


民生用ポータブルで正確なモーショントラッキングを実現
私たちの生活は、ポータブルで接続されたガジェットによって変化しました。最も明白なのはスマートフォンですが、スマートウォッチ、フィットネストラッカー、ヒアラブルなど、他の多くのガジェットもあります。これらのデバイスは、処理能力とワイヤレス接続に裏打ちされたデータ収集を組み合わせています。
ただし、他のすべての機能の中でも、ガジェットをより機能的で直感的にするためのモーションセンサーの重要性を見落としがちです。スマートフォンの画面の向きを変更する場合でも、スマートウォッチで歩数を数える場合でも、頭の動きをXRメガネに合わせる場合でも、イヤフォンをタップして曲を変更する場合でも、モーションセンシングはユーザーエクスペリエンスとインターフェースの重要な部分です。
組み込みエンジニアにとって、モーションセンサーの選択と統合は難しい場合があります。コストや消費電力を不必要に増やすことなく、必要な精度を得るために適切なテクノロジーを確実に選択するにはどうすればよいでしょうか。また、センサーを最大限に活用し、最終製品を改善する可能性のあるパフォーマンスや機能を見逃さないようにするには、どうすればよいでしょうか。
モーションセンサーの基礎
まず、モーションセンサーの意味を簡単に要約します。一般的に使用されるのは、加速度計、ジャイロスコープ、磁力計の3種類です。
加速度計は加速度を測定します。これには、重力による加速度が含まれる場合があります。これは、センサーに対する重力の方向を感知できることを意味します–基本的に、どちらが上か。ジャイロスコープは、角速度を測定することにより、角位置の変化を測定します。
加速度計とジャイロスコープのそれぞれに3つの自由度、つまり軸があり、両方を組み合わせると、6軸のモーションセンサーまたは慣性測定ユニット(IMU)が得られます(図1を参照)。多くのアプリケーションでは、地球の磁場の強さと方向を測定する磁力計を追加する必要があります。これにより、方位を推定できます。加速度計とジャイロスコープの上に3軸磁力計を追加すると、9軸IMUが作成されます。
この投稿の目的のために、IMUについて説明します。加速度計、ジャイロスコープ、または磁力計に単独で適用できる特定のプロパティについて説明しますが、これらのセンサーの少なくとも2つを組み合わせるという課題は、私たちが照らしたいものです。
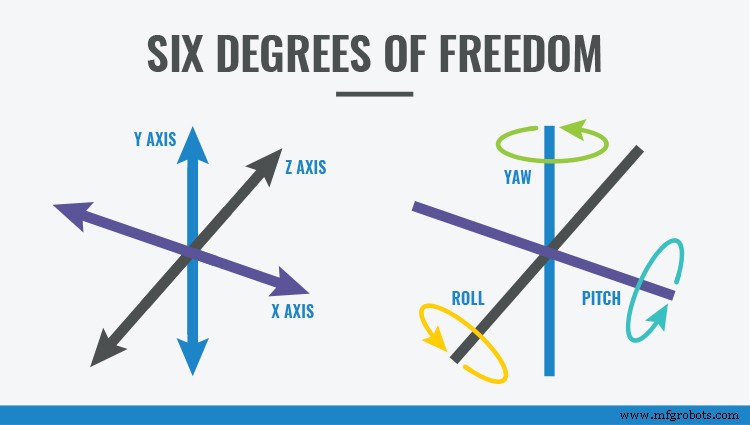
図1:IMUを使用したモーションセンシング(出典:CEVA)
正確に保つ
では、理論を思い出しましたが、実際にはどのように機能するのでしょうか。どうすれば必要な精度を得ることができますか?
