを取り付ける必要があります。ブラケットをロールサーボに固定する前に、サーボの位置が中央にあり、両方向に90度回転できることを確認する必要があります。
次はチルトサーボブラケットです。したがって、ここではまずM4ボルトを挿入し、U字型のブラケットに固定する必要があります。チルトモーターを取り付ける前に、後でヘッドを固定するために使用される4本のM3ボルトも挿入する必要があります。次に、チルトサーボをブラケットに挿入し、シャフトを丸いホーンに慎重に取り付けます。ここでは少しきついですが、U字型のブラケットは少し曲がるのに役立ちます。
最後に、M3ボルトでサーボを固定し、ヘッド機構を完成させる必要があります。これで、回転と傾斜の両方が可能になりました。
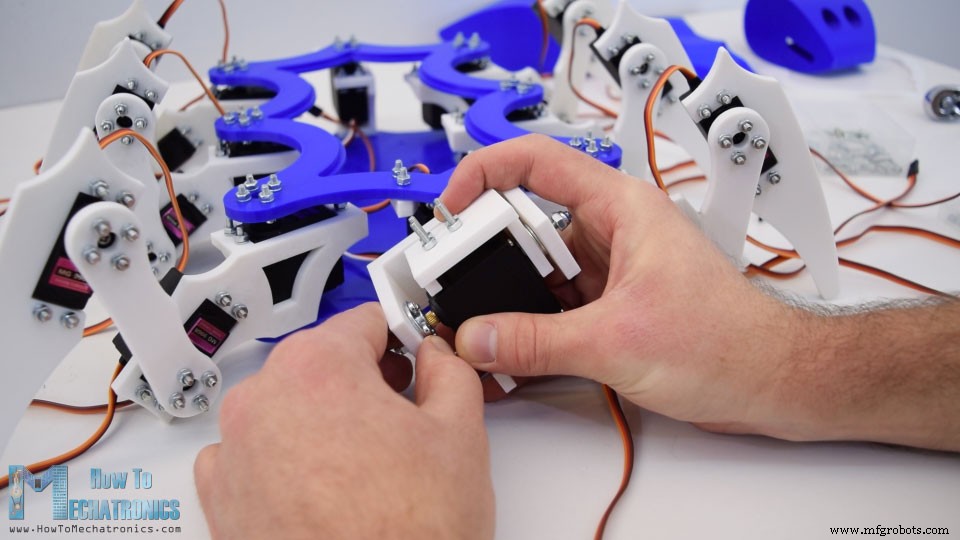
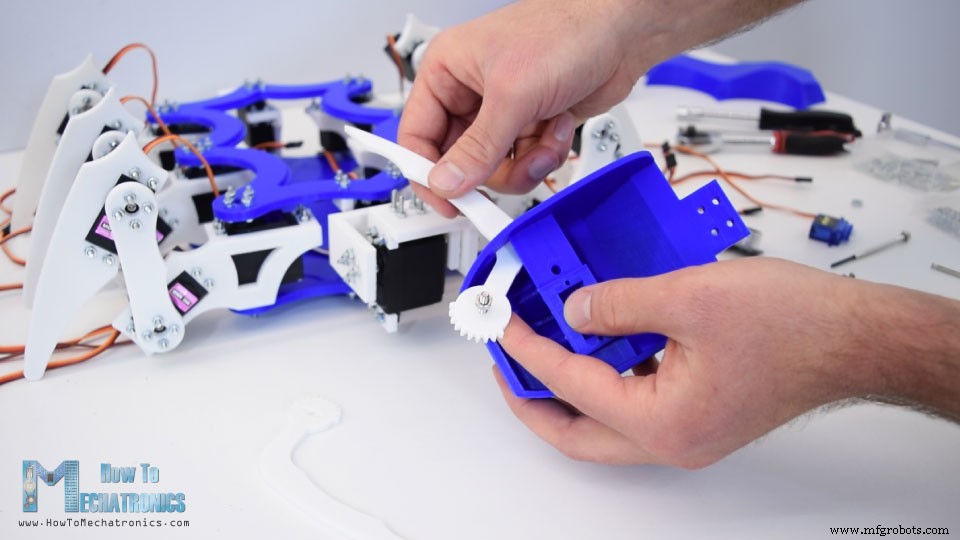
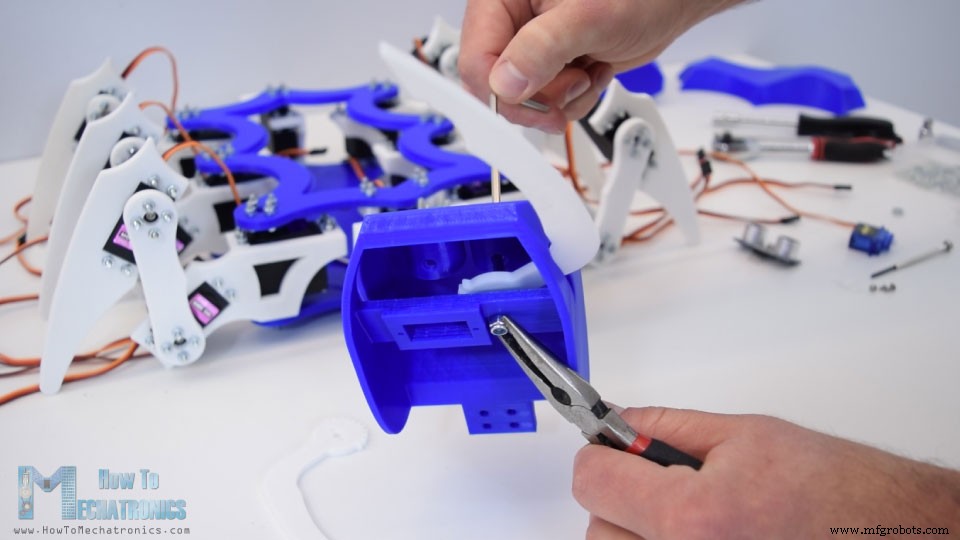
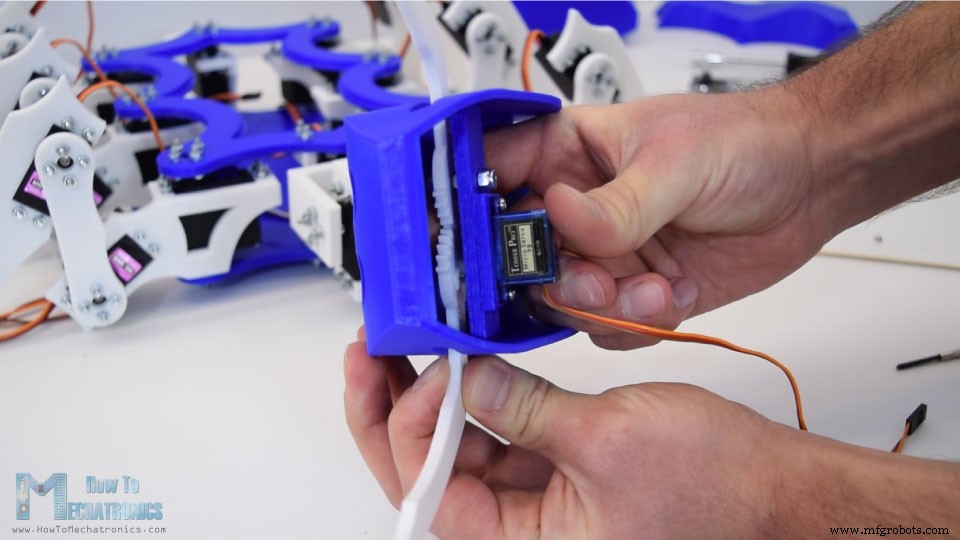
ヘッドをメカニズムに取り付ける前に、ヘッドを事前に組み立てるか、小型のSG90サーボと超音波センサーを使用して下顎を取り付ける必要があります。ここでも少しきついですが、それでも最初の下顎を挿入し、M4ボルトを使用して頭に固定することができました。
目の部分に小さな穴があり、ドライバーを通り抜けてボルトを締めることができるように特別に設計されています。
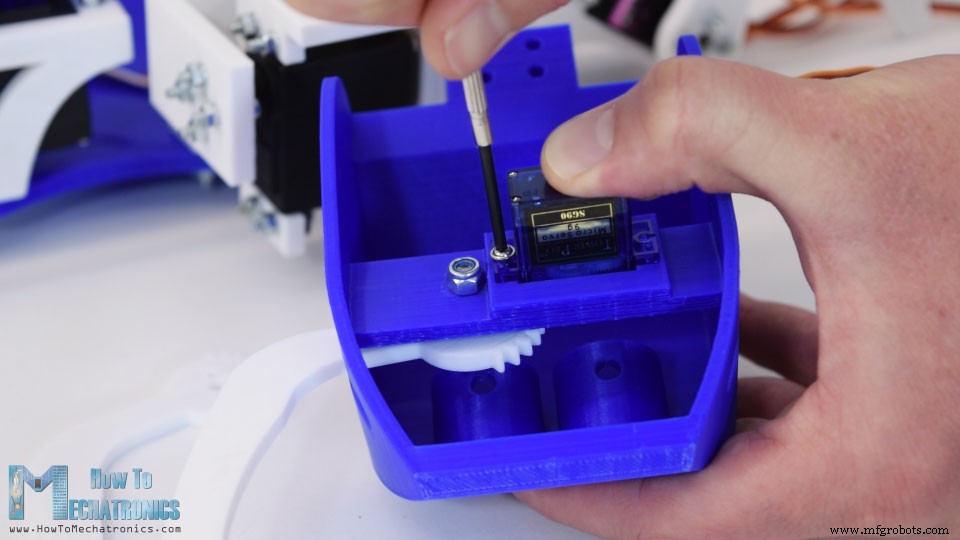
次にマイクロサーボを所定の位置に配置し、2本のネジで固定します。 2番目の下顎骨では、最初にSG90サーボ用の小さなアームホーンを取り付ける必要があります。
次に、下顎を所定の位置に挿入し、2つのギアをペアにして、ドライバーを使用してモーターシャフトに固定します。
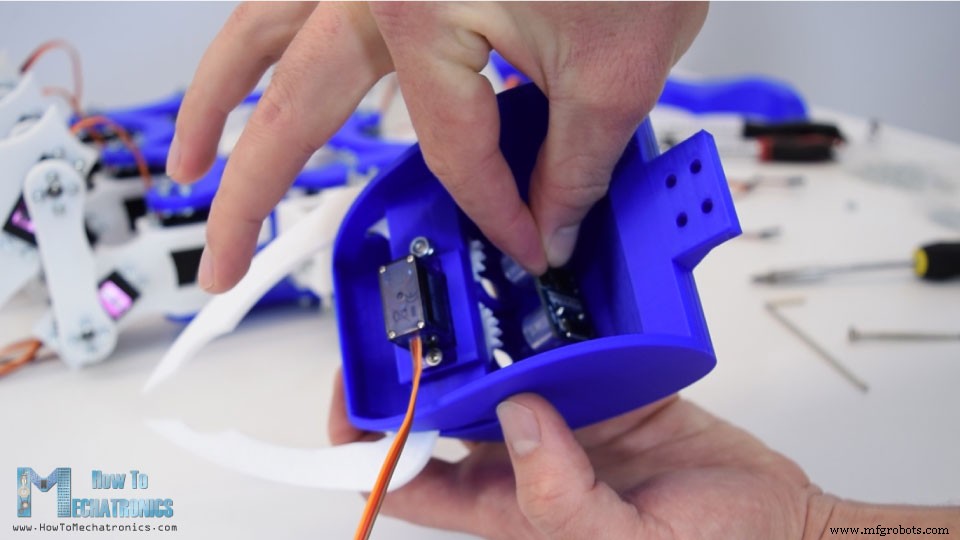
次に、超音波センサーを配置します。目の穴は超音波センサーにぴったり合うように作られているので、センサーを頭に固定するためにAC接着剤を数滴使用しました。
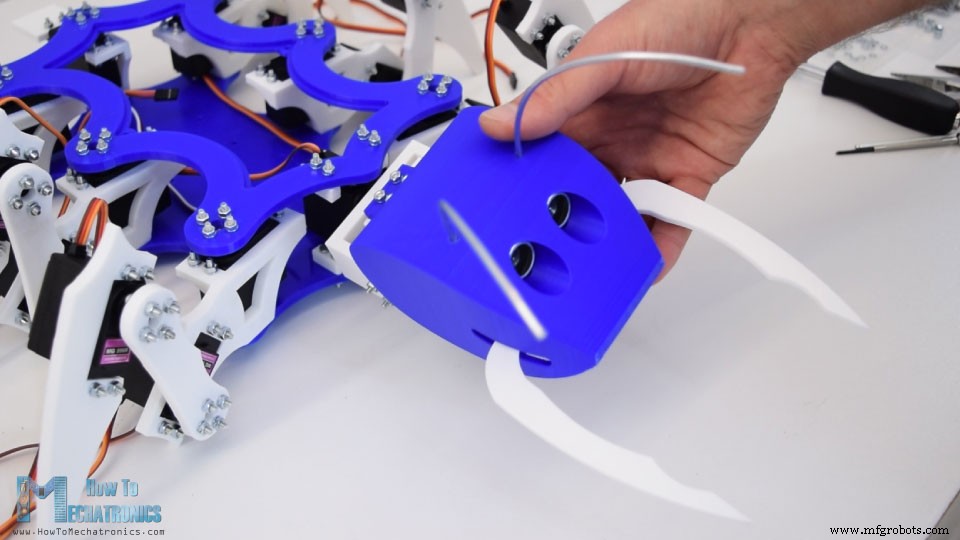
ヘッドに追加するもう1つの詳細があり、それがアンテナです。そのために、3mmの目盛りワイヤーを使用し、長さ約13cmにカットし、少し曲げて希望の形にしました。ここでも、AC接着剤を数滴使用して頭に固定しました。最後に、前に挿入した4本のボルトでヘッドをロールアンドチルトメカニズムに取り付けることができます。
ヘッドは完全に機能するようになり、転がったり、傾いたり、噛んだりすることもできます。インストールする3Dプリントパーツがさらに2つあります。これは、テールブラケットに簡単にスライドできるテールと、電子機器を覆うために実際に最後に使用する湾曲したカバーです。これが私たちのアリロボットの最終的な外観であり、この青と白の色の組み合わせでどのようになったかが本当に気に入っています。
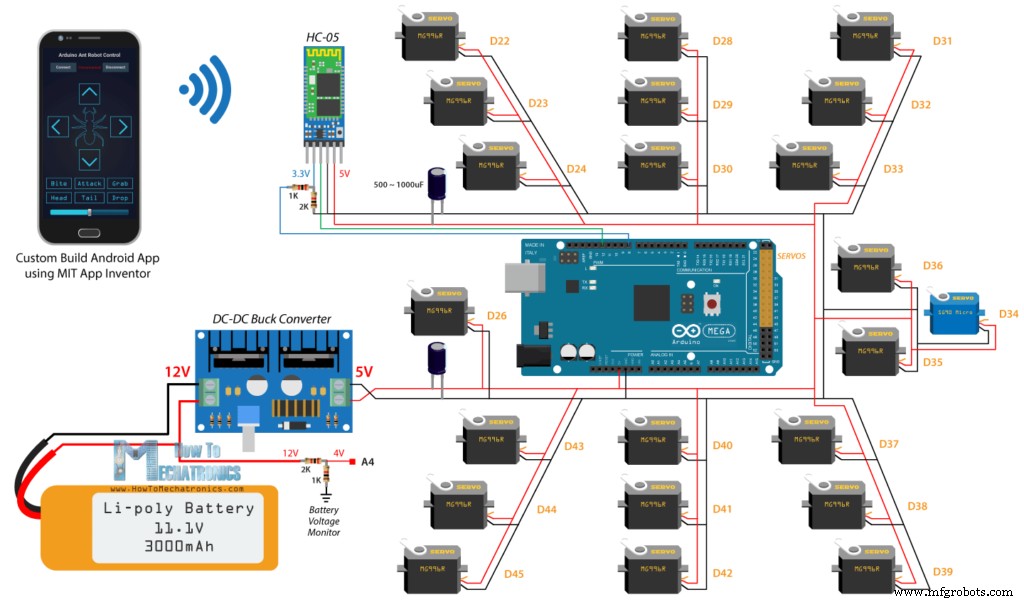
