


Arduinoを使用した自動植物散水システム
コンポーネントと消耗品
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
<図>

それらのトマトに水をやるのを覚えているのに問題がありますか?休暇に行きたいが、もしそうならあなたのコンテナガーデンにとって最悪の事態を恐れますか?自動植物給水システムでもう恐れることはありません!少しの準備とArduinoを用意することで、植物に適切な水を与えるシステムを作成できます。これにより、健康的なトマトを生産しながら、必要なものを自由に手に入れることができます。
ステップ1:計画を立てる! <図>
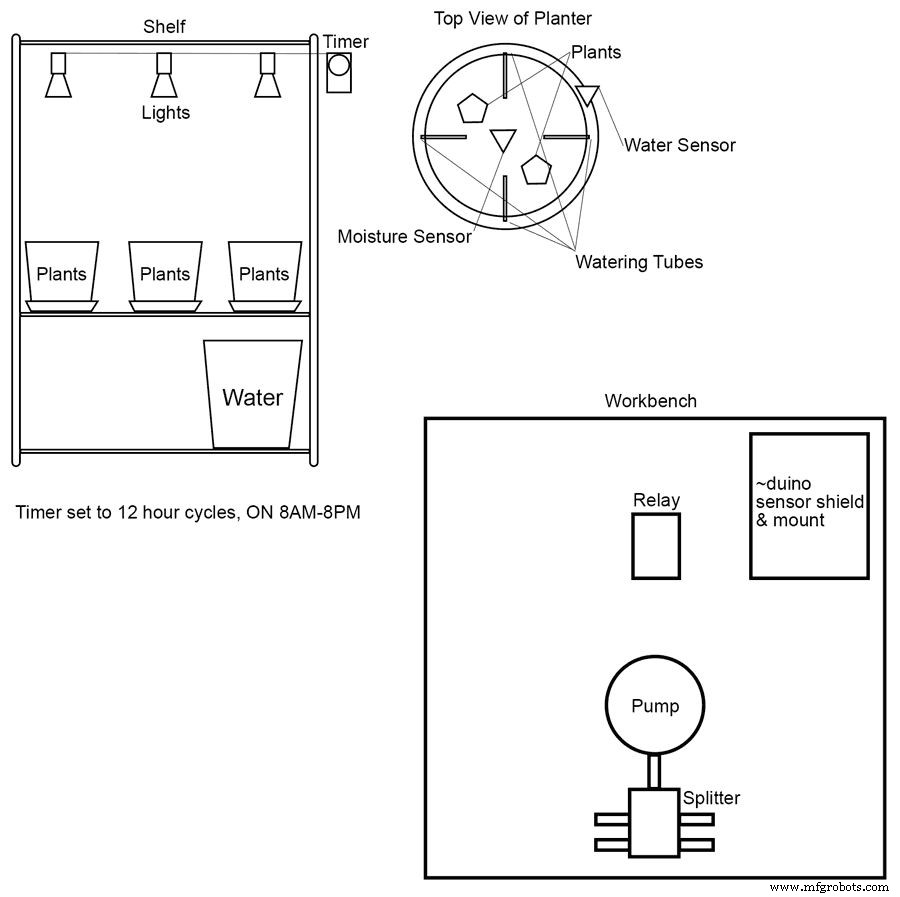