IMUの場合、デバイスの方位を決定する際に達成される精度は、開始できる基本的な指標です。私たちの要件は1〜2度以内である可能性がありますが、別のアプリケーションでは精度が低くなる可能性があります。たとえば、XRヘッドセットの精度要件は、子供のロボット玩具の精度要件よりもはるかに厳しくなります。次に、このデータの安定性と、時間の経過や温度によって変化するかどうかを検討する必要があります。
IMUから最高の精度の出力を得るには、センサーフュージョンを使用する必要があります。これは、複数のセンサーからのデータを組み合わせて、そのパーツよりも大きい合計を作成するという概念です。 IMUの各センサーには、さまざまな長所と短所があり、融合できます。 その解決策のために一緒に。
センサーフュージョンについて考える1つの方法は、「信頼」に基づいて行うことです。この場合、「信頼」を使用して、特定のセンサーからのデータがその精度と関連性について妥当なレベルの信頼性を持っていることを意味できます。あなたが国の大統領であり、政策を決定しなければならないとしましょう。あなたには経済、健康、軍事の顧問がいます。それぞれがあなたにインプットを与えます、しかしそれらはすべて異なる領域を知っています。彼らは自分の意見が相手にどのように影響するかについて推測していますが、残念ながら彼らは推測にすぎません。彼らの情報を処理して融合し、最良の決定を下すのはあなた次第です。
同様に、IMUからの方向データを求めることができる2つまたは3つの「アドバイザー」がいます。加速度計、ジャイロスコープ、場合によっては磁力計です。ジャイロスコープは説明するのが最も簡単なものです。民生用ジャイロスコープは、数秒という短期間での相対的な向きの変化を信頼できますが、出力は数十秒以上の長い時間間隔でドリフトします。加速度計は重力を長期間測定するのに役立ちますが、車の一定の加速度など、特定のシナリオでは混乱する可能性があります。田園地帯や森のような安定した磁気環境では磁力計を信頼できますが、鋼製の柱で建てられたオフィス内など、磁気干渉がある場合はそれほど信頼できません。
要するに、ジャイロスコープは短期間の測定には正確であり、加速度計と磁力計は長期の測定には正確です。それらの制限を注意深く理解することで、それらのデータを融合して、デバイスの向きをより正確に把握することができます。
9軸IMUなど、複数のセンサー出力がある場合、センサーフュージョンにより、データを組み合わせて比較し、精度を向上させることができます。たとえば、センサーフュージョンソフトウェアに、磁気干渉による磁力計の出力の予期しないまたは突然の変化を検出するアルゴリズムが含まれている場合、磁力計が再び安定するまで、加速度計とジャイロスコープのデータの信頼性を自動的に高めることができます。
>サンプルレートも精度にとって重要です。選択したセンサーは、ニーズを満たすのに十分な頻度でデータを提供しますか?もちろん、これはアプリケーションによって異なります。たとえば、基本的なステップカウンターでは、1秒あたり数回の読み取りで十分な場合がありますが、ほとんどのアプリケーションでは100Hz〜400Hzが推奨されます。ただし、XRアプリケーションで正確なヘッドトラッキングを行うには、1kHz以上のサンプルレートが必要になる場合があります(XRは、仮想現実、混合現実、拡張現実の総称です)。待ち時間を短くするには、サンプルレートを速くすることも重要です。これは、ヘッドトラッキングの例では、没入型VR体験と気分が悪くなることの違いです。
