


産業用ロボットをプログラムするための5つのヒント(そしてそれをさらに良くするための1つ)
ロボットインテグレーターには、数百台のロボットをプログラムした人と、初めてプログラムした人の2種類があります。冗談はさておき、それはユニークなスキルと分野です。才能のある人は、同僚の間で、さらには業界全体でさえも参照になることがよくありますが、その点に到達するには、狡猾な心と、実際に「仕事を成し遂げる」方法についてのオープンな視点の両方が必要です。
これらすべてを念頭に置いて、最初の産業用ロボットをプログラムする方法と、そのモーションプログラムとプロセスがどのようになるかを考えるための5つのヒントを紹介します。従来のアプローチからオフラインプログラミング、ハンドガイダンス、より簡単なコボットアプリケーションまで、今日利用可能なプログラミングのさまざまなオプションにより、仕事を成し遂げる方法を見つけるためにすべてがテーブルにあります。
ヒント1:ユースケースと制限を理解する
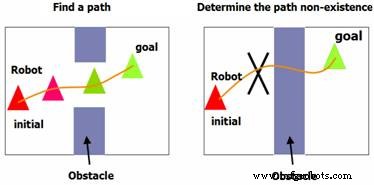
ロボットのプログラミングについて理解する最も重要なことは、「ポイントAとポイントB」です。ロボットは完全にプログラム的な存在であり、あなたのニーズについてすべてを理解するために地球上にいるわけではありません。あなたが言うとおりにロボットはここにいます。これは「あなたが望むものに注意する」というカテゴリーで提出することができます。
これは何を意味するのでしょうか?さて、ロボットが空間の特定のポイントに何度も到達し、プロセスを実行するために幅広い動きを採用したい場合は、各関節とモーターの機械的な制限に注意する必要があります。
>
同様に、ロボットに単純なプロセス(回路またはパネルの片側に接着剤を塗布するなど)を実行させたい場合は、ロボットが適切な速度で、残りの生産と協調して動くことを確認する必要があります。機械的限界をその精度が低下する可能性のあるポイントまで押し上げることなく。