庭を成功させるには、計画が不可欠です。いくつかのアイデアを作成し、必要なものを決定し、物理的なビルドを組み合わせて、計画した12の異なる出口ポイントに水を送るのに十分な強度のポンプを確保できるようにしました。別の設定が必要な場合もあるので、外に出てたくさんのものを購入する前に、事前に考えておいてください。
ステップ2:物理的な構築と植え付け <図>
 <図>
<図>  <図>
<図> 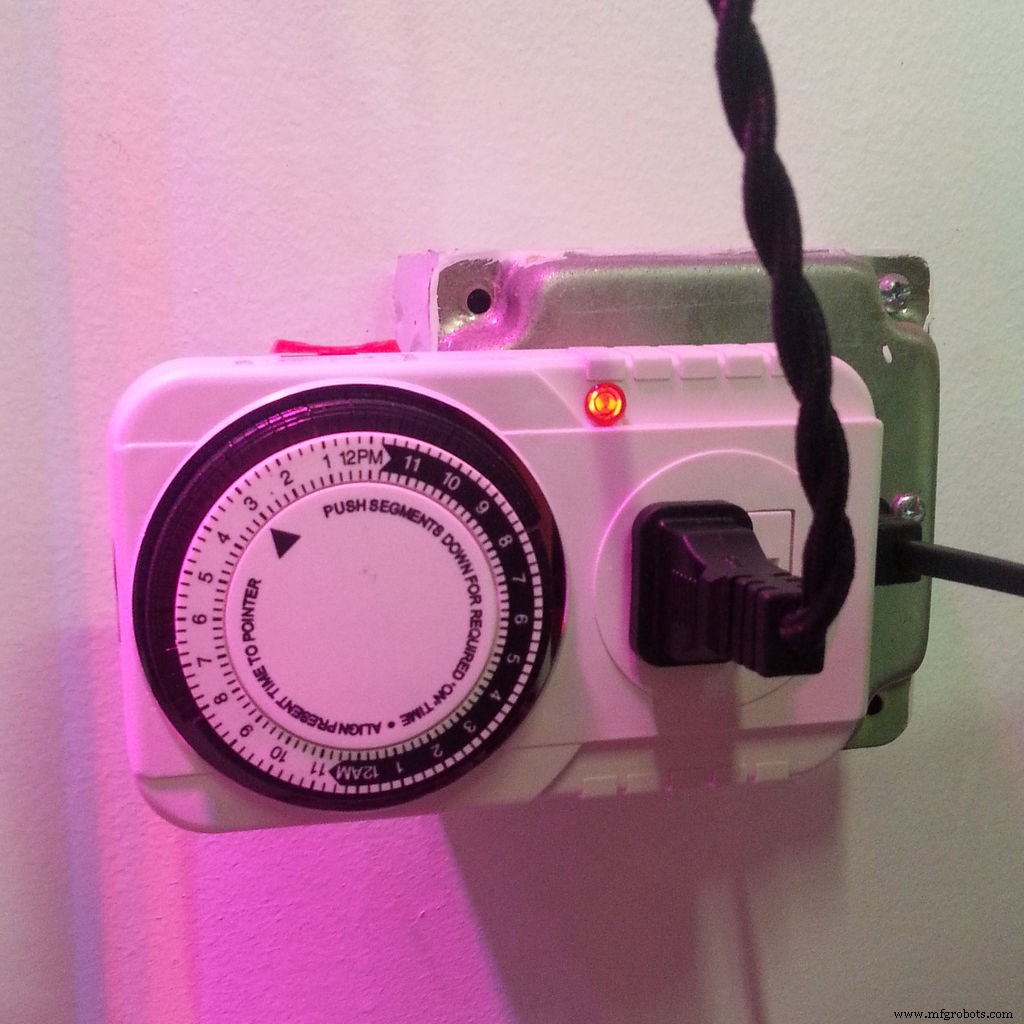 <図>
<図> 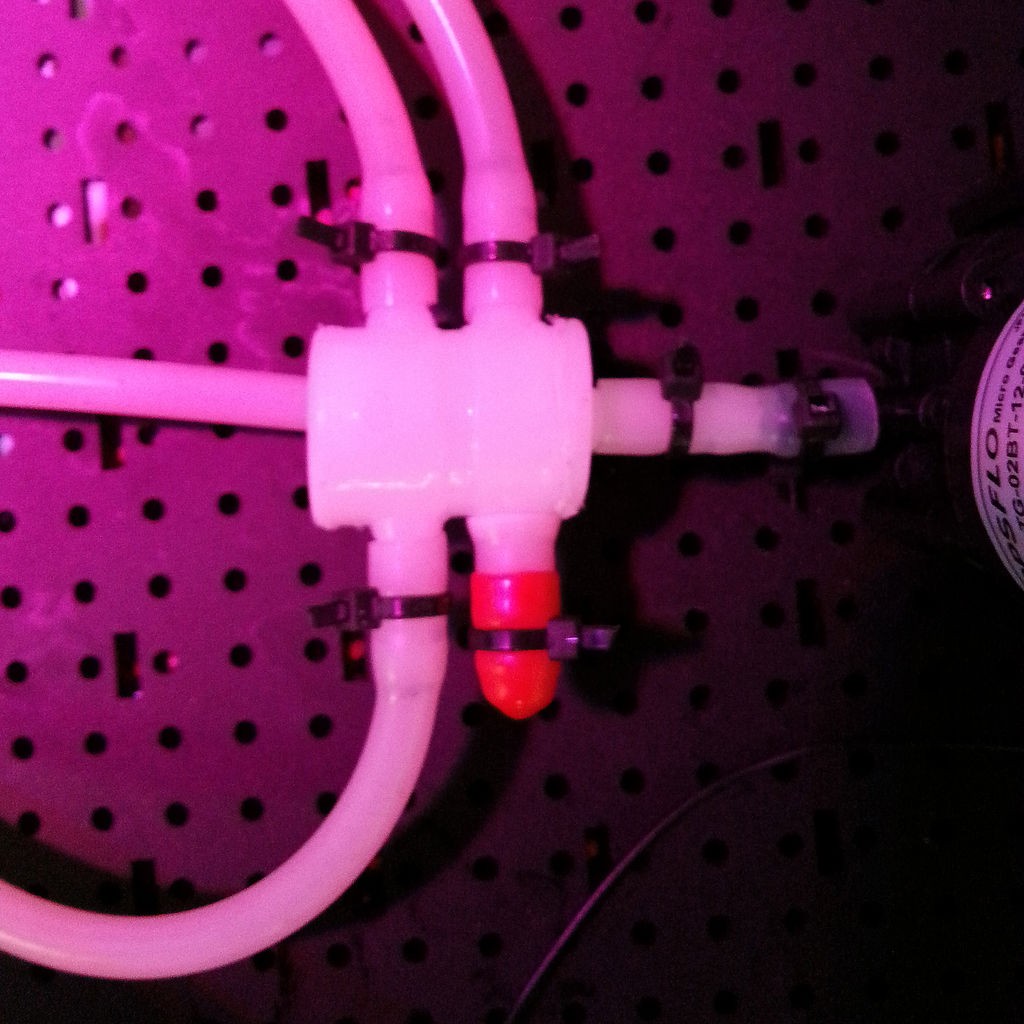 <図>
<図> 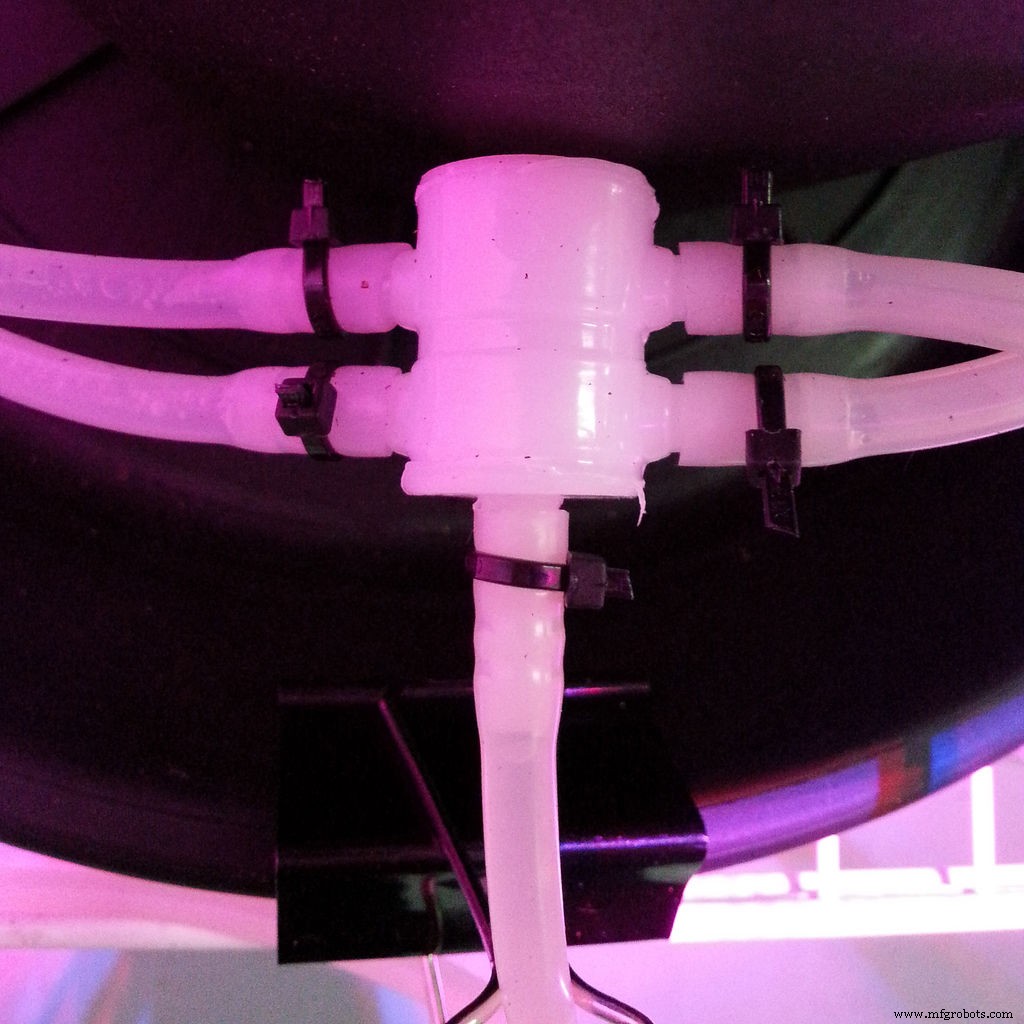 <図>
<図>  <図>
<図> 