さて、これで電子機器に進むことができます。これがこのプロジェクトの回路図です。サーボ接続が多いため少し複雑に見えますが、実際には単純です。
22個のサーボに加えて、スマートフォン通信用のHC-05 Bluetoothモジュールと、いくつかのコンデンサーと抵抗器が必要です。もちろん、ロボットの頭脳はArduinoボードです。この場合、Servoライブラリを使用して12を超えるサーボを制御できる唯一のボードであるため、ArduinoMegaです。
関連チュートリアル:サーボモーターの仕組みとArduinoを使用してサーボを制御する方法
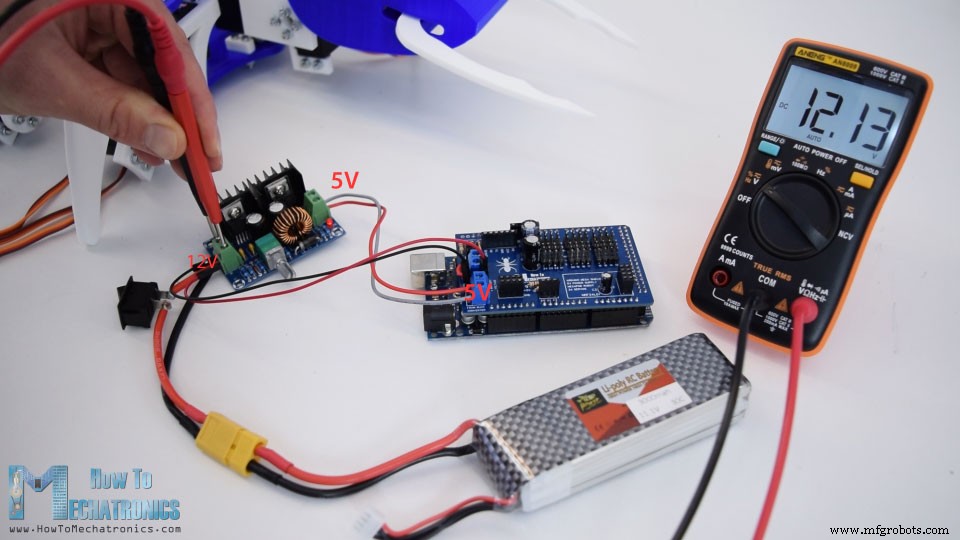
ロボットに電力を供給するために、電圧が約12Vの3SLiPoバッテリーを使用します。 LiPoバッテリーは、より多くの電流を処理できるため、すべてのサーボが全負荷で同時に作動すると、約10アンペアの電流を引き出すことができるため、このプロジェクトに適しています。ただし、サーボの動作電圧は4.8〜7.2Vに制限されているため、12Vを5Vに変換するにはDC-DCバックコンバータを使用する必要があります。完全にロードされたときに約7.4Vまたは8.4Vの電圧を持つ2SLiPoバッテリーを使用する場合でも、バックコンバーターを使用する必要があります。このプロジェクトで使用するバックコンバーターは、最大8アンペアの電流を処理できますが、十分な電力があり、過熱しないようにするために、10〜15Aの1つを使用することをお勧めします。私の場合、移動中にロボットから気付いた最大消費電流は約6アンペアでした。
このプロジェクトに必要なコンポーネントは、以下のリンクから入手できます。
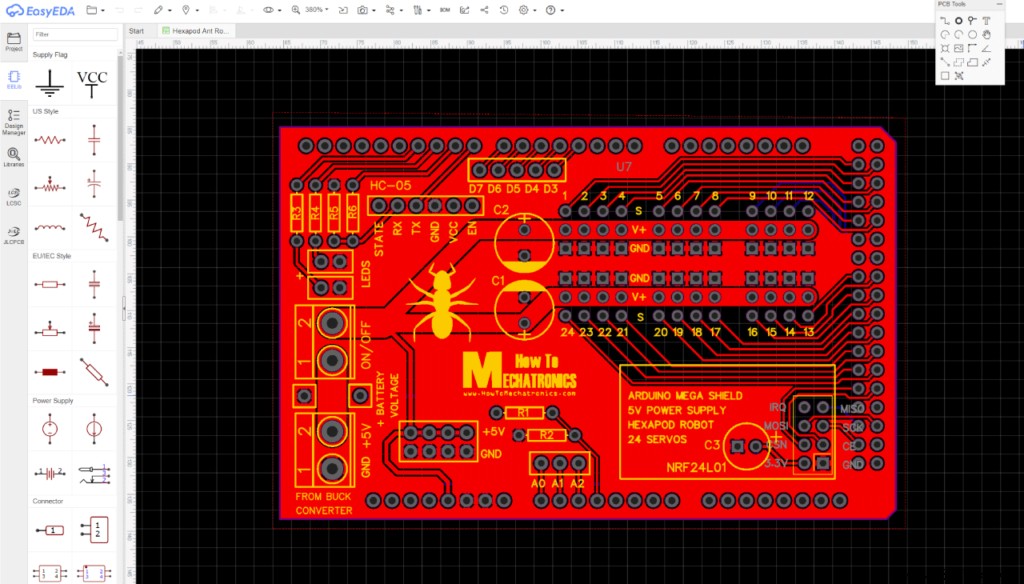
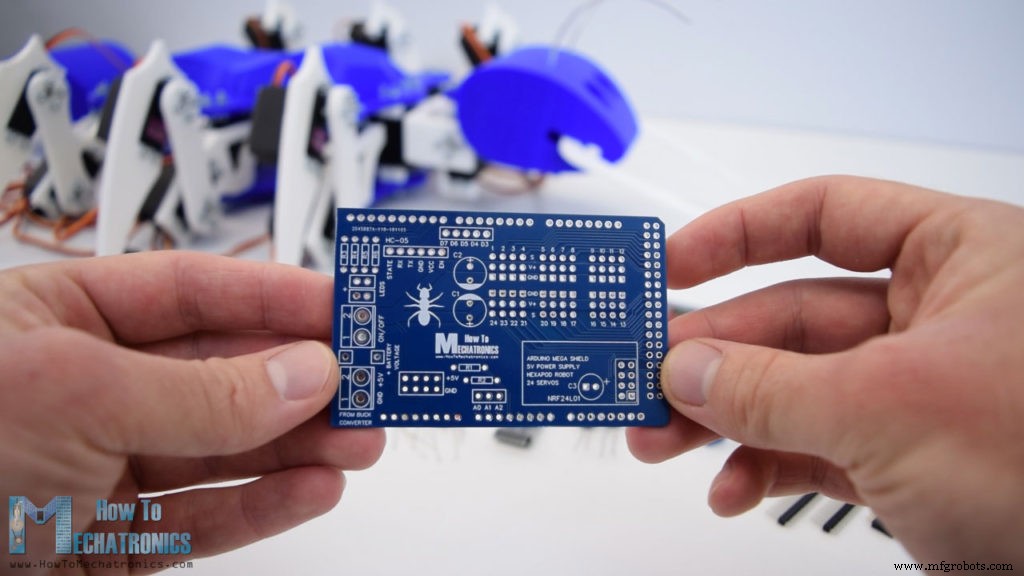
今、すべてを一緒に接続しようとすると、サーボ接続が多いため、かなり混乱します。そのため、EasyEDAの無料オンライン回路設計ソフトウェアを使用してカスタムPCBを設計しました。このPCBは、Arduinoメガボードの上に直接接続できるため、実際にはヘキサポッドのArdunoメガシールドとして機能します。サーボ接続を互いに近くに配置し、電圧をより安定させるために、それらの隣に2つの大きなコンデンサを含めました。また、ラジコンを使用してロボットを制御したい場合に備えて、NRF24L01トランシーバーモジュールの接続を含めました。いくつかのデジタルおよびアナログピン接続、5Vおよびアース接続、2つのLED接続、およびバッテリ電圧を監視するための接続があります。 12Vのバッテリ電圧は、2つの抵抗R1とR2で構成される分圧器を通過します。これにより、電圧が5V未満に低下し、アナログピンが安全に読み取ることができます。このようにして、バッテリーをいつ再充電する必要があるかがわかります。
このPCBデザインのプロジェクトファイルへのリンクは次のとおりです。そのため、設計が完了したら、PCBを製造するために必要なガーバーファイルを生成しました。
ガーバーファイル:
次に、実際にこのビデオのスポンサーであるJLCPCBにPCBを注文しました。
