


ロボット工学における逆運動学:知っておくべきこと
逆運動学とは
ロボットを最大限に活用するには、ロボットについてどれだけ知っておく必要がありますか?
ロボット工学の逆運動学は巨大で、しばしば複雑なトピックです。プロジェクトによっては、プロジェクトについて詳しく知る必要がある場合や、基本的な知識が必要な場合があります。
ロボット工学の逆運動学について知っておくべき重要な情報は次のとおりです。
逆運動学とは?
インバース キネマティクスは、ロボットのエンド エフェクタを特定の位置と向き (「ポーズ」とも呼ばれます) に配置するために必要なジョイント位置を計算するために使用される数学的プロセスです。タスクを実行するロボットをプログラミングするには、信頼性の高い逆運動学ソリューションが必要です。
インバース キネマティクスとロボットのフォワード キネマティクスの違いを明確にすることが重要です。
フォワード キネマティクスは、ジョイントが特定の位置に設定されている場合のエンド エフェクタの位置を決定します。順運動方程式の解は常に 1 つだけです。ジョイントが特定の位置に設定されると、エンド エフェクタは常に同じ場所に配置されます。
逆運動学では、多くの場合、逆運動学の解を計算するための複数の異なる解と複数のアプローチがあります。
ロボティクスで逆運動学が必要な理由
インバース キネマティクスがなければ、ロボットのプログラミングは非常に困難でした…不可能ではないにしても.
ロボットのエンド エフェクタをワークスペース内の特定の場所に移動させたい場合、目的のポーズをプログラムに入力することは理にかなっています。
ただし、目的の X、Y、Z に移動するようにロボットに指示することはできません 調整し、ロボットがあなたの指示を理解することを期待します... 逆運動学なしではありません.
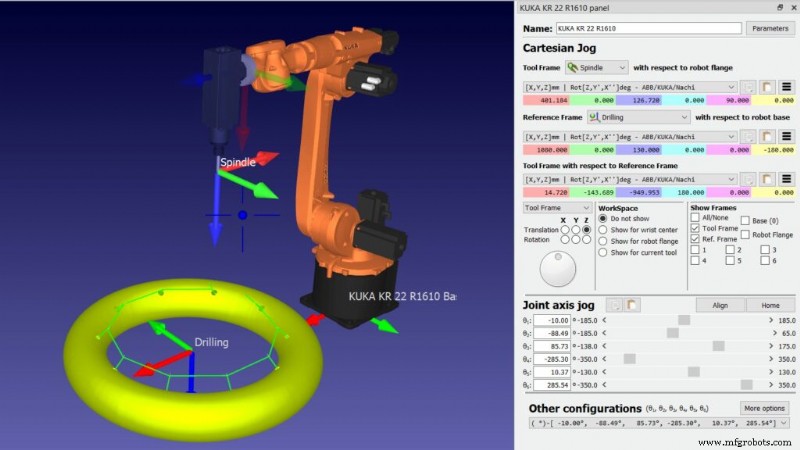
ほとんどの産業用ロボットは、独立して制御可能ないくつかの多関節ジョイントで構成されています。各ジョイントは、場合によっては複雑な構成で、1 つまたは複数の他のジョイントに接続されます。エンド エフェクタは、「キネマティック チェーン」全体の最後に取り付けられます。いずれか 1 つのジョイントを動かすと、エンド エフェクタのポーズにさまざまな方法で影響します。
これは、エンド エフェクタの位置と特定のジョイントとの間に単純で直接的な関係がないことを意味します。
たとえば、ロボットのエンド エフェクタを Z 軸に沿って 1 mm 直線的に移動させたい場合、すべてのジョイントを異なる量だけ移動する必要がある場合があります。
最後に、逆運動学アルゴリズムが、目的のエンド エフェクタ ポーズに到達するために必要なロボットの各関節の正確な位置を計算します。
ロボット アームの逆運動学を求める方法
ロボット工学の逆運動学について調べていると、多くの場合、方程式、公式、およびアルゴリズムの説明のページを見つけることができます。これは、逆運動学の計算がロボティクス研究で確立された分野であるためです。研究分野以外で逆運動学について話す人はあまりいません (3D アニメーターを除く)。
ただし、産業用アプリケーションにロボットを使用する場合、逆運動学ソリューションを見つけるための基本的なオプションが 2 つあります。
<オール>これらのどれを選択するかは、独自の状況によって異なります。
自分でロボットを構築した場合 (つまり、モーターと機械的リンクを接続してゼロから構築した場合) は、おそらくオプション 1 を選択する必要があります。
ロボット メーカーの産業用ロボットを使用している場合、ほとんどの場合、オプション 2 の方が速くて簡単です。
ハード メソッド:インバース キネマティクス ソルバーを作成する
独自の逆運動学ソルバーを作成する場合は、本格的なプログラミングの準備をしてください!