すべてが棚にあります。ワイヤーフレームシェルフを使用している場合は、高さを最適に設定するのは簡単です。一番下の棚をバケツのできるだけ低くし、2番目の棚をできるだけ低く設定し、バケツにアクセスする余地を残して、植物ができるだけ成長する余地があるようにします。 3番目の棚をできるだけ高く設定し、植物の成長を最適化するために照明を調整する余地を与えます。
バケツに水を入れ、一番下の棚に置きます。
プランターに土を入れて、植物に新しい土を紹介します。
ただし、ライトを吊るすと、ライトの種類に最適です。ワイヤーフレームシェルフにケーブルを取り付けるためにいくつかのベルクロストラップを使用しましたが、さまざまなスタイルのグローライトと器具があり、それを行う方法は無数にあります。最適な配置については、グローライトに付属のマニュアルを参照してください。
ライトをタイマーに接続し、植物に適度な量の光を提供するようにタイマーを設定します。私たちが育てている光の種類とトマトについて示唆されたように、私たちの時間は12時間オン、12時間オフに設定されています。
電子機器を配置するのに適した場所を見つけて、ポンプを保持する場所までチューブを動かし始めます。バインダークリップを使用して、チューブを必要な場所に保持しましたが、驚異的に機能します。ポンプの配置に関しては、貯水池より高く、出口管より低くすることを目指す必要があります。これにより、ポンプの適切な動作が保証されます。チューブの端を植物の根元近くに配置し、水が直接根に流れるようにします。
それでは、すべてを配線して、マイクロコントローラーのプログラミングを始めましょう!
