


ワークスペースの視覚化で最適なロボットを決定する方法
ロボットを購入する前に、ロボットがタスクのスペースのニーズに合っているかどうかをどのように判断できますか?
すべての通常の仕様と指標によって選択を絞り込んだとしても、まだいくつかのしつこい疑問があるかもしれません.
ロボットが大きすぎて、使用可能なスペースに収まりませんか?
小型のロボットを使用すると、タスクに必要なすべての領域に到達できますか?
最も効率的になるようにロボットのサイズを最適化する方法はありますか?
特定のロボットを購入する前に、そのロボットが施設のそばにあるとどうなるかを判断するのは困難です。好きな YouTube ビデオをすべて見たり、すべてのデータシートを読んだり、他の人の施設にいる他のロボットを見たりすることもできます…
ロボットが特定のタスクにどのように適合するかを確認しないと、ちょっとした推測ゲームになってしまうことがあります。できる限り多くの計算を行い、あとは期待するだけです。
または、過度に保守的になり、大量の床面積を必要のないロボットに譲ることを選択します。
おそらく、製造用ロボットを選択するためのガイドを既に読んでいるでしょう。
必要なロボットのタイプ、エンド エフェクタ、アクセサリを特定しました。ペイロードと再現性に基づいて、選択肢をロボットの選択に絞り込みました。また、私たちのツールを使用して、多かれ少なかれ妥当と思われるリーチを選択しました。
しかし、各ロボットが占有するスペース全体を視覚化することはまだできていません.
ロボットが占めるスペースを想像するのが難しい理由
ロボットの問題は、ロボットが非常に動的であることです。
たとえば、CNC マシンを使用すると、トレード ショーでマシンに近づき、ワークフロアでどれだけのスペースを占有するかを正確に確認できます。マシンのフル サイズは簡単に計算できます — 基本的に大きな直方体です。
ロボットの場合、占めるスペースはそれほど単純ではありません。ロボット自体の物理的な寸法だけでなく、ロボットが移動しているときにロボットのエンド エフェクタが到達するすべての場所を含む拡張スペースも占有します。これは、ロボットの「ワークスペース」として知られています。
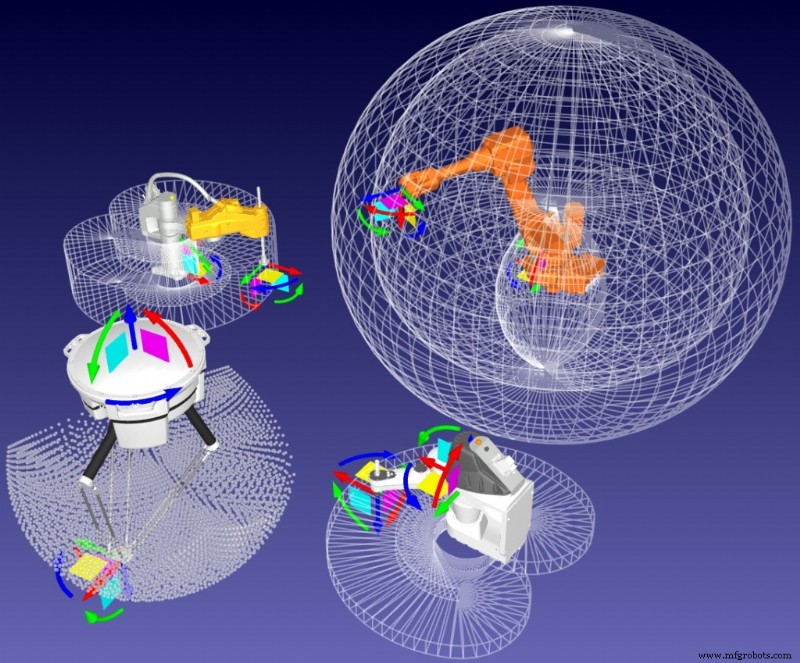
ほとんどの 6 DoF 産業用ロボットには、やや球体のようなワークスペースがあります。デルタ ロボットには、3 次元の円弧のように見える複雑なワークスペースがあります。スカラロボットは円筒形のワークスペースを持っています.
ロボットを見ただけでは、ワークスペースがどのようになるかを判断するのは困難です。

検討しているロボットがニーズに合った作業スペースを確保できるようにするにはどうすればよいですか?
