


スワイパー-自動TheTinder /バンブルスワイパー
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
裏話
私の友人は私をTheTinderにしました、そしてアプリのほとんどの人々のように、私はそれがどれほど単調であったかにすぐに失望しました。それから私は自分がはるかに優れたエンジニアであり、潜在的な配偶者であることに気づいたので、私が置いていた安価なステッピングモーターからこれをつなぎ合わせました。これで、BumbleまたはTinderのいずれかでこれを使用して1時間に800回以上のスワイプを取得することもできます!
クイック概要:
このビルドには、パーツの印刷、ステッピングモーターの配線とテスト、すべてをまとめるという3つの簡単な手順があります。
ステップ1:パーツを印刷する
3D印刷可能なファイルについては、https://www.thingiverse.com/thing:2849598を確認してください。これらのファイルについて注意すべき主な点は、ベースを作成するために50%のインフィルを使用したことです。これは、ベースをスワイプしても動かないように重量を量るためです。
<図>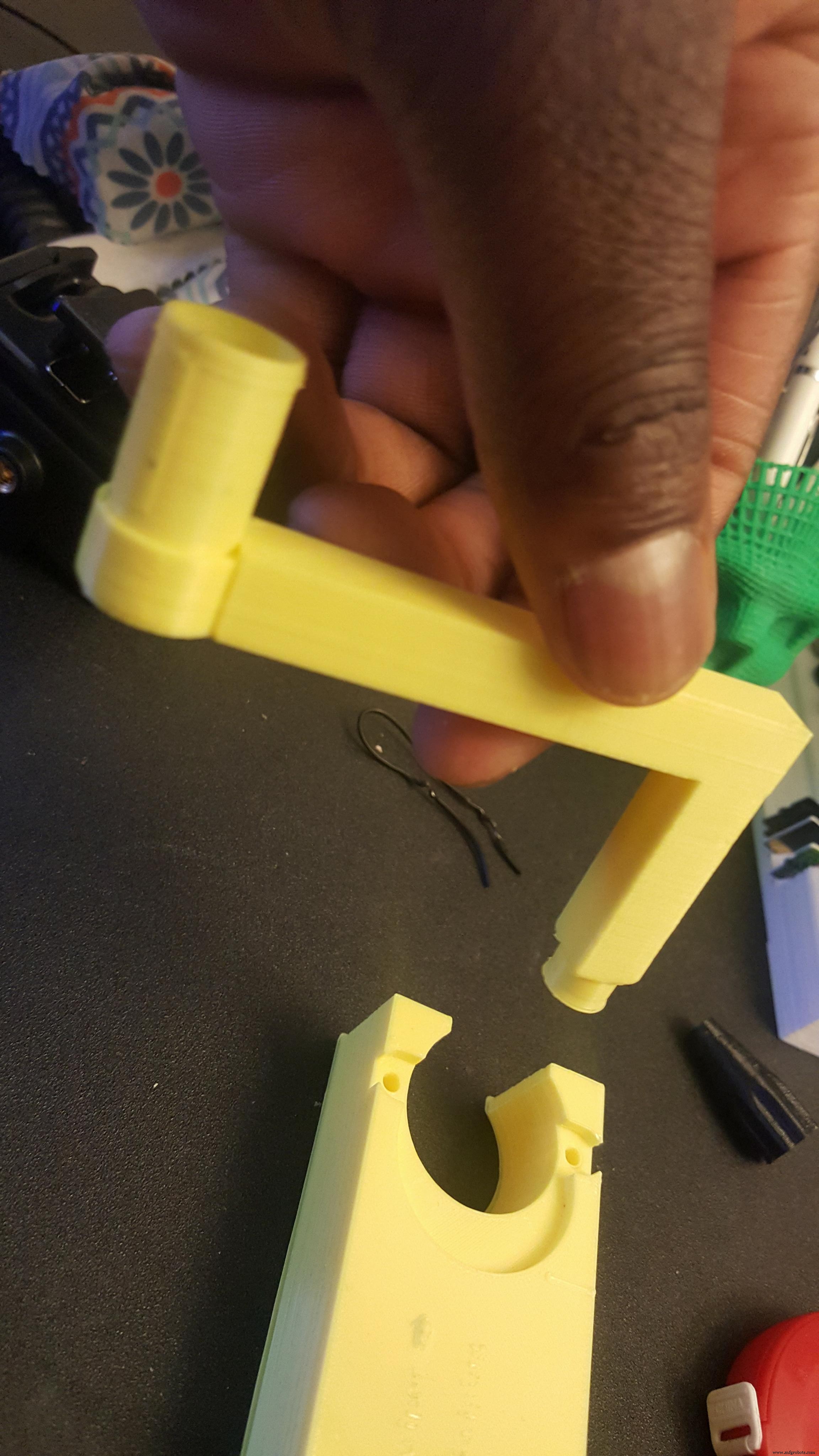
ステップ2:ステッピングモーター
ユニポーラ28-BYJ48ステッピングモーターとSBT0811ステッピングモータードライバーを使用しました。 28-BYJ48で動作するステッピングモータードライバーは問題ありません。次の設定に従ってArduinoUnoに配線するか、変更を反映するようにコードを変更してください。
- IN1>> D8
- IN2>> D9
- IN3>> D10
- IN4>> D11
- VCC>> 5V
- Gnd >> グラウンド