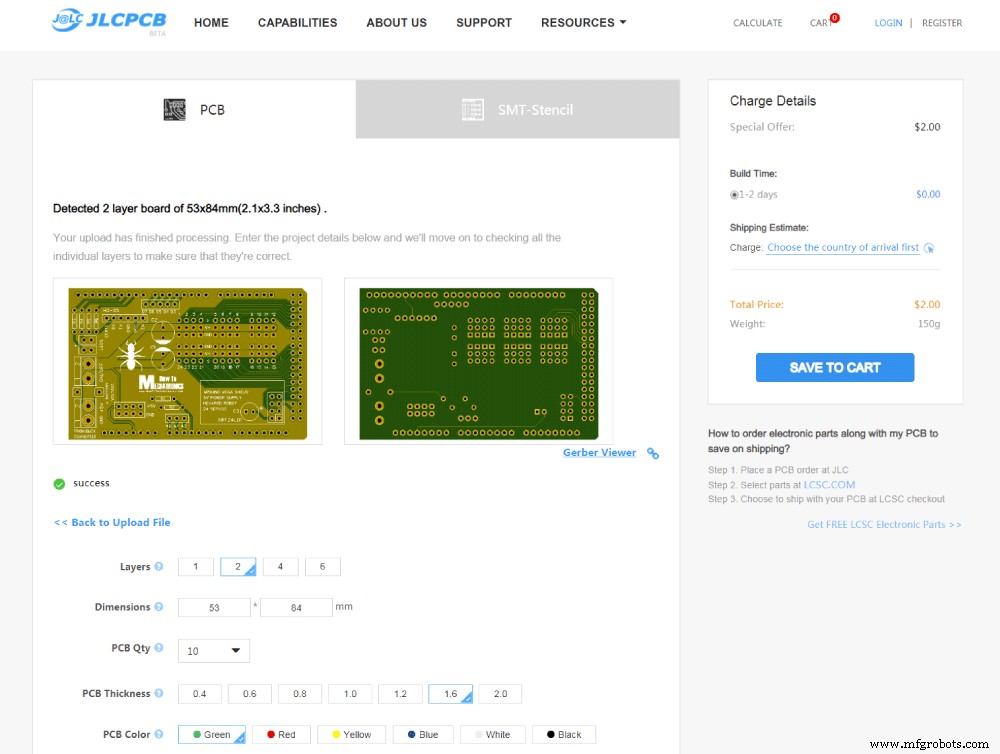
ここでは、ガーバーファイルをドラッグアンドドロップするだけで、アップロードしたら、ガーバービューアでPCBを確認できます。すべて問題がなければ、先に進んでPCBに必要なプロパティを選択できます。この場合、Arduinoボードの色と一致させるために、PCBの色を青に選択しました。これで、PCBをリーズナブルな価格で簡単に注文できるようになりました。 JLCPCBからの最初の注文の場合、わずか2ドルで最大10個のPCBを入手できることに注意してください。
数日後、PCBが到着しました。 PCBの品質は素晴らしく、すべてが設計とまったく同じです。
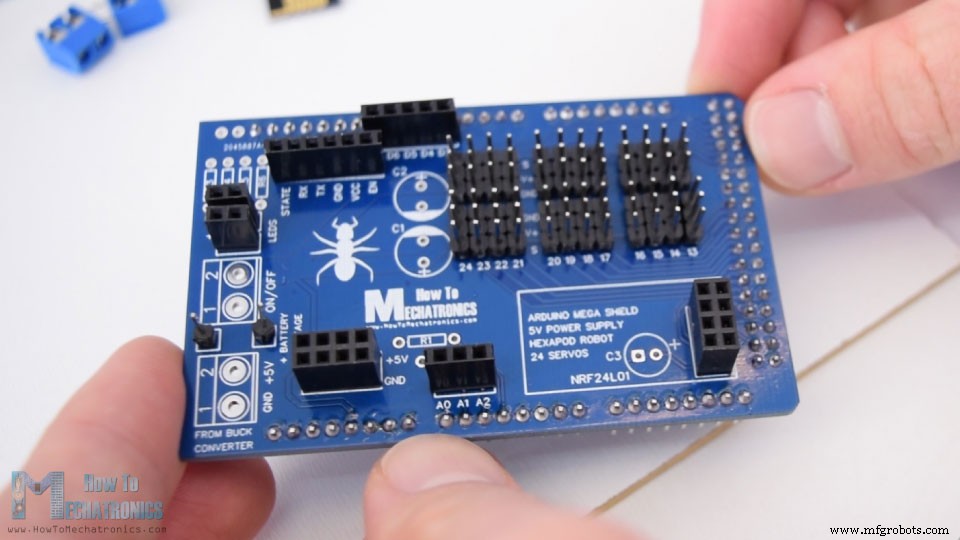
これで、PCBを組み立てることができます。まず、Arduinoボードに接続するために使用されるPCBにオスのピンヘッダーをはんだ付けすることから始めました。ピンヘッダーを下側に配置したら、ピンを保持してボードを裏返すようなプレートを使用できます。次に、それらすべてをPCBにはんだ付けする必要があります。それが終わったら、オスのピンヘッダーも必要なサーボ接続に進むことができます。
この時点で、実際にすべての接続にピンヘッダーを挿入し、同じ方法を使用してPCBを裏返し、すべてのピンをそれにはんだ付けすることができます。最後に、抵抗、コンデンサ、端子台をはんだ付けする必要があります。これで、Antロボット用のArduinoメガシールドの準備が整いました。これで、Arduinoボードに挿入するだけで済みます。
次に、降圧コンバータの出力電圧を5Vに設定する必要があります。これは、バックコンバータのポテンショメータを調整することで実現できます。ここで、入力に電源スイッチを追加し、バッテリー電圧の監視にのみ使用されるPCBの12Vピンにバッテリー12Vを接続したことがわかります。
PCBへのメイン入力は5Vでなければならないことに注意してください。
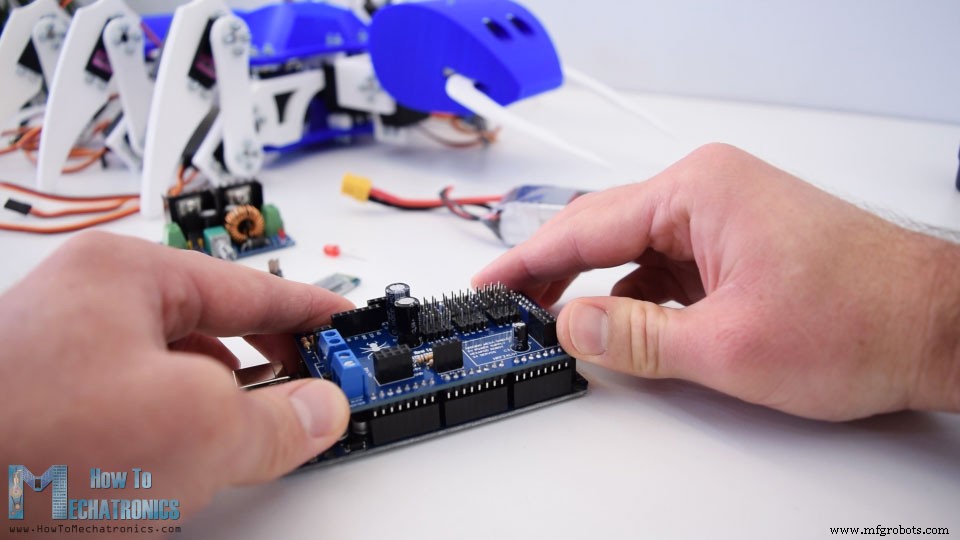
これで、2つのプレートの間に電子部品を挿入できます。繰り返しますが、少しきついですが、それでもすべてを収めることができます。最初に、テープを使用して固定したバッテリーを取り付け、その上に、作成したPCBと一緒にArduinoを取り付けます。次に、使用する通信の種類に応じて、NRF24L01トランシーバーまたはBluetoothモジュールのみを接続できます。また、バッテリーをいつ再充電する必要があるか、または電圧が11Vボルトを下回った場合に備えてLEDを挿入しました。最後に、すべてのサーボをサーボピンに接続する必要があります。これを行うときは、各サーボを接続したピン番号を必ず書き留めてください。すべてのサーボを接続したら、湾曲したカバーを天板に置くだけで、実際にこのプロジェクトが完了します。
このビデオであとは、Arduinoプログラムがどのように機能するかを見てみましょう。コードが少し長いので、理解を深めるために、プログラムのソースコードを各セクションの説明とともにセクションに投稿します。そして、この記事の最後に、完全なソースコードを投稿します。
