


ビデオゲームタスク自動化デバイス
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 |
必要なツールとマシン
|
このプロジェクトについて
Hello world、
あなたが古い学校のゲーマーなら、ニンテンドーNESR.O.Bを覚えているかもしれません。 1985年頃。現場の世代にとって、それはNESコントローラーを保持し、画面を見て、あなたと遊んだり、対戦したりするロボットでした。
はい、私は1985年を意味しました。
はい、任天堂ロボットと言いました。
<図>
ビデオゲームで繰り返しの作業を強いられると、R.O.Bが常に頭に浮かびます。コントローラーをロボットの仲間に渡して、彼らに足の不自由なものを処理させるのは素晴らしいことではないでしょうか? Elder Scrolls Onlineで何百匹もの魚をフィレットすることに直面して、私はより良い解決策を思いついた。残念ながら、それはR.O.B 2.0ではありません、それは私のために釣りをしません...まだ。ただし、これはコンソールコントローラーのボタンを数秒ごとに押すようにプログラムされたデバイスです... Skynetに注意してください。
プロジェクトビルド
SparkFunの配送ボックスといくつかのフォームシートをリサイクルして、Xboxコントローラー用のぴったりとしたホルダーを作成しました。
<図> <図>
<図>  <図>
<図>  <図>
<図> 
低音の木製シートを接着してサーボホルダーを作りました。片方の端に自動親指用のゴム製バンパーが取り付けられたスチレンチューブと、「親指」を所定の位置に保持するためのアークリックシート。 (私が3年以上後にこれを書いているので、現在3Dプリンターを所有しているので、これは容認できないメーカーの技術であり、直接修正されます。:D)
<図>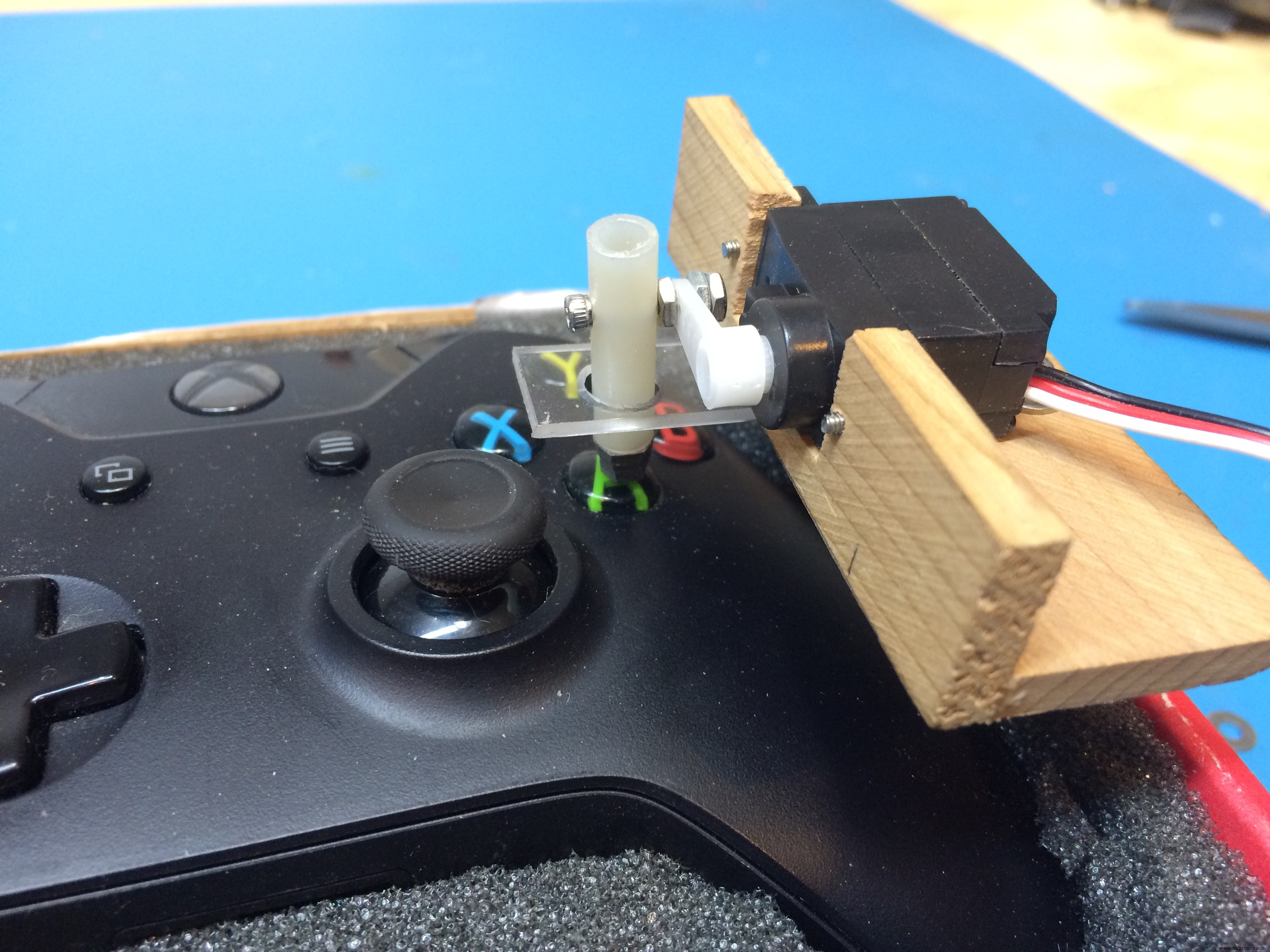 <図>
<図> 
<図>
 <図>
<図> 
コード
IBMワトソンはもっと気をつけてください。このコードには、人類を一掃する将来のAIが含まれている可能性があります...警告されたと言ってください。