ヒント2:「ハッピーパス」を定義する
ソフトウェア開発では、ハッピーパスはエラーや例外が発生しないデフォルトのシナリオです。これは無期限に繰り返すことができることを意味します。つまり、中断やメンテナンスなしで永遠に続く可能性があります。
ロボットは、産業シナリオで同じ機能を効果的に実行します。最小限のメンテナンスやダウンタイムで、24時間体制で何年も機能することができます。同時に、まったく驚きがない場合にのみそうすることができます。 処理している部品の位置に関しては。これを念頭に置いて、すべてのモーションが繰り返される場合、最もバランスの取れた再現可能なロボットモーションは、処理中のパーツが所定の位置にジグされているか、ライン上を移動しているかにかかわらず、均一または一貫した操作を可能にするパーツ位置に従ってプログラムする必要があります。
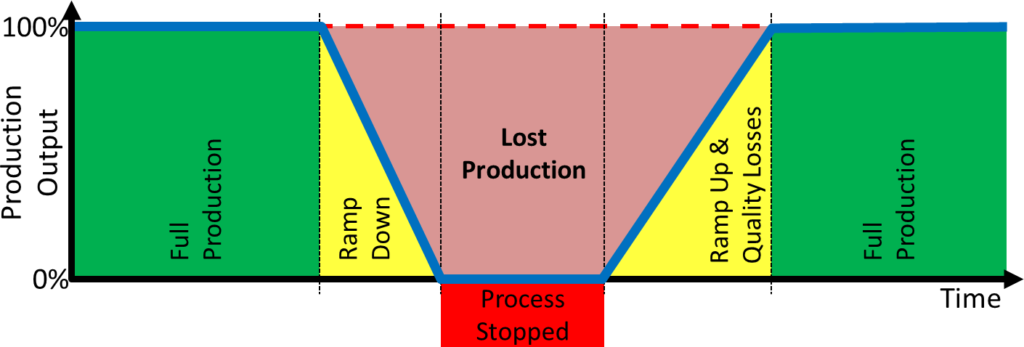
ヒント3:最悪の事態に備える
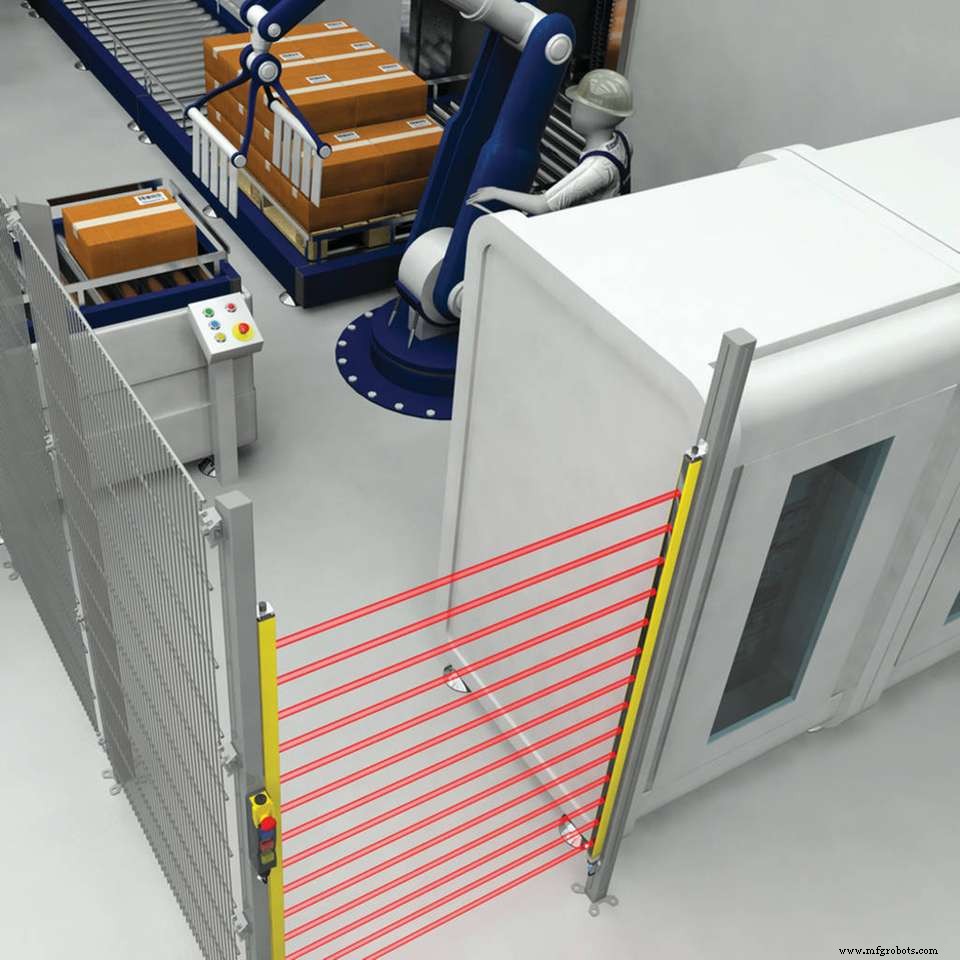
入力がいくつあっても、ロボットはその幸せな道から外れる可能性があります。置き忘れた部品、衝突可能な物体、衝突を引き起こすタイミングの悪い動き、または工場の床での人間の干渉。
そのため、最悪の事態を想像し、それに備える必要があります。ほとんどの産業用ロボットには、フル稼働時に使用できるケージまたは何らかの保護封じ込めメカニズムが付属しています。同時に、コボットには安全機能が組み込まれているため、衝突によって他の機器や人に重大な害を及ぼすことはありませんが、衝突によって動作が停止し、最終的にはダウンタイムや容量の浪費という形でコストがかかります。
そのことを念頭に置いて、アルフレッドヒッチコックの役割を果たし、特定の処理領域で発生する可能性のある最悪の事態を視覚化します。エントリポイントは何ですか?入国の事情は?誰が入ることができますか?彼らの知識レベルはどれくらいですか?
