


ロボットのサイクル タイム:時間を計算して最適化する方法
ロボット工学への投資を最大化するには、ロボットのサイクル タイムを最適化する必要があります。
時は金なり。ロボットは、1 日に多くのサイクルを実行します。ロボットの動きが不必要に遅い、または非効率的である場合、これは損失を意味する可能性があります。
ロボットのサイクル タイムを 2 秒短縮するだけでも、年間で何百時間もの作業時間を節約できます。
どのように計算しますか?
また、知らず知らずのうちにお金を失っていないことをどのように確認できますか?
ここに明確なガイドがあります。
ロボットのサイクル タイムとは?
ロボットのサイクル時間は、ロボットがプログラムされたタスクの 1 つの完全なサイクルを完了するのにかかる時間です。これには、付加価値のある時間 (ロボットが移動中または操作を実行している時間) と、付加価値のない待機時間の両方が含まれます。
調査によると、サイクル時間が短縮されると、ワークピースあたりのコストが削減されます。サイクル タイムが長くなればなるほど、製品の作成コストが高くなります。
ロボットは非常に一貫性があるため、サイクル時間はロボットの全体的な生産性に大きな影響を与えます。非効率性や無駄な時間は、サイクルごとに発生します。したがって、非効率性が倍増します。

時は金なり!サイクル タイムを最適化する必要性
ロボットのサイクルタイムを短縮することが重要なのはなぜですか?時は金なりだから!
毎週 5 日間、1 日あたり 1000 サイクルを実行するロボットがあるとします。サイクル タイムをわずか 2 秒短縮するだけで、1 日あたり 33 分の節約になります。これは、年間 144 時間の節約になります!
システム インテグレータの Adil Shafi 氏が言うように、サイクル タイムは「ロボティクスのビジネス ケースにおける最も重要な財務上の正当化の 1 つです。何かを高速化できる一瞬一瞬が、直接お金に変わります。」
たとえわずかであっても、ロボットのサイクル タイムを短縮する方法に常に注意を払う必要があります。時間の経過とともに、これは大きな節約になる可能性があります。
ロボットのサイクル タイムに影響する要因は?
さまざまな要因がロボットのサイクル タイムに影響します。これらのいくつかは、変更するためにあなたの管理下にあります。他の人はそうではありません。
影響する要因は次のとおりです。
- ロボット モデル
- コントローラのモデルと構成
- 実行しているタスクの詳細
- ロボットの速度と加速度
いくつかの要因は、物理ロボット間の微妙な違いに関連しています。そのため、ロボット シミュレーターで完全に正確なサイクル タイムを計算できるとは限りません。しかし、適切なツールを使えばかなり近づくことができます。
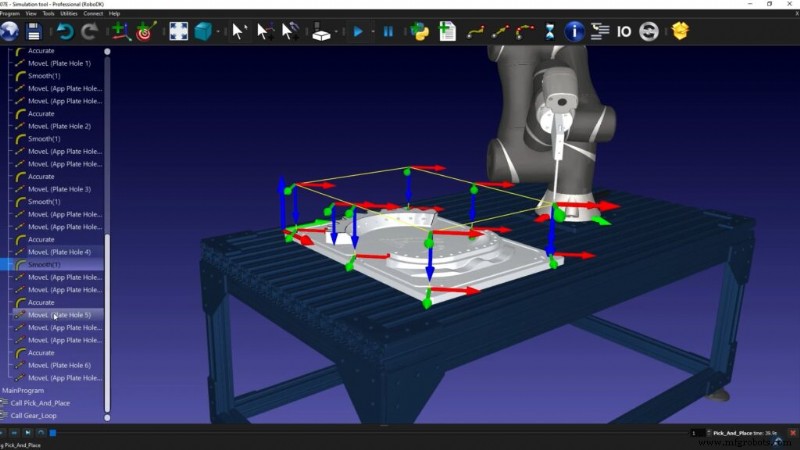
RoboDK でロボットのサイクル タイムを計算する方法
サイクル タイムを改善する前に、まず計算する必要があります。ここで、優れたロボット シミュレーターが役立ちます。
RoboDK には、ソフトウェアのコア機能としてサイクル時間の見積もりが含まれています。
RoboDK でサイクル時間を見積もる手順は次のとおりです。
<オール>シンプル!
RoboDK のサイクル時間の見積もりはどのくらい正確ですか?