ステップ3:配線とプログラミング <図>
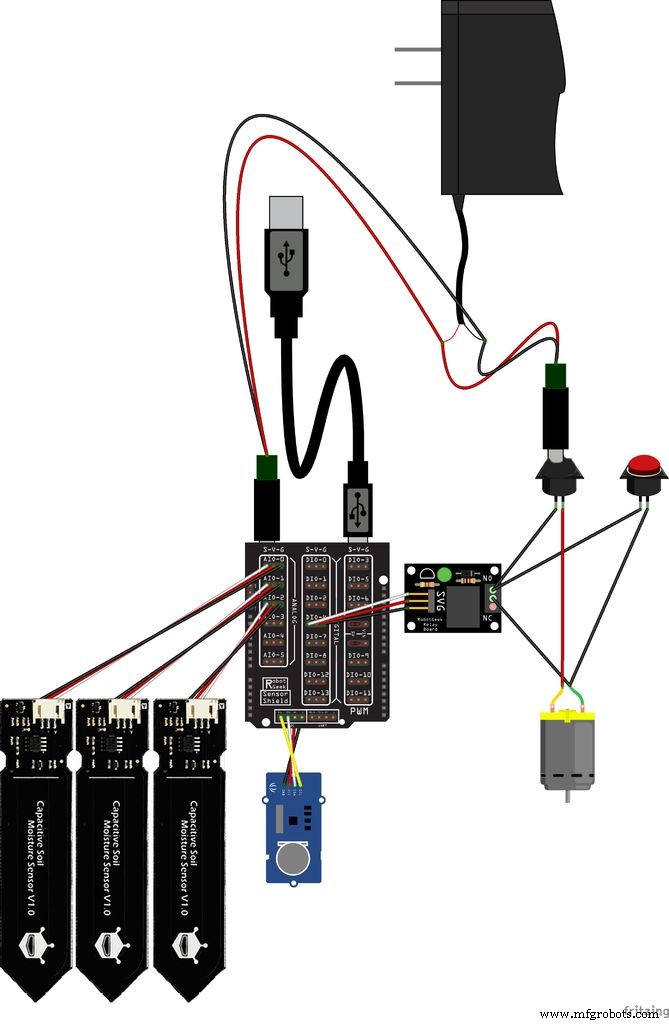
RTCを設定する必要があります。これは、この指示に従って行うことができます。
RTCを設定したら、上の図に従ってシステムを配線します。
<図>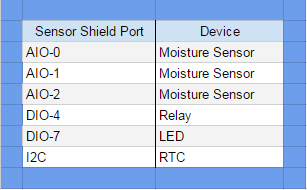
ここから自動植物散水スケッチを入手し、ArduinoIDEを介してGeekDuinoにロードする必要があります。
autoPlantWatering.ino
ステップ5:テストと調整 <図>
すべてを接続したら、電源を入れて、実行されるのを確認します。まあ、文字通りそこに座って、それが実行されるのを待つのはやめましょう。テストボタンを使用してポンプを実行およびプライミングし、流量が植物を爆破するほど強力ではなく、各出口で滴りが発生するほど弱くないことを確認します。植物は生き物なので、テスト中に植物に損傷を与えたくない場合は、バケツにコンセントを置いて、植物が行くのを見てください。
ストリームが強すぎる場合は、チューブを分割して出口を増やすか、ポンプ後のチューブの長さを長くすることができます。ストリームが弱すぎる場合は、チューブの長さを短くするか、システムの出口の数を減らすことができます。流量が良好であることに満足したら、水に設定した頃に植物をチェックして、システムの動作を監視します。
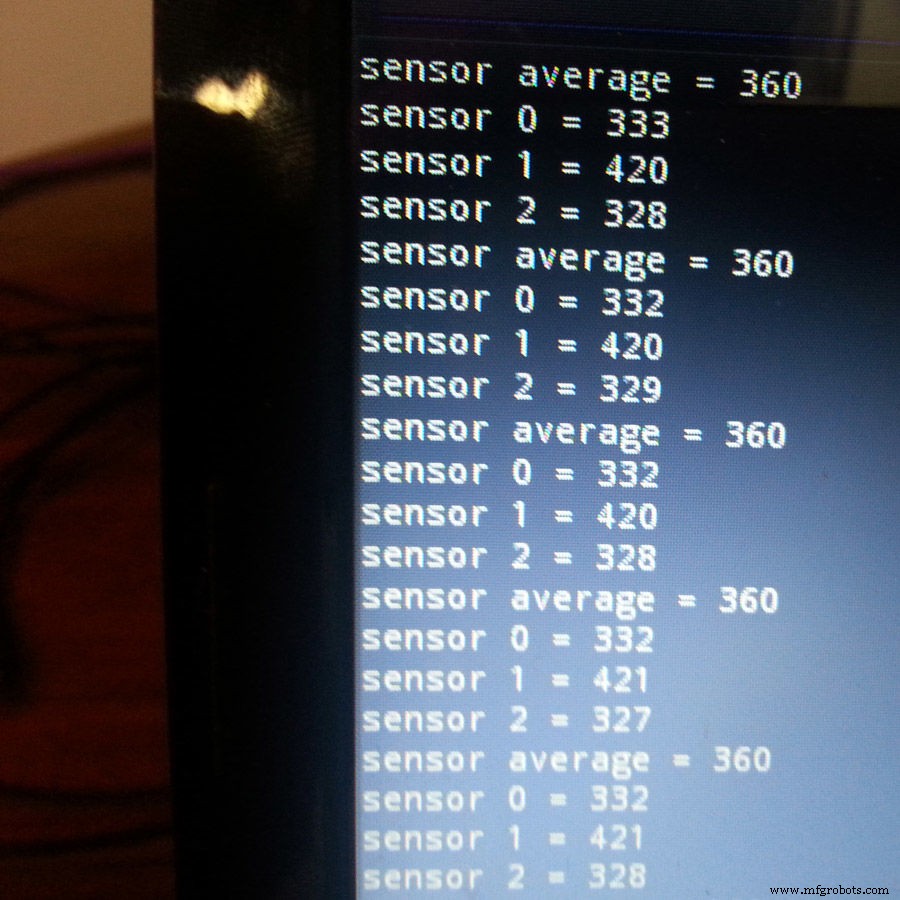
考慮すべきもう1つのポイントは、コードにあります。散水時間と水分平均を、植物に最適なものに設定できます。常に1日1回水を与えるように設定し、値が平均読み取り値420よりも乾燥しないことを毎分チェックしますが、植物または特定のセンサーに最適な値に設定できます。 〜duinoのUSBポートをPCに接続し、Arduino IDEのシリアルモニターを開くと、センサーの読み取り値を確認できます。毎分、センサーの読み取り値が更新されます。 DFRobot Moistureセンサーを使用すると、高い読み取り値は乾いた読み取り値になります。 500前後の測定値を取得している場合、土壌は完全に乾燥しています。適度に湿った土壌では、約300〜400の読み取り値が一般的です。