最悪の事態に備えるための最後のポイント:知識レベルに関係なく、ロボットはほんの数十年しか存在していません。人類の進化の文脈では、これは安全対策を省略できないことを意味します。賢い人でさえ愚かなことをする可能性があります。
ヒント4:床から離れることができる時間を確認する
プログラミングは、時間のかかる、完璧を要求するプロセスです。これは、常に予想よりも時間がかかることを意味します。そのため、実際の制作エリアでプログラミングプロセスにかかる時間を最小限に抑える必要があります。
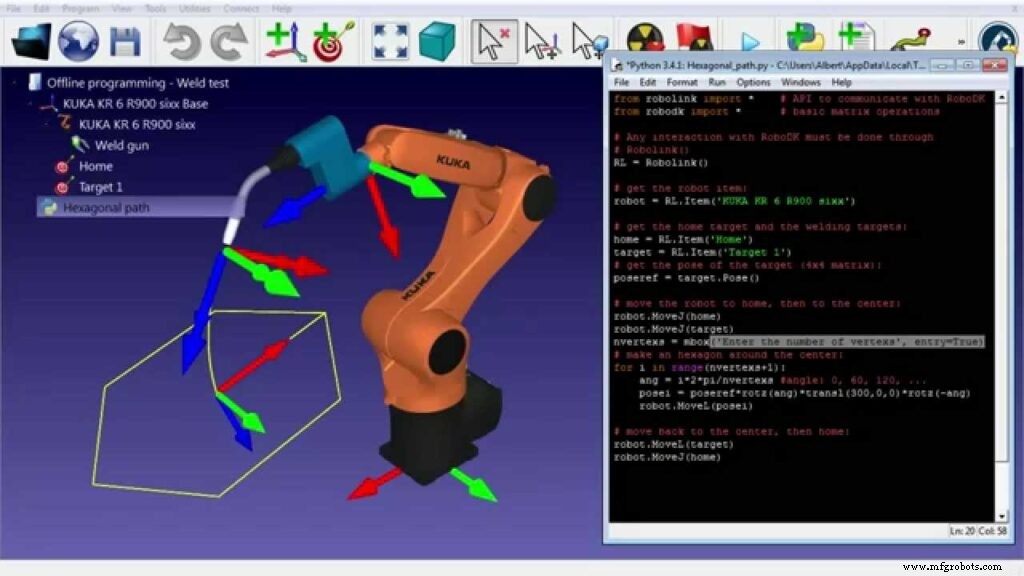
オフラインプログラミングソリューションは、ロボットプログラミングの最終的なコストを最小限に抑えるための優れた方法です。仮想環境で作業し、導入したさまざまなコマンドやシーケンスが実行されるのを確認することで、部品のCADファイルや、技術的または環境的な制限(衝突の可能性など)に基づいて、足を踏み入れることなくロボット操作を準備できます。最終的な本番環境。
もちろん、その環境でのレイアウトとマテリアルフローを理解し、オフラインで生成されたプログラムを実際のロボットセルでテストしてから、そのプログラムを本番環境に移行する必要があります。ただし、全体として、次のインストールの「学習曲線を短縮する」ために支払うのは少額です。
ヒント5:本番環境のループにとどまる
ロボットプロセスの場合、ロボットは何年も同じままですが、新しいエンドエフェクタは常により高い精度、帯域幅、または使いやすさを提供し、最終的にその特定の操作でロボットの寿命を延ばし、品質と一貫性をさらに向上させることができますまたは上記のプロセスの生産性。
ロボット工学に関しては、「水の端」にとどまらないことが重要です。ロボットはあらゆる種類の産業プロセスで役割を果たしますが、理解することが重要なのは、ロボットが完璧なソリューションであり、解決するよりも複雑さを増す可能性がある場所です。
付加価値のあるプロセスでは、ロボットをサポートする機器がどこで変更されるかを考慮することも重要です。たとえば、柔軟なジギングは、特定のロボット溶接アプリケーションを簡素化するのに役立ちます。特に、大きな箱型または管状の部品の場合はそうです。場合によっては、機器が単一タイプの形状に役立つ場所を理解する 長期的には生産性に多大なメリットがあります。
ボーナスのヒント:「プログラム」しないでください!