ワークスペースの視覚化は、より良い意思決定に役立ちます
ありがたいことに、ロボットのワークスペースを簡単に確認して、特定のタスクにどのように影響するかを調べる方法があります。
購入するロボットを選択する前に、これを行うことができます。
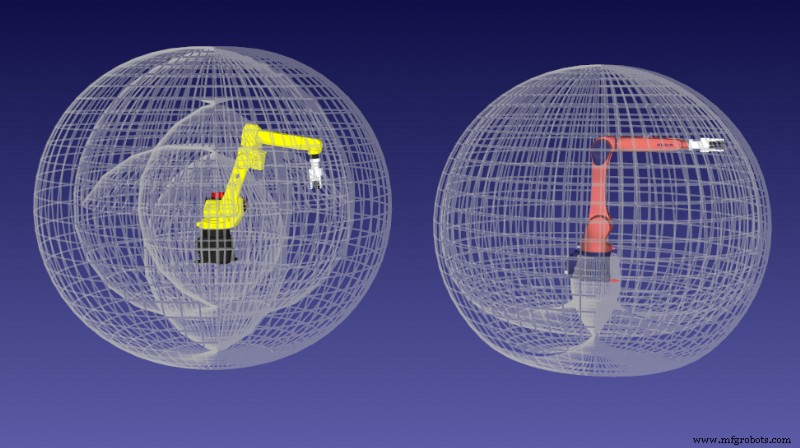
ワークスペースの視覚化は、ロボットのワークスペースの外側の境界を 3D 形状として視覚化できるツールです。 RoboDK では、このスペースはロボットのシミュレートされたモデルの周囲に配置されたグレーのアウトラインとして表示されます。
この機能を使用して、どのロボットが自分のタスクに最適かを判断できます。
アプリケーションの仮想モックアップを作成することで、さまざまなロボット モデルをすばやく切り替えて (タスク自体をプログラムする必要はありません)、ワークスペース ビジュアライゼーション機能を使用して、特定のロボットがニーズに最適なロボットであるかどうかを確認できます。
ワークスペースに基づいてタスクに適合するロボットを見つけたら、アプリケーションをシミュレーターにプログラムして、選択したロボットが実際にジョブを実行できることを確認します。
ワークスペースの視覚化の仕組み
ロボットのデータシートを見ると、通常、そのロボットのワークスペースの基本的な図が表示されます。通常、これはロボットの横からの 1 つのビューと上からの 1 つのビューで構成されます。
このような写真は役に立ちますが、十分ではありません。
ワークスペース ビジュアライゼーションは、基本的にこのような画像の 3D バージョンです。これは、ロボットのすべてのジョイントをすべての可能な位置にアルゴリズムで動かし、エンド エフェクタの結果の位置を 3D 形状にマッピングすることによって生成されます。
計算は 3D で行われるため、ロボットのデータシートだけを見た場合よりも、特定のロボットの機能についてより全体的な視点が得られます。
エンド エフェクタを追加することの影響
ロボットに加えた変更は、そのワークスペースにも影響を与えることがあります。たとえば、エンド エフェクタを追加すると、そのエンド エフェクタの寸法によってサイズが変更され、場合によってはワークスペースの形状も変更されます。 RoboDK では、ロボットのワークスペースをエンド エフェクタの有無にかかわらず表示することを選択できます。
ロボットにエンド エフェクターを追加するときはいつでも、ワークスペースの視覚化機能を使用して、ロボットのワークスペースにどのような影響を与えるかを確認することをお勧めします。
ワークスペース ビジュアライゼーションの使用を開始する方法
RoboDK を使用すると、ワークスペースの視覚化を非常に簡単に使用して、ロボットの購入決定に役立てることができます。
特定のロボットのワークスペースを表示する手順は次のとおりです:
<オール>もちろん、一度に 1 つのロボットのワークスペースを表示するだけに制限されているわけではありません。複数のロボットをシミュレーションにロードして、それらのワークスペースを並べて比較できます。
これは、2 つの異なるロボット モデルのどちらかを決定しようとしている場合に役立ちます。ただし、1 つのタスクで複数のロボットを使用していて、それらのワークスペースがどのように相互作用して重複するかを知りたい場合にも役立ちます。
ワークスペースの視覚化は、ロボットの導入にどのように役立ちますか?以下のコメントでお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションに参加してください。
産業用ロボット