したがって、サーボを制御するために基本的なサーボライブラリを使用し、Bluetooth通信のためにSoftwareSerialライブラリも含める必要があります。まず、すべてのサーボオブジェクトと、以下のプログラムに必要ないくつかの変数を定義する必要があります。
セットアップセクションでは、Bluetooth通信、超音波センサーのピンモード、LEdを初期化し、サーボが接続されるピンを定義する必要があります。
次に、write()関数を使用して、サーボを初期位置に移動します。ここで実際にサーボを調整できます。ロボットを組み立てるときに各サーボを正確な位置に設定することはできないと考えてください。ただし、ここで調整を行って初期値を確認し、そこからロボットの動きをプログラムできます。
ヘキサポッドの動きをプログラムする場合、順方向または逆方向の運動学を使用するなど、いくつかの方法があります。これらの方法には、各関節の位置が体の望ましい最終位置の入力に基づいて計算されるいくつかの深刻な数学が含まれます。しかし、とにかく私が使用しているサーボはそのようなタスクには十分ではないので、少し複雑さを少なくすることにしました。それは私のサーボがMG996Rサーボの安価なバージョンだからです。それらには適切なトルクがなく、常に正確な目的の位置に配置されるとは限りません。
それでは、私がどのようにしてヘキサポッドを歩かせたかを見てみましょう。各脚を動かすための個別のカスタム関数を作成しました。レッグサイクルには、スイングとスタンスと呼ばれる2つのフェーズが含まれます。スイングフェーズでは、脚は空気を介して初期位置から最終位置に移動し、スタンスフェーズでは、脚は最終位置から初期位置に戻り、レッグエンドエフェクタが地面に接触します。このようにして、ヘキサポッドの本体が前方に移動します。
そこで、メインループといくつかのカウンターを使用して、これらの動きを実現するために各サーボの位置を手動でプログラムします。
したがって、最初に2つの外側のサーボが脚を上げ、ボディに接続された3番目のサーボが特定の方向に回転し始めます。 3番目のサーボが回転を停止する前に10ステップになると、外側の2つのサーボを同じ位置で後ろに動かして地面に接触し始めます。これでスイングフェーズが完了するか、脚が初期位置から最終位置に移動します。次に、3番目のサーボを最終位置から初期位置に回転して戻します。これでスタンスフェーズが完了します。レッグが1サイクル実行すると、カウンターがリセットされ、レッグはそのサイクルを何度も繰り返します。各反復またはステップは、サーボの速度を制御する遅延時間もあるメインループセクションで実行されます。他のすべての脚に対してこのような機能を作成しました。また、脚を反対方向に動かして逆、左、右の動きを実現するためのいくつかの追加機能も作成しました。同様に、カウンターを使用してステップを追跡し、頭の移動、尻尾の移動、下顎などの残りの機能をプログラムしました。
したがって、たとえば、ロボットを前進させたい場合は、メインループで常に繰り返される6つのmoveLeg()カスタム関数を呼び出す必要があります。
