


自動化の擁護者は、米国での目を見張るような統合の問題と闘っています。
プロジェクトは、ロボットやその他の工場コンポーネント間の通信を橋渡しすることを目的としています
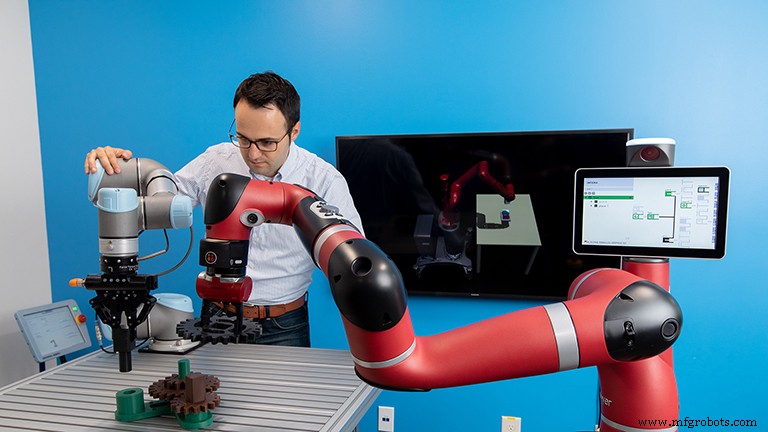
通訳を使用してお互いを理解する国連の国際代表のように、さまざまなベンダーのロボット、機械、およびその他の産業用コンポーネントは、異なるコンピューター言語を話し、コミュニケーションを支援するために翻訳者を必要とします。
主に経済的な理由から、工作機械、ロボット、コンベアなどを製造する企業は、独自のソフトウェアを使用して、相互の操作と通信、およびセンサー、ドライバー、PLC などのコンポーネントとの通信を行っています。機械メーカーは、工場の購買部門がトータル ソリューションのブランドに固執して、より多くの収益を生み出すことを望んでいます。
Southwest Research の ROS-Industrial (ROS-I) Consortium Americas のプログラム マネージャーである Matthew Robinson 氏は、次のように述べています。研究所。 「私が工作機械を提供しているのであれば、顧客に私のすべての製品を使ってもらいたいと思います。私のソフトウェア、ハードウェア、およびそれらに関連する相互接続された技術です。」
工場の所有者が別のブランドに切り替えることを決定すると、コミュニケーションの問題が発生し、生産と品質を向上させる統合、シミュレーション、および分析が妨げられます。
これまで、プラント内のすべてのテクノロジー間の通信を可能にするタスクは、コンピュータ コード トランスレータ、つまり 3D カメラからロボット、または異なるベンダー製の 2 台のロボット間のブリッジを作成するシステム インテグレータに大きく委ねられていました。 .これは、長い時間と多額の費用がかかるプロセスです。エンジニアリング接続の価格がマシン自体の価格を超えることもあります。
「エンジニアリングには非常に時間がかかり、コストがかかるため、多くの企業が自動化の道に進みません」と、Siemens Technology の Advanced Manufacturing Automation の研究グループの責任者である Juan Aparicio は述べています。 「彼らには自動化を正当化できる大きな予算がないため、意味がありません。」
共通基準への動き
このシナリオは、大規模な問題につながりました。統合に伴う時間と費用が、多くのショップでの自動化の採用を妨げており、アメリカの産業の進歩を妨げています.
製造業者と、Robinson、Aparicio などの希望に満ちた統合の問題解決者が経験していることは、別の製造分野で先例となっています。
約 30 年前の半導体業界では、異なるベンダーのエッチング リソグラフィ マシンなどのウェーハ処理装置も互いに通信できませんでした。その場合の差し迫った萎縮に対抗するために、半導体メーカーはコンソーシアムを形成し、ベンダーに共通の標準を作成する必要があると伝えました.まさにその通りです。
「問題は、『顧客からの要求は、[現在] 共通の標準の作成を推進するのに十分な力があるか?」ということです。これは、レンセラー工科大学の電気、コンピューター、およびシステム エンジニアリングの責任者であるジョン ウェン (John Wen) によるものです。 「まだ様子が見えませんが、その方向への動きがあるようです。」
Wen はまた、工場のデバイスが相互に通信できるように機械語を翻訳して共通化に向けた現在の取り組みに取り組んでいるメンバーの 1 人でもあります。
彼らの研究は、米国製造業の一部である Advanced Robotics for Manufacturing (ARM) Institute によって資金提供されています。 ARM インスティテュートが資金を提供するプロジェクトには、特定のミドルウェア (1 つは学界からのもの、もう 1 つは資金力のある起業家である Scott Hassan からのもの) の開発が含まれており、ミドルウェアのオプションを一般的な産業用途に使用できるようにし、実用的なコミュニケーションで工場を活気づけるのに役立ちます。 .
