


ロボットマニピュレータとは何ですか?ガイド
ロボットの各部分はすべて、その操作において役割を果たし、ロボットが使用できるタスクの種類を決定します。したがって、そのような部品を深く理解することは、適切な産業用ロボットを選択するための最初のステップになります。 あなたのニーズに合わせて。考慮すべき部分はたくさんありますが、おそらく重要な部分の1つから始めるのが有益でしょう。ロボットマニピュレーター。
ロボットは、特定のタスクを予測どおりに自動的に実行するようにプログラムされたマシンです。これを行うには、オブジェクトを処理し、それらを移動するか、溶接や穴あけなどのアクションを通じてオブジェクトに影響を与える必要があります。ロボット操作と呼ばれるのは、オブジェクトに対して実行されるこの処理または手順です。これにより、この定義により、ロボットマニピュレータを定義するためのコンテキストが得られます。
ロボットマニピュレータは、ロボットの本体に結合された腕のような構造であり、タスクを実行するために使用されます。マニピュレーターのないロボットは、手を後ろで縛ってタスクを実行する人に相当します。それは単に実行可能ではありません。実際、ロボットマニピュレーターがロボットアームとしても知られているのはこのためです。 出典:Kawasaki
ロボットマニピュレータは、内部構造に融合された一連のジョイントとリンクで構成されています。外側から、ロボットマニピュレーターアーム ロボットに取り付けられているようです。ただし、一連のジョイントとリンクは、それらをバインドするためにロボット本体にさらに入ります。これにより、ロボットとマニピュレータが協調した流体の動きで連携することが保証されます。
リンクは、ロボットのさまざまな部分をマージする剛性のあるコンポーネントです。それらの剛性は堅固な構造を提供しますが、作業中にロボット部品が動きにくくなります。その結果、柔軟性を促進するためにジョイントがリンクに追加されます。関節は、ロボット部品の直線運動、回転運動、または回転運動を促進するために互いにスライドする可動コンポーネントです。それらは、人間の肘や膝と同じように構築され、機能します。 出典:www。 brainkart.com
ロボットマニピュレータが持つ関節の種類と数によって、自由度、作業範囲の形状、および適用方法が決まります。これにより、ロボットがどのように分類されるかが決まります。説明のために、さまざまなタイプのロボットとそのロボットマニピュレータの構造を調べてみましょう。
直交ロボット- そのマニピュレータは、互いに垂直で線形のスライド運動のみを提供する3つのプリズムジョイントを使用してリンクされています。その結果、デカルトロボットは3軸ロボットに分類され、幾何学的な作業範囲があります。
ポーラーロボット- 極地ロボットの腕と体は、回転ジョイントを使用して結合されます。このタイプの関節は、極座標ロボットアームが極座標ジオメトリシステムの3軸内で移動できるようにする円運動を可能にします。
円筒形ロボット- 円筒形のロボットアームは、ベースの回転ジョイントと垂直軸に沿って移動できる線形ジョイントを使用して動作します。これらのジョイントのセットアップにより、マニピュレーターを伸ばしたり縮めたりすることができますが、その作業範囲はまだ小さな円筒形に制限されています。
スカラロボット –スカラロボットの関節は回転式であり、Z軸で剛性を保ちながら、XY軸に沿った動きを容易にします。関節が水平面であるため、スカラロボットは半円形の広い作業範囲を持っています。
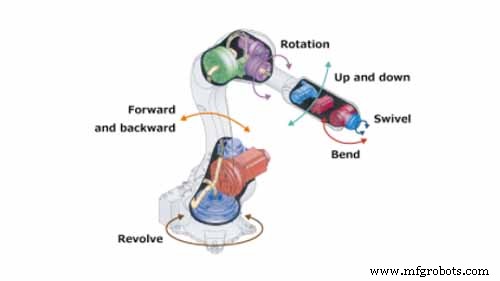
多関節ロボット – 多関節ロボットは、他のすべてのロボットの中で最も柔軟なマニピュレーターを備えています。ロボットマニピュレータアームは回転ジョイントでロボット本体にリンクされ、肘とアームの他の部分は回転ジョイントを使用してリンクされます。回転ジョイントにより、腕の回転、ピッチング、ヨーイングが可能になり、6軸ロボットが作成されます。
さまざまなロボットマニピュレーターの柔軟性を利用して、さまざまな業界のプロセスを自動化できます。このようなアプリケーションの例は次のとおりです。
ロボット手術- このアプリケーションでは、多関節ロボットマニピュレーターにエンドエフェクターとして手術器具が取り付けられています。それは外科医によって遠隔操作され、外科的操作を実行します。
ピックアンドプレース – これは、ロボットマニピュレータが商品の梱包などの繰り返しのピックアンドプレースタスクに適用される一般的な産業用アプリケーションです。
PCBアセンブリ – この例では、ロボットマニピュレーターが人間の作業員の手を置き換えて、PCBボード上にマイクロパーツを高精度かつ高速に組み立てます。
ロボット工学におけるロボットマニピュレータの意味は、単なる機能以上のものであると言っても過言ではありません。さらに、構造とロボットの適用方法を定義します。評判の良いロボットアームメーカーの高品質マニピュレーター したがって、ロボット工学に挑戦する人にとっては価値のある投資になるでしょう。
ロボット操作とは何ですか?

ロボットマニピュレータは何で構成されていますか?

結論
産業用ロボット