3つのレッグがオフセットされていることがわかります。したがって、レッグ番号1、3、および5がスイングフェーズにある場合、他の3つのレッグ、2、4、および6はスタンスフェーズにあります。左に移動したい場合は、適切なmoveLeft()関数を呼び出します。
これらのコマンドは、実際にはBluetoothモジュールまたはスマートフォンのカスタムビルドのAndroidアプリケーションから送信されます。
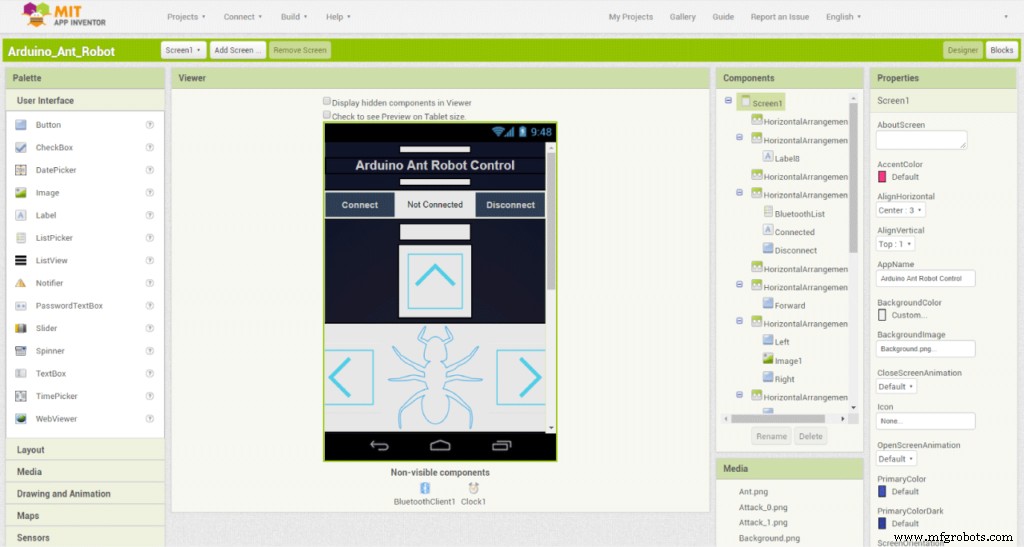
今すぐアプリを見て、実際にArduinoに送信されているデータの種類を見てみましょう。 MITAppInventorオンラインアプリケーションを使用してアプリを作成しました。その仕組みは次のとおりです。
つまり、アプリのグラフィックは、実際には私が作成してボタンとして配置した画像です。下部にはロボットの速度を制御するためのスライダーがあり、上部にはBluetoothモジュールに接続するためのボタンがあります。
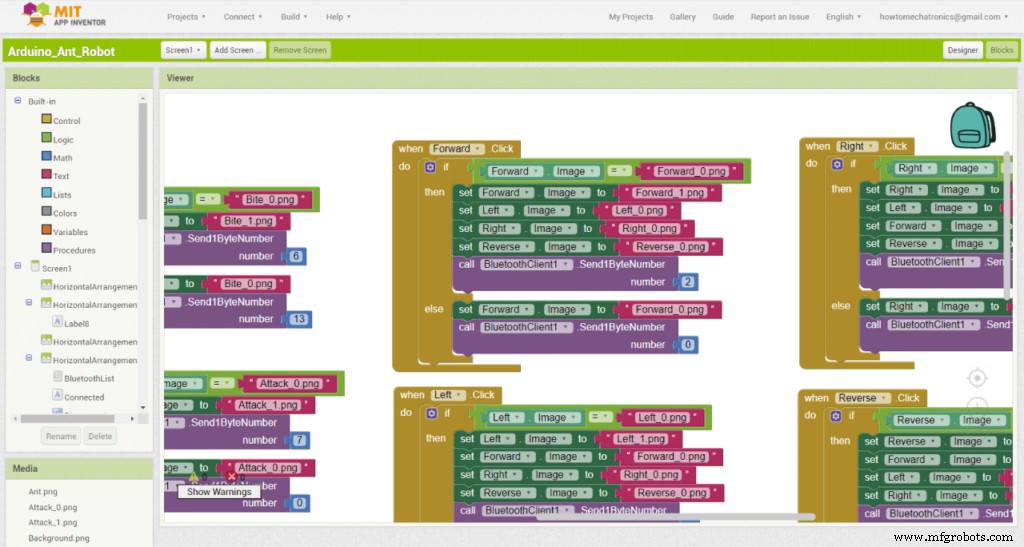
プログラムまたはアプリの背後にあるブロックを見てみましょう。
したがって、たとえば、[進む]ボタンをクリックすると、「if」ステートメントのブロックが実行されます。つまり、番号2をArduinoに送信し、それが関数の前進セットを実行することを意味します。同時に、ボタンの画像を同じ画像の他の強調表示されたバージョンに変更していることがわかります。同じボタンをもう一度押すと、「else」ステートメントのブロックが実行され、Arduinoに数値0が送信され、すべてのカウンターがリセットされ、ロボットが初期位置に移動します。また、そのボタンの初期画像を元に戻しました。そのため、他のすべてのボタンにも同じ原則を使用しました。
上記のMITAppInventorプロジェクトのダウンロードファイルと、スマートフォンにインストールする準備ができているAndroidアプリは次のとおりです。
Arduinoプログラムのさらに2つの機能、つまりバッテリー電圧モニターと超音波センサーを見てみましょう。
したがって、バッテリー電圧が11ボルト未満の場合は、LEDをオンにし、超音波センサーが40 cmに近い物体を検出すると、ロボットは攻撃の準備をします。
前方に物体がなくなった場合は攻撃を却下し、物体がまだ存在していて頭の近くにある場合はロボットが攻撃します。
これで、この動画のほとんどすべてです。
ここで、このArduinoHexapodプロジェクトの完全なコードをダウンロードできます:
このプロジェクトを構築する場合は、いくつかの課題に直面する準備をする必要があることに注意してください。私にとって最大の問題は、使用したサーボのパフォーマンスが悪いことでした。このビデオを楽しんで、何か新しいことを学んだことを願っています。以下のコメントセクションで質問をして、Arduinoプロジェクトコレクションを確認してください。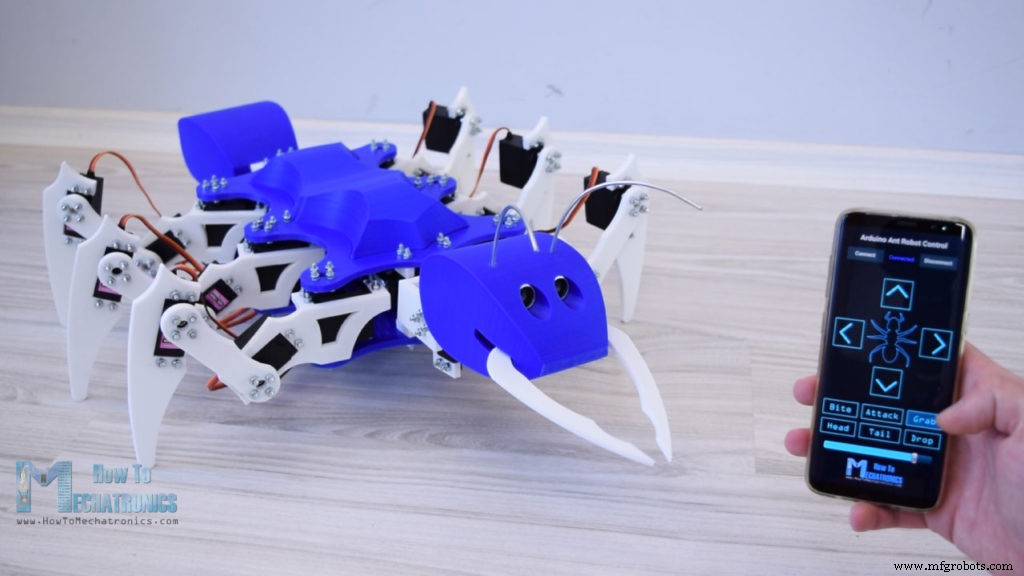
Arduinoヘキサポッド–Antロボット3Dモデル
Arduinoヘキサポッドの組み立て




ArduinoAntロボットの回路図
Arduinoヘキサポッド用のPCBの設計