1 つのプラグアンドプレイ ソリューション
Wen は、「Robot Raconteur (RR):ロボット工学のための相互運用可能なミドルウェア」というタイトルのプロジェクトを率いています。 RR はデータを収集し、カメラの操作などの機能を呼び出します。
Wen の調査提案によると、「Robot Raconteur … は、自動化/ロボティクス システムに真のプラグアンドプレイ相互運用機能を提供するように特別に設計された、高度で拡張されたオブジェクト指向のミドルウェア テクノロジーです」。
RR はすでに汎用性があります。Linux、Windows、OSX、iOS、Android、OpenBSD、QNX、Arduino、および xPC ターゲット オペレーティング システムと互換性があります。 C++、Python、C#、Java、MATLAB、LabView、ブラウザ JavaScript、xPC ターゲット用のライブラリがあります。
Raconteur ミドルウェアは、Wen の Rensselaer ラボで John Wason によって開発されました。博士号を取得した後、Wason はミドルウェアに特化した自分の会社、Wason Technology をスピンオフしました。ワソンは、サウスウェスト研究所とユナイテッド テクノロジー コーポレーションと同様に、ARM 研究所が資金提供するレンセラーとの研究に参加しています。
それまでの間、産業用ロボットのユーザーは、今でもティーチ アンド リピート プロセスに依存して作業を行っています。
教えて繰り返すパラダイムから抜け出すための鍵は、視覚、3D、レーザー スキャン、近接、触覚、または力のいずれであっても、センサーを使用することです、と Wen は言いました。
ただし、センサーをロボットに統合してプログラミングすると、複雑さが増します。追加コストがかかります。また、センサーが壊れる可能性があります。壊れるものが多ければ多いほど、ラインがダウンする可能性が高くなり、プラントの費用がかかります。
Wen の解決策は、RR をオープンソースのプラグアンドプレイ システムに発展させることです。これにより、複数のベンダーやプラットフォームからのロボット、センサー、周辺機器、シミュレーション ソフトウェアのプログラミングと統合が簡単、迅速、かつ安全になります。
また、Azure Kinect や Intel RealSense 3D カメラなどの低コストの消費者向け製品を含む、より幅広いセンサーの使用への扉が開かれると Wen 氏は述べています。
「お好きな言語でプログラミング」
Southwest Research Institute での Robinson の仕事に固有のものは、ROS-I を使用して促進することです。ROS-I は、さまざまなデバイスのセットを接続できるという意味で RR に似た別のオープンソース ミドルウェアですが、視覚化とシミュレーションも容易にします。
彼は、唯一無二のソリューションを推進するベンダーのサイロ化されたパラダイムが、そもそもコネクティビティの分野で製造業に問題を引き起こした原因であることを知っています。
そのため、Robinson は長所と短所を比較検討し、IoT の特定の領域におけるその基盤である ROS (ロボット オペレーティング システム) のマイナス面について率直に述べています。
「ROS の大きな欠点の 1 つは、急速に進化し、更新されているコンピューター言語である C++ が多いことです」と彼は言いました。 「新参者にとっては、威圧的であり、あらゆる種類の問題を抱えている可能性があります。そのため、システムを機能させたいだけの業界関係者を、あらゆる種類の深くハードコアな C++ コンピューター サイエンス ソフトウェアの記述から解放するためのエンティティとツールが多数あります。
「RR は、参入障壁を下げることを目指しています。」
Aparicio は、コンピューター言語の多様性のもう 1 つの支持者です。
「製造業の言語が 1 つだけになると言うのは非現実的だと思いますが、いくつかの言語が存在する場合は、すべて長所と短所がありますが、インタープリターとして機能するソフトウェアの形でゲートウェイが必要です」と彼は言いました。
Aparicio は、自動化システム、シミュレーター、クラウド プラットフォーム、およびロボット (ROS-I によって制御される) 間の相互運用性と通信のためのプラグアンドプレイのオープンソース ソフトウェアを作成する、ARM Institute が資金提供するプロジェクトの主任研究者です。
このゲートウェイは、製造で広く使用されている 3 つの標準とプロトコル (OPC-UA、MTConnect、DDS) で動作します。
このプロジェクトで Siemens と Southwest Research Institute に加わるのは、ソフトウェア会社の Real Time Innovations と、ロボット ベンダーの Keba と Yaskawa です。
「最終的に、秘密のソースは、これらすべてのマシンが相互に通信できるようにする方法をいかに簡単に実現できるかということです。相互運用し、これらすべての低レベル通信を抽象化して、選択した言語でプログラミングできるようにします。」と Aparicio 氏は述べています。
レガシーマシンも話せますか?