キャリブレーションも考慮する必要があります。多くのセンサーは「現状有姿」で提供されており、データシートに記載されている内容よりもわずかに多くなっています。実行できるあらゆる種類のキャリブレーションは、異なる個々のセンサー間で一貫したパフォーマンスを最大化するのに役立ちます。工場でのキャリブレーションは、個々のパフォーマンスを向上させる強力な方法ですが、比較的費用がかかります。現場での動的キャリブレーションは、センサー自体、または少なくともアプリケーションについての詳細な理解を必要とするもう1つのオプションです。センサーにはバイアスがあり、これを考慮しないと、出力全体に悪影響を及ぼし、既存のエラーを悪化させる可能性があります。
最後に、取得して融合したセンサーデータを検証する方法を検討する必要があります。これは追跡対象によって異なりますが、基本的な原則は、別の独立した情報源を使用して、出力を確認できる真実を提供することです。たとえば、ロボットアームを非常に正確に既知のポイントに繰り返し移動して、センサーが同じ位置データを提供するかどうかを確認できます。エラーを検出した場合、計算でそれを補うことができる場合があります。または、さらに注意が必要なエラーとしてフラグを立てる必要がある場合があります。
新機能の有効化
モーションを高精度で測定できるようになると、既存のアプリケーションに役立つだけでなく、ポータブルデバイスの新機能の可能性を開くことができます。たとえば、ヒアラブル(図2)の場合、従来のユーザーインターフェースには問題があります。ユーザーは、スマートフォンを引き出して制御することに専念したくないし、ヒアラブル自体が小さすぎて便利なボタンがありません。代わりに、ヒアラブルをタップして曲をスキップし、耳からそれらを取り出す動きを検出して、すべてのオーディオをミュートすることができます。これは、とにかく音を止めたい場合に発生する可能性があります。さまざまな動きを識別するアルゴリズムであるモーションと「分類子」を使用すると、より便利で直感的なユーザーエクスペリエンスが実現します。

図2:ヒアラブル(出典:CEVA)
モーションセンサーからの正確な情報は、ポータブルデバイスがあなたの周りで何が起こっているのか、またはあなたがどのような活動をしているのかをよりよく理解していることを意味する場合もあります。これはコンテキストアウェアネスと呼ばれ、より没入感のある体験を提供するために使用できます。近くの救急車からサイレンが聞こえるように、歩行者専用道路の交差点まで歩いたことが聞こえたときに音楽の音量を下げるように。
フィットネス追跡アプリケーションの場合、精度を上げると、さまざまなユーザーアクティビティを区別できます。たとえば、ステップトラッカーが動きのサイズ、速度、またはその他の特性を測定できる場合、通常の歩行、または階段の上り下りのどちらでもうまくいく可能性があります。ソフトウェアは、気圧やGPSから得られた位置など、他のセンサーデータと組み合わせて、動きの詳細な画像を作成し、消費カロリーを推定できます。
