


Arduino ロータリー エンコーダ – Arduino でロータリー エンコーダを使用するためのガイドライン
Arduino ロータリー エンコーダは、その頑丈な構造と優れたデジタル制御により、CNC マシン、ロボット工学、さらにはプリンターでさえも役立ちます。
Arduino ロータリー エンコーダー プロジェクトに取り組んでおり、助けが必要な場合は、適切な場所にいます。
今日の記事では、ロータリー エンコーダー、その構成、種類、動作、例、およびアプリケーションについて説明します。
ロータリー エンコーダーとは?
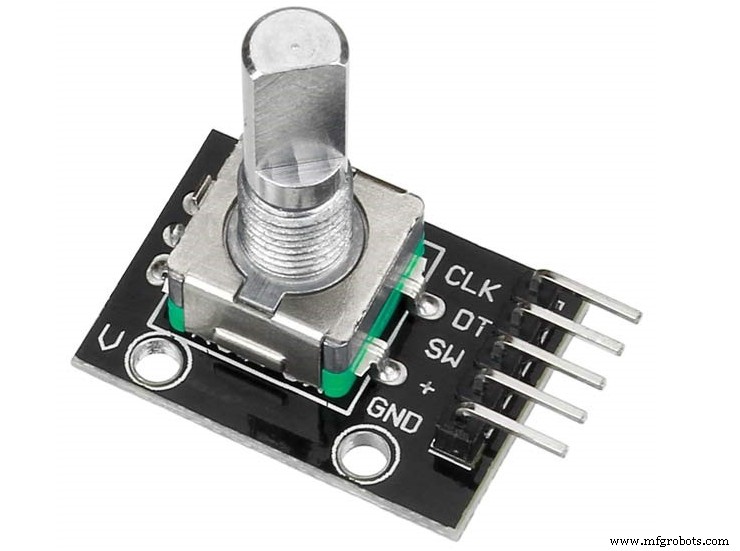
図 1:ロータリー エンコーダー
これは、シャフトまたは車軸の角度位置または動きを決定する電気機械式位置センサーです。
次に、角度位置データをデジタルまたはアナログ出力信号に変換します。
ロータリー エンコーダーのピン配置
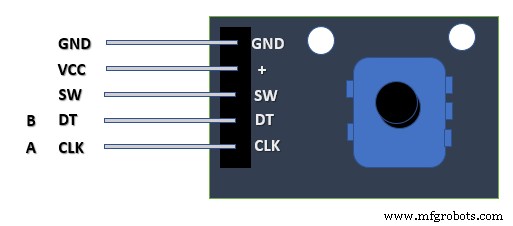
図 2:ロータリー エンコーダのピン配置
- VCC- 3.3 または 5V の供給電圧
- GND- グラウンド
- SW - アクティブ ロー ボタン
- CLK (出力 A) - どちらかの方向の回転を決定するための出力パルス
- DT (出力 B) - CLK を 90 度遅らせ、回転方向を決定します
ロータリー エンコーダーの種類
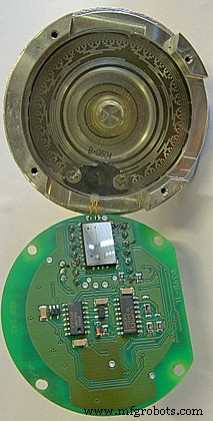
図 3:13 トラックのグレイ コード アブソリュート ロータリー エンコーダー
出典:ウィキメディア
アブソリュート エンコーダー
光検出器、光源、ディスク、信号調整器で構成されています。電源が失われたときに位置情報を保持し、電源が戻ったときに再開します。
また、制御対象機械の物理位置とエンコーダ値の関係は組立時に設定します。位置精度を維持するためにキャリブレーション ポイントに戻る必要はありません。
インクリメンタル エンコーダー
インクリメンタル エンコーダは、電源を入れるとゼロからカウントを開始し、位置の変化をすぐに報告します。ただし、絶対位置は保持しません。位置の読み取りを開始するには、監視システムを固定基準点に移動する必要があります。
ロータリー エンコーダーの仕組み
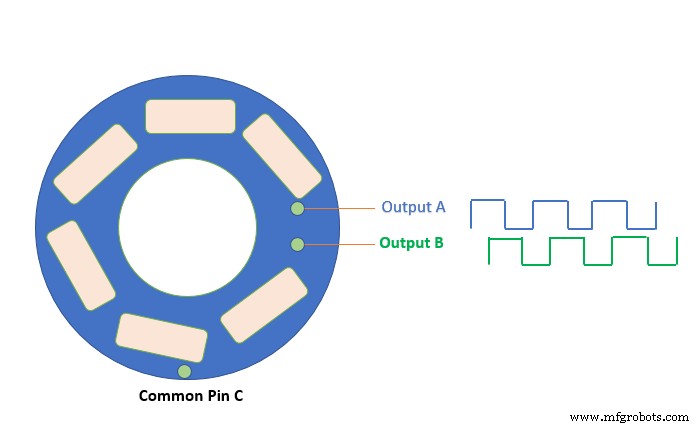
図 4:ロータリー エンコーダーの動作
AとBの2つのコンタクトピンと、共通のグランドピンCがあります。ノブAとBのコンタクトピンCを順番に回転させると、信号が出力されます。さらに、符号は互いに 90 度位相がずれています (直交符号化)。
ノブを時計回りに回すと、ピン A が最初に接続され、次にピン B が接続されます。また、ノブを反時計回りに回すと、反対のことが起こります。
次に、ピンが地面に接続され、地面から切断されるタイミングを追跡して、回転方向を決定できます。
ロータリーエンコーダの選び方
インクリメンタルまたはアブソリュート エンコーダー?