新しい工作機械と工場のデバイスには、すぐに使用できる接続性と相互運用性が備わっており、その所有者は Aparicio、Wen、Robinson が行っている作業を確実に活用できるはずです。
しかし、レガシー マシンはどうでしょうか?
「一般的に、ネットワーク カードが搭載されていて、従来のインターネットを介した情報の移動をサポートできれば、問題ありません」と Robinson 氏は述べています。
10 年ほど前の一部のレガシー ロボットでさえ、工場の倉庫でほこりを集める代わりに、稼働させることができるかもしれません。
「10 年前のようなロボットを使用している場合、その時点では基本的に無料の資産であるため、いくつかのセンサーを追加し、いくつかのソフトウェアを活用しているだけです」と Robinson 氏は言います。 「優れた社内チームがない限り、契約パートナーと協力する必要があるかもしれませんが、まったく新しいシステムをゼロから購入するよりもはるかに低い [コスト] で稼働させることができます。
「その投資収益率は非常に説得力のあるものになります。」
コーダーの仕事に終わりはない
ARM インスティテュートが資金を提供するプロジェクトにすべての専門知識と努力が注がれ、その成果が成功したとしても、米国の製造業が相互運用性と接続性の可能性を最大限に発揮できるようにするために、やるべきことはまだたくさんあります。
さらに多くの参加者を受け入れる余地もあります。
「これは、知れば知るほど良いプロジェクトです。ますます多くの企業を参加させたいと考えています」と Aparicio 氏は述べています。 「問題を完全に解決しているわけではありません。小さな障害を解決しています。より大きな問題を解決するために、さらにいくつかのプロジェクトが必要になります。
Wen 氏がプロジェクトの成果について語ったように、「誰もがこれを望んでいます」
ROSとは?
Advanced Robotics for Manufacturing (ARM ) Institute によって資金提供された技術開発プロジェクトの一部では、ROS-Industrial ソフトウェア内の多くのコンテンツを活用して、その機能をさらに強化し、一般的な産業用に開発されたモジュールを理想的に強化しています。

ROS-Industrial の基本的なソフトウェア コードである ROS の歴史は、シリコン バレーに根ざしています。
ROSコードは、シリコンバレーの億万長者でGoogleの主要なソフトウェアアーキテクトであった創業者スコット・ハッサンが率いるウィローガレージで働くチームによって開発された、と彼のその後の会社であるSuitable Technologiesのウェブサイトに掲載された略歴によると. ROS、そして現在の ROS2 は現在、非営利の Open Robotics によって開発および保守されています。
一般的に使用される名前である ROS は、「ロボット オペレーティング システム」の頭字語ですが、それはその機能を軽視しています。
「ROS は、プロセス管理とスケジューリングという従来の意味でのオペレーティング システムではありません。むしろ、ホスト オペレーティング システムの上に構造化された通信層を提供します…」と、Willow Garage Web サイトの ROS の概要によると.
自動制御システム