真面目な話ですが、とてもシンプルなスケッチです。
#include // LibraryServoからservoMain; // Servovoid setup(){servoMain.attach(9);を定義します//デジタルピン9のサーボ} void loop(){servoMain.write(45); //サーボを左に45度まで回しますdelay(1500); // 1.5秒待ちますservoMain.write(0); //サーボを左に0度に回しますdelay(750); //.75秒待ちます}
まとめ
このプロジェクトは、友人と蒸気の間の冗談が生まれたときにいくらか始まりました。少しの創造性から大笑いするゲーマー。デザインには改善すべき点がたくさんありますが、シンプルに保つのが最善の場合もあります。
将来のバージョン
ある時点で、オートコントローラーを再検討する予定です。ケージアタッチメントを3D印刷し、画面(写真)とコントローラー(振動)からの感覚フィードバックを使用してすべての機能を追加します。オートレーサーは興味深い挑戦になるでしょう。将来的には、80年代にチェスのコンピューターが行ったような最高の人間と競争しているのを見ることができました。何か提案やフィードバックがあれば、ぜひ聞いてみてください。取り組むべき厄介なタスクを伴うゲームを知っていますか?以下に投稿してください。
終了
y(o.o)y
コード
- Oボタンを押す
Oボタンを押す Arduino
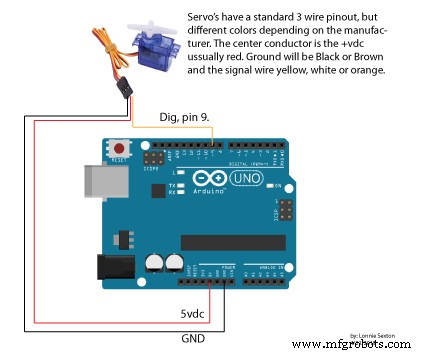
x秒ごとにサーボを操作してリモコンのボタンを押します。#include// LibraryServoサーボメインから; // Servovoid setup(){servoMain.attach(9);を定義します//デジタルピン9のサーボ} void loop(){servoMain.write(45); //サーボを左に45度まで回しますdelay(1500); // 1.5秒待ちますservoMain.write(0); //サーボを左に0度まで回しますdelay(750); //.75秒待ちます}
回路図
製造プロセス