上記の理由により、サイクルタイムの見積もりは完全に正確ではありません。物理的なロボットで達成される正確なサイクル タイムはわかりません。
私たちが実行したテストでは、物理的なロボットで同じタスクを実行する場合と比較して、サイクル タイムが約 95 ~ 99% の精度であることが一般的です。通常、ロボット タスクの最適化を開始するには、これで十分です。
シミュレーションが正確であるほど、サイクル時間の見積もりも正確になります。
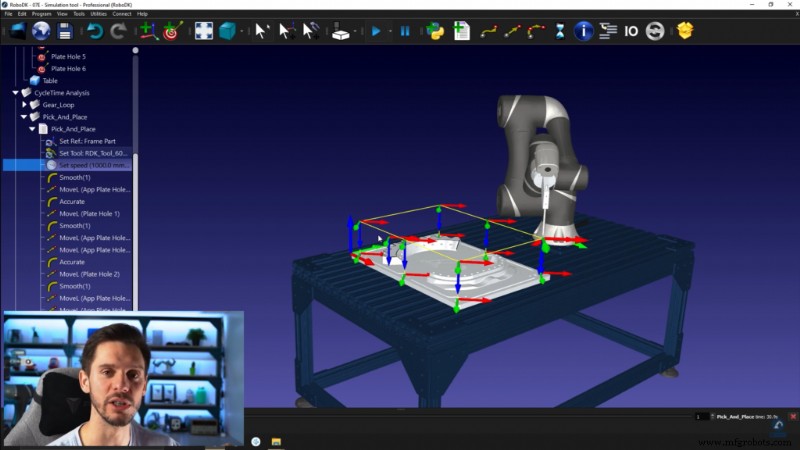
ボーナス ツール:詳細なサイクル タイム調査
RoboDK には追加のツールがあり、タスクのサイクル タイムに関する追加の有用な情報を提供します。
[ツール] メニューに移動して [スクリプトの実行] を選択すると、次の 3 つのツールが表示されます:
- CycleTimeStudy — これは、ロボットに最適な関節速度を選択するのに役立ちます。これにより、ロボットのさまざまな直線速度と関節速度を詳細に比較し、現在のプログラムでのそれぞれの推定サイクル タイムを得ることができます。
- CycleTimeDisplay — これにより、特定のロボット プログラムについて上記で計算された現在のロボットのサイクル タイムが表示されます。
- CycleTimeDisplayAll — これにより、現在のプロジェクト ツリー内のすべてのロボット プログラムのサイクル タイムの見積もりが表示されます。
ロボットのサイクル タイムを最適化する 3 つの賢い方法
ロボットのサイクル タイムがわかったところで、どのように最適化できますか?
サイクル タイムを最適化する 3 つの優れた方法を次に示します。
1.ロボットの動きに丸みを加える
ラウンディングは、ロボットをコーナーに行かず、わずかなカーブに沿って移動させることで、このストップスタートを減らす方法です。これにより、サイクル時間が短縮されます。非常に正確な動きを必要としないパスにのみ使用してください。
ロボットが動きの隅に移動するたびに、動きを停止して再開する必要があります。たとえば、ロボットが正方形のパスをたどる場合、ロボットは正方形の各コーナーで停止します。
2.ロボットの速度と加速を最適化
ロボットの速度と加速度には微妙なバランスがあります。これらのいずれか、または両方を変更すると、サイクル タイムに大きな影響を与える可能性があります。
速度と加速度は、ロボット モデルごとに異なります。さまざまな速度と加速度を試して、ロボットとタスクに最適な構成を見つけてください。
3.指標を追跡し、継続的に改善する
何かを最適化する最善の方法は、それを追跡し、時間をかけて継続的に改善することです。これには、適切な指標を選択する必要があります。
ロボット タスクを最適化する際に追跡する最初の指標は、「サイクル タイム」そのものです。ロボットのプログラムに加えた変更ごとに、サイクル タイムへの影響を書き留めます。時間の経過とともに、「1 日あたりのサイクル数」や「完了したサイクル数」などの指標を追跡することもできます。
ロボット サイクル タイムに関する無料トレーニングを見る
RoboDK の機能を使用して自分のロボット セルを改善する方法を見たいですか?
無料のビデオ トレーニングでさらに詳しく学ぶことができます。サイクルタイムのレッスンでは、最初から最後までのプロセスを学びます。
ここでサイクルタイムのレッスンを見ることができます。
まず、丸めに関するレッスンとロボットの加速に関するレッスンを最初に視聴することをお勧めします。
何か質問はありますか? 以下のコメント欄でお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションに参加してください。また、豊富なビデオ コレクションをチェックして、RoboDK YouTube チャンネルに登録してください
産業用ロボット