ステップ6:これで完了です! <図>

これで、システムの構築は完了です。良い結果が得られたとしても、それを監視することをお勧めします。水のバケツは最終的に補充する必要があり、植物は最終的にトリミングと収穫が必要になりますが、通常のコンテナガーデニングが引き続き適用されます。あなたが今あなたの植物に到達する水と十分な光についてはるかに心配する必要がないことを認めれば、物事はまだうまくいかない可能性があります。常にラインに漏れがないか確認し、電子機器から湿気をできるだけ遠ざけてください。
このシステムは、3点間の平均水分を使用して、毎日の散水サイクルを超えていつ散水するかを決定するという点で本質的に欠陥があり、その結果、植物に不均一な散水が発生する可能性があります。システムにポンプを追加すると、平均値の代わりにセンサーからの個々の読み取り値を使用して、ロット全体ではなく、必要に応じて各プラントに水を供給することができ、より良い結果が得られる可能性があります。植物がシステムに含まれている月に素晴らしい結果が得られました!確かに、次のクックアウトで巨大なエアルームトマトを食べるのを楽しみにしています。
ステップ7:更新 <図>

私たちのトマト植物は非常にうまくいっていますが、それらは非常に高くなり、棚を下に移動することを余儀なくされました。植物の側面からも光が当たるように反射板を追加しました。彼らがとても背が高くなった理由の1つは、それらすべての単一の光源に近づくことでした。今、彼らはトマトを育てて生産し始めることを願っています!
コード
Github
https://github.com/robotgeek/robotGeekLibrariesAndtools/blob/master/RobotGeekSketches/Demos/autoPlantWatering/autoPlantWatering.inohttps://github.com/robotgeek/robotGeekLibrariesAndtools/blob/master/RobotGeekSketches/Demos/autoPlantWatering/auto / section> 回路図
ドキュメントがありません。
製造プロセス