


アプローチは無人エージェントを自給自足にします
研究者は、回転翼無人航空機(UAV)がGPSを使用せずに移動中の無人地上車両(UGV)に着陸し、移動する前に再充電できるようにするアプローチを開発しました。自律的な空中および地上のエージェントのチームは、人間にとって遠すぎるまたは危険な捜索救助環境での運用を可能にしますが、多くの場合、広範な測位および通信インフラストラクチャを必要とします。
UAVの重要な機能は、静止および移動する地上車両に自律的に着陸し、再充電してから離陸して新しいミッションを実行することです。 UAVはGPSが簡単に破壊されるため、GPSに依存できなくなります。そのため、これらの動作は、オンボードビジョンなどの他のソースを使用して実行する必要があります。
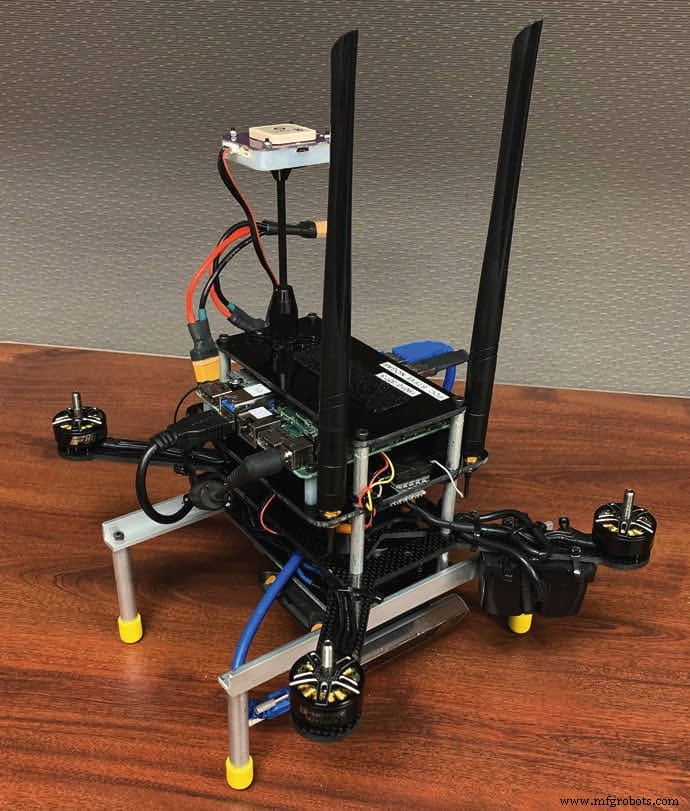
研究者は、低コストのセンサーとコンピューターを使用して、車内で計算を実行しました。また、UAVとUGVの間で通信は発生しませんでした。チームは、ソフトウェアインザループシミュレーションと屋外実験の両方を実施し、着陸操作の実行に効果的なアルゴリズムを実証しました。小型の特注クワッドローターとジョギング速度のUGVを使用して、研究者は着陸を実験しました。
この作業は、GPSで拒否された動作と実験的に証明された動作を組み合わせたものです。これは、視覚慣性オドメトリ、このアプリケーション用に設計された地上車両の上部にある独自のマーカー、および機内の動作と制御を備えた視覚ベースのローカリゼーションを使用します。さらに、これらの動作は、計算上の大きな制約がある小さなUASで実行されました。
地上車両の上部にあるカスタムマーカーは、着陸作業用に特別に設計されています。大きなマーカー内に小さなマーカーが含まれており、カメラがマーカーに近づいても表示できます。このアプローチにより、地上車両の上部にある基準マーカーへの依存を減らし、着陸したい車両を認識する人工知能に置き換えることができます。
センサー