ロボットのプログラミングは一部の人にとっては情熱ですが、他の人にとっては、プログラミングが多すぎて楽しむことができない場合があります。このような状況でも、ロボットは引き続き役割を果たすことができます。
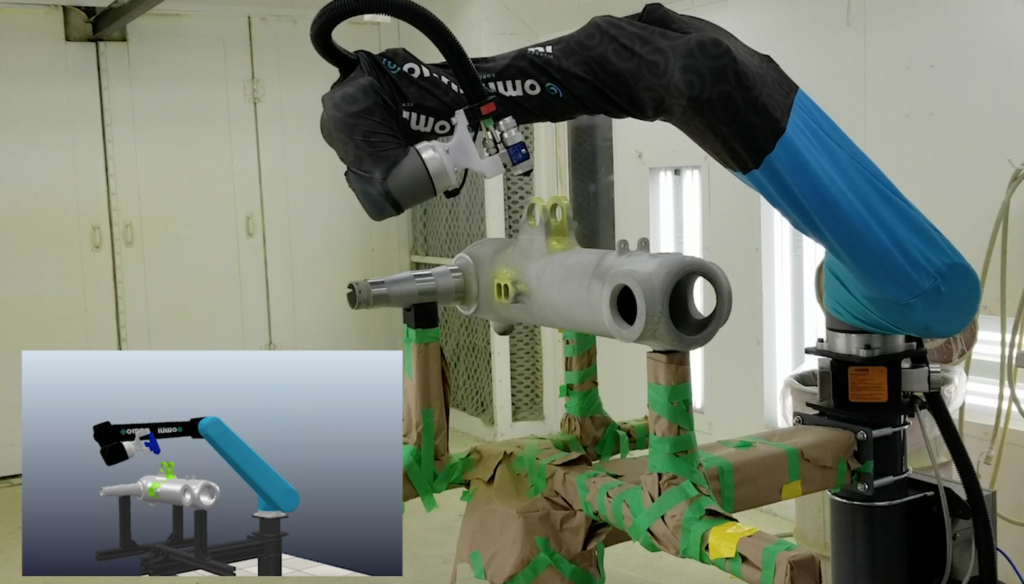
自律型製造ロボットは、次のいくつかの要素のみを使用してリアルタイムでロボットモーションを生成できるため、プログラミングの必要がありません。
- 部品のリアルタイムのセンサーベースの3D再構成
- ロボットプロセスセルのデジタルツイン
- パーツに指定されたプロセス目標
この機能があれば、プログラミングのことを忘れるだけでなく、部品のばらつきや治具の配置を気にすることなく、ロボットをハイミックス生産ラインに導入することができます。
セットアップが完了すると、プロセスは実質的にそれ自体を処理し、さらに、ロボットをプログラミングする必要がなく、プログラミングの時間、コスト、およびトラブルを発生させることなく、特定のわかりやすい命令を使用してプロセス出力を最適化できます。につながる。
これがヒントです!
オムニロボティック は、スプレープロセス用の自律型ロボット技術を提供し、産業用ロボットが部品を確認し、独自のモーションプログラムを計画し、重要な産業用コーティングおよび仕上げプロセスを実行できるようにします。 ここで、どのような見返りが得られるかを確認してください 。
産業用ロボット