PCBの組み立て
Arduinoヘキサポッドコード
#include <Servo.h>
#include <SoftwareSerial.h>
#define trigPin 7
#define echoPin 6
#define ledB 10
SoftwareSerial Bluetooth(12, 9); // Arduino(RX, TX) - HC-05 Bluetooth (TX, RX)
// Create servo object
Servo s24;
Servo s23;
Servo s22;Code language: Arduino (arduino)void setup() {
Serial.begin(38400);
Bluetooth.begin(38400); // Default baud rate of the Bluetooth module
Bluetooth.setTimeout(1);
delay(20);
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
pinMode(ledB, OUTPUT);
// Head
s15.attach(36, 600, 2400);
s14.attach(35, 600, 2400);
s13.attach(34, 600, 2400); //grip
// Tail
s5.attach(26, 600, 2400); // Tail
// Leg 4
s10.attach(31, 600, 2400);
s11.attach(32, 600, 2400);
s12.attach(33, 600, 2400); //rot
// Leg 5
s7.attach(28, 600, 2400);
s8.attach(29, 600, 2400);
s9.attach(30, 600, 2400); //rot
// Leg 6
s1.attach(22, 600, 2400);
s2.attach(23, 600, 2400);
s3.attach(24, 600, 2400); //rot
// Leg 1
s18.attach(39, 600, 2400);
s17.attach(38, 600, 2400);
s16.attach(37, 600, 2400); //rot
// Leg 2
s21.attach(42, 600, 2400);
s20.attach(41, 600, 2400);
s19.attach(40, 600, 2400); //rot
// Leg 3
s24.attach(45, 600, 2400);
s23.attach(44, 600, 2400);
s22.attach(43, 600, 2400); //rotCode language: Arduino (arduino)// == Move to initial position
// Head
s15.write(72);
s14.write(50);
s13.write(90); // Grip
s5.write(65); // Tail
// Leg 4
s10.write(65);