まとめ:センサーフュージョンとソフトウェア
すでに説明したように、モーションデータの精度と有用性を最大化するには、生のデータフィードを作成するだけでは不十分です。デバイスは、データを処理し、体系的な不正確さを補正し、複数のセンサーからの情報を組み合わせる必要があります。
ここで理解することはたくさんあります。センサーフュージョンは 複雑で、小さなパッケージで最高の結果を達成するために特定のノウハウが必要です。ただし、必要なセンサーと処理を統合するさまざまな製品が利用可能です。たとえば、BoschとCEVA HillcrestLabsのパートナーシップによって開発されたBNO080 / 085には、高性能の加速度計、磁力計、ジャイロスコープ、および低-パワー32ビットARMCortex M0 + MCU。
BNO085で事前にプログラムされたHillcrestLabsのMotionEngine™センサーハブソフトウェアは、6軸および9軸のモーショントラッキングに加えて、ウォーキング、ランニング、スタンディングなどのユーザーアクティビティの分類などのインテリジェント機能を提供します(図3)。 MotionEngineセンサーハブは、主要な組み込み処理アーキテクチャおよびオペレーティングシステムと互換性があり、ヒアラブル、スマートTV、ロボティクス、モバイルコンピューティング、リモートコントロール、低電力モバイルアプリケーションなどに特化したバージョンを利用できます。
クリックしてフルサイズの画像を表示
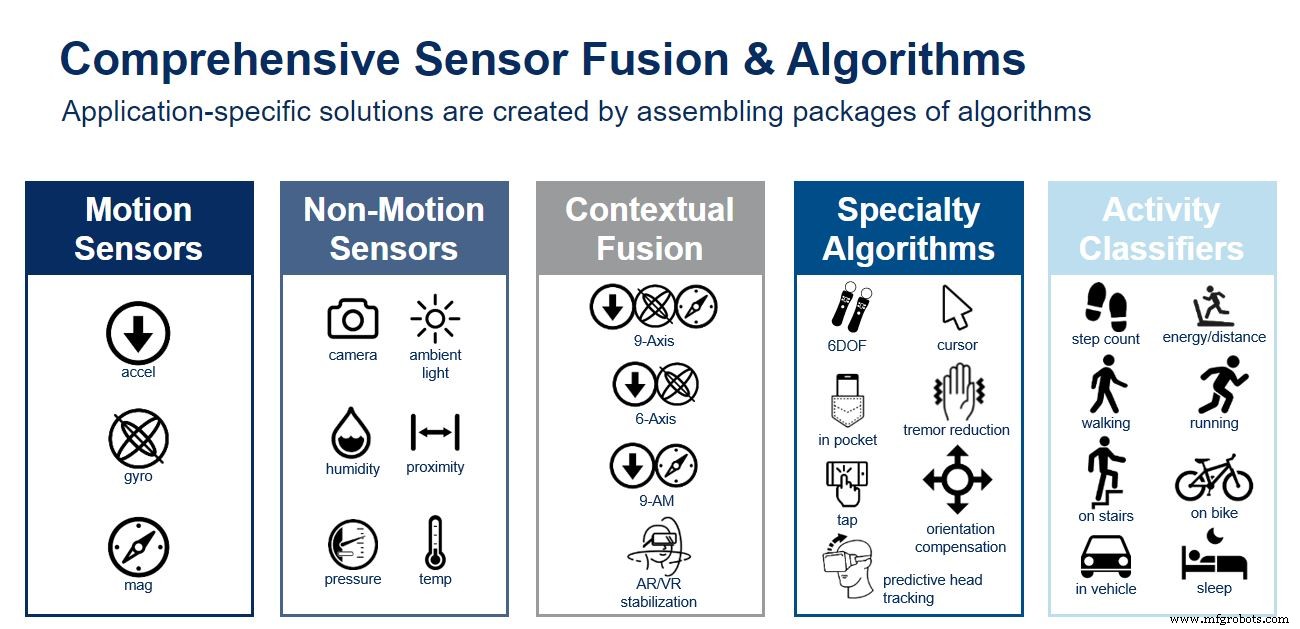
図3:包括的なセンサーフュージョンとアルゴリズム(出典:CEVA)
このすべてのデータをリアルタイムでまとめるのは困難な場合があり、重要な量の処理パフォーマンスが必要になります。これらの雑用をメインのアプリケーションプロセッサに要求するのではなく、センサーデバイス自体のMCUコアでこれらのアルゴリズムの一部を実行する統合センサーを選択するのが最善の場合があります。特に、歩数カウントなどの「常時オン」のタスクでは、動きが検出されるたびにメインプロセッサがウェイクアップするのを回避できれば、メインプロセッサをスリープモードのままにして、全体的な消費電力を削減し、バッテリ寿命を延ばすことができます。以前の例えに戻ると、センサーフュージョンに焦点を当てたSiPは、副社長に特定の決定を処理させ、メインプロセッサである社長がより緊急のタスクに集中できるようにするようなものです。
結論
モーションセンサーは多くのアプリケーションで重要な役割を果たしますが、適切なデバイスを選択する方法、アプリケーションに必要な精度を達成する方法、さらには必要な精度さえも常に明らかであるとは限りません。ユースケースが異なれば、必要な精度のレベルも異なり、必要なデータの種類に対する要件も異なります。
統合されたセンサーとセンサーフュージョンは、多くの場合、この問題の解決策を提供できます。適切なベンダーと協力することで、コストと消費電力を最小限に抑えながら、正確で信頼性の高いデータと、特定のアプリケーション向けの付加価値機能を妥協することなく取得できます。
埋め込み