逆運動学の計算には 2 つの基本的なアプローチがあります:
1.解析逆運動学ソリューション
解析用インバース キネマティック ソルバーは、目的のエンド エフェクタ ポーズを取り、必要なジョイント位置を (ほぼ) すぐに吐き出すことができます。
これは、「ボンネットの下」で、ロボットのキネマティック チェーンが閉じた形式の表現に縮小されているためです。エンド エフェクタのポーズには、必要なジョイント位置の数学的な定義があります。
閉じた形式の式を自分で (手動で) 生成する作業を行うこともできますが、これは通常は必要ありません。最近では、IKFast ライブラリにより、このタスクが以前よりもはるかに簡単になります。
2.数値/反復キネマティクス ソルバー
すべてのロボットが解析的な逆運動学ソリューションを備えているわけではありません。ロボットの運動学的構造が複雑または異常な場合、唯一の選択肢は数値逆運動学ソルバーを使用することです。
また、数値解法では、明確な閉形式表現がありません。代わりに、希望するエンド エフェクターの位置を入力すると、反復アルゴリズムが最適化ソリューションとして処理することで、必要なジョイント位置のソリューションに向けて機能します。
各反復で、アルゴリズムはいくつかのジョイント位置をロボットの順運動学方程式に入力して、エンド エフェクターがどこに到達するかを見つけます。次の反復では、この情報を使用して、関節の位置をさらに微調整します。これにより、エンド エフェクタが目的のポーズに向かって徐々に移動します。
この反復的なアプローチにより、数値逆運動学ソリューションは解析ソリューションよりも遅くなります。
簡単な方法:実績のある逆運動学ソルバーを使用する
独自の逆運動学ソルバーを作成することは、大学にいるとき、または独自のロボットをゼロから構築している場合に、優れた知的訓練になります。
ただし、ロボットを本番環境で使用するだけの場合は、独自の逆運動学ソルバーを作成する必要はほとんどありません。
ロボット プログラミング環境に既に組み込まれている既存のソルバーを使用する方が、はるかに簡単で迅速です。
RoboDK のロボット ライブラリ内のすべてのロボットには、独自の逆運動学ソルバーが付属しています。これにより、何も考えずにすぐにプログラミングを開始できます。
ほとんどのソルバーは、ロボット ファイルにパッケージ化された、事前に生成された解析ソリューションです。ただし、ライブラリ内のより複雑なロボットの中には、数値ソルバーを使用するものもあります。数値ソルバーを使用しても、プログラムをロボット自体に送信する前にロボットをオフラインでプログラミングするため、RoboDK では計算速度の低下は問題になりません。
結局のところ、本当に必要な場合にのみ独自の逆運動学ソルバーを作成してください。
そうでない場合は、タスク用のロボット プログラムを作成し、それをより迅速に生産に投入することに多くの時間を費やすことができます。
ロボット工学における逆運動学について、どのような質問がありますか? 以下のコメントでお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションに参加してください。
産業用ロボット