ArduinoUnoのコードはページの下部にあります。この時点で、コードをArduinoにアップロードするだけで、時計回りに回転するステッピングモーターを使用できるようになります。反時計回りに回転する方向を変更する場合は、 方向を切り替えるだけです。 false への変数
<図>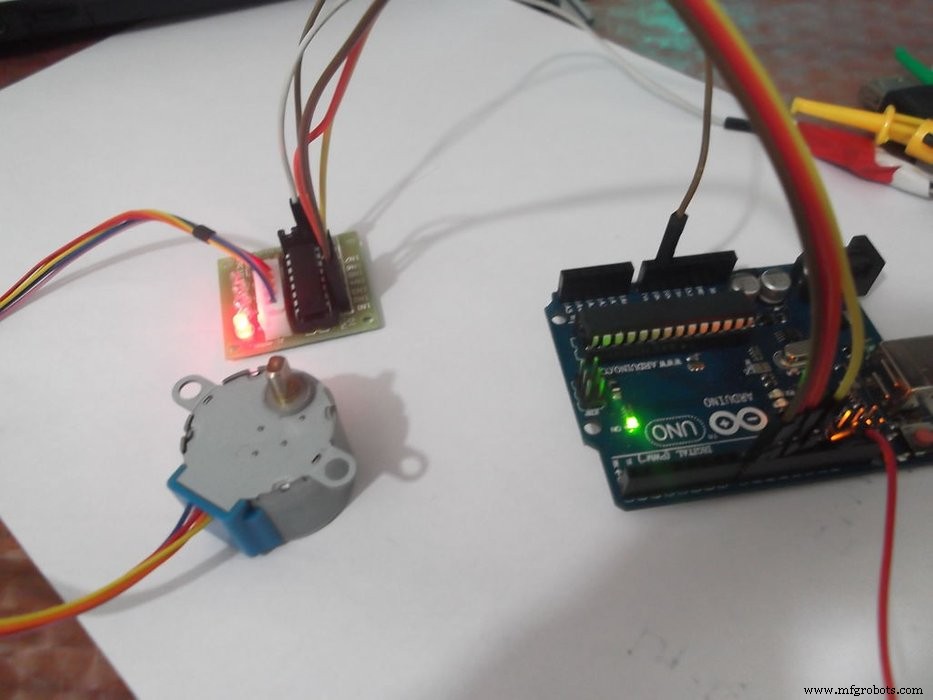 <図>
<図> 
ステップ3:すべてをまとめる
この時点で、すべての個別のパーツの準備ができており、それらを組み合わせるだけです。先に進み、最初にステッピングモーターをスワイパーベース内に配置します。 2本の小さな木ネジを使用して3Dプリントに固定しました。
<図>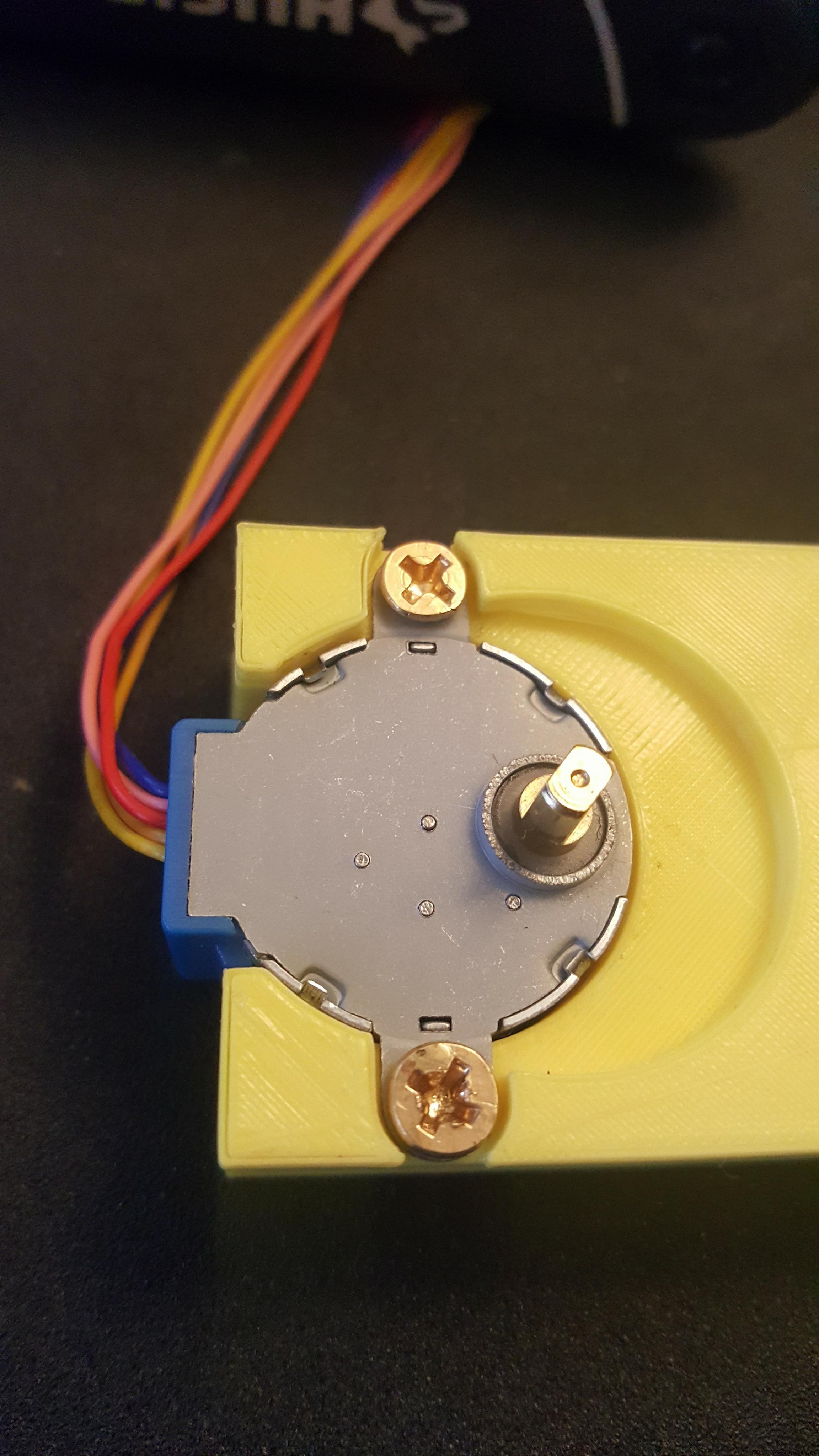
その後、先に進み、スワイパーハンドルをステッピングモーターに配置します。
<