コストと容量の比率が優れているもの、または起動時に原点に戻るかどうかを選択します。また、耐ノイズ性と最高速度に応じていずれかを選択してください。
どの程度の解像度が必要ですか?
必要な精度と設備のコストに見合ったものをお選びください。したがって、使用するマシンの精度の ½ から ¼ の解像度を持つものを選択する必要があります。
寸法
取付スペースは、使用する回転軸の種類を考慮してください。参考までに、シャフトは中空または規則的です。
許容シャフト荷重
エンコーダを選ぶときは、取り付け方法がシャフトの負荷と機械的寿命にどのように影響するかを考慮してください。
最大許容速度
使用時の機械的最高速度を考慮して選定してください。
最大応答頻度
併用する場合の装置軸の最高速度により選定してください。
最大応答周波数 =(回転 (RPM)/60) * 分解能。
応答周波数の最大値に余裕のある仕様のものを選定してください。
保護の程度
作業環境の粉塵、油、水などに応じて機種をお選びください。
- ほこりのみ:IP50
- 水または油の存在:IP52 (f)、IP64 (f)
- オイルあり:耐油性のあるものを選択
シャフトの始動トルク
この場合、起動トルクを考慮してください。
出力回路タイプ
ここで、信号周波数、伝送距離、ノイズ、および接続デバイスを考慮してください。
ロータリー エンコーダーの長所と短所
図 5:3D プリンターおよび CNC マシン用のステッパー モーターおよびタイミング プーリーの機械部品
利点
- 高解像度
- 低コストのフィードバック
- 高い精度と信頼性
- コンパクト
- デジタル技術と光学技術を組み合わせる
短所
- 無線信号と磁気信号が磁気エンコーダーに干渉する
- 直接光が光学式エンコーダーに干渉する
- 油、汚れ、ほこりの影響
ロータリー エンコーダー Arduino の例
基本的な例
Arduino ボード、LCD、ポテンショメータ、接続ワイヤ、ブレッドボードが必要です。以下のように接続します。
モジュールの +V ピンを Arduino の 5V ピンに接続し、セットアップを接地します。次に、CLK ピンと DT ピンをそれぞれデジタル ピン 2 と 3 に接続します。
ロータリー エンコーダを使用したステッピング モーターの制御
Arduino ボード、ステッパー モーターとドライバー ボード、ロータリー エンコーダー、ブレッドボードが必要です。
エンコーダの GND を Arduino GND に接続し、+ を Arduino 5V ピンに接続します。さらに、DT を Arduino アナログ ピン 5 に、CLK を Arduino アナログ ピン 4 に接続します。
ロータリー エンコーダーでサーボ モーターを制御
ロボットのアームなど、オブジェクトの正確な位置を必要とするプロジェクトでは、ロータリー エンコーダが重要です。
サーボモータの茶/黒線を接地してご使用ください。また、サーボモーターの赤線を 5V 電源に接続します。最後に、PWM 対応ピン 9 へのオレンジ/イエロー ワイヤ。
結論
これまで見てきたように、多くのプロジェクトで Arduino でロータリー エンコーダを使用できます。それらは使いやすく、用途が広く、安価に入手できます。プロジェクトの支援が必要な場合、または明確化が必要な灰色の領域がある場合は、お問い合わせください。
産業技術
- 通信プロトコル:エンコーダアプリケーションのオプションの確認
- フライトシミュレータ用のArduinoを備えたLCDパネル
- FS2020用のArduinoを備えたスイッチ/ LEDパネル
- エンコーダの修理とトラブルシューティングのための6つの簡単なヒント
- プッシュボタンを使用したPWMによる調光ライト
- PythonでArduinoとRFIDを使用した出席システム
- ロータリーエンコーダー付きDIYシンプル測定ホイール
- ArduinoでMAX30100ウェアラブルパルスセンサーを使用する
- ArduinoでのYL-39 + YL-69土壌湿度センサーの使用
- 換気のための穴あき板金の使用
- ロータリーエンコーダはロボットの絶対位置精度を向上させます