s11.write(35);
s12.write(40);
// Leg 5
s7.write(80);
s8.write(50);
s9.write(25);
// Leg 6
s1.write(90);
s2.write(45);
s3.write(60);
// Leg 1
s18.write(60);
s17.write(90);
s16.write(100);
// Leg 2
s21.write(50);
s20.write(85);
s19.write(75);
// Leg 3
s24.write(50);
s23.write(80);
s22.write(80);Code language: Arduino (arduino)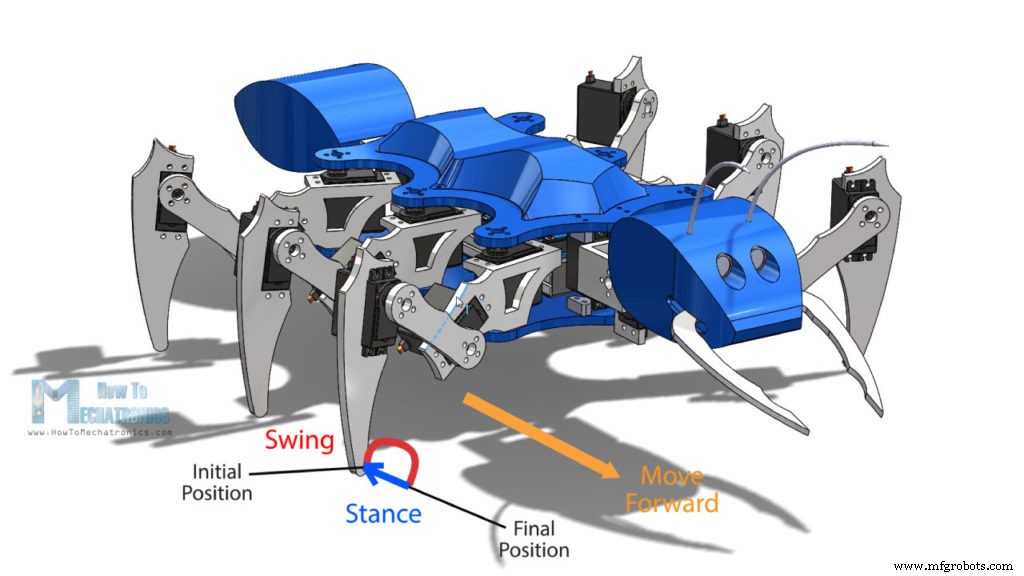
void moveLeg1() {
// Swign phase - move leg though air - from initial to final position
// Rise the leg
if (i1L1 <= 10) {
s18.write(60 - i1L1 * 2);
s17.write(90 - i1L1 * 3);
i1L1++;
}
// Rotate the leg
if (i2L1 <= 30) {
s16.write(100 - i2L1);
i2L1++;
}
// Move back to touch the ground
if (i2L1 > 20 & i3L1 <= 10) {
s18.write(40 + i3L1 * 2);
s17.write(60 + i3L1 * 3);
i3L1++;
}
// Stance phase - move leg while touching the ground
// Rotate back to initial position
if (i2L1 >= 30) {
s16.write(70 + i4L1);
i4L1++;
l1status = HIGH;
}
// Reset the counters for repeating the process
if (i4L1 >= 30) {
i1L1 = 0;
i2L1 = 0;
i3L1 = 0;
i4L1 = 0;
i5L1 = 0;
}
// Each iteration or step is executed in the main loop section where there is also a delay time for controlling the speed of movement
}Code language: Arduino (arduino)// Move forward
if (m == 2) {
moveLeg1();
moveLeg3();
moveLeg5();
if (l1status == HIGH) {
moveLeg2();
moveLeg4();
moveLeg6();
}
}Code language: Arduino (arduino)// Check for incoming data
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.read(); // Read the dataCode language: Arduino (arduino) Arduino AntRobotAndroidアプリ
// Monitor the battery voltage
int sensorValue = analogRead(A3);
float voltage = sensorValue * (5.00 / 1023.00) * 2.9; // Convert the reading values from 5v to suitable 12V i
Serial.println(voltage);
// If voltage is below 11V turn on the LED
if (voltage < 11) {
digitalWrite(ledB, HIGH);
}
else {
digitalWrite(ledB, LOW);
}Code language: Arduino (arduino)// Get the distance from the ultrasonic sensor
if (getDistance() > 40) {
att = 0;
}
if (getDistance() <= 40) {
att = 1;
dataIn = 99;
}Code language: Arduino (arduino)// If there is an object in front of the sensor prepare for attack
if (att == 1) {
prepareAttack();
if (aStatus == HIGH) {
while (a == 0) {
delay(2000);
a = 1;
}
if (getDistance() > 30) {
att = 2;
a = 0;
aStatus = LOW;
initialPosHead();
}
if (getDistance() < 30) {
att = 3;
a = 0;
aStatus = LOW;
initialPosHead();
}
}
}
// If there is no longer object in front, dismiss the attack
if (att == 2) {
dismissAttack();
if (aStatus == HIGH) {
dataIn = 0;
att = 0;
}
}
// If there is closer to the sensor attack
if (att == 3) {
attack();
if (attStatus == HIGH) {
while (aa == 0) {
delay(2000);
aa = 1;
} attStatus = LOW;
}
if (aStatus == HIGH) {
while (a == 0) {
delay(2000);
a = 1;
}
dataIn = 0;
att = 0;
initialPosHead();
}
}Code language: Arduino (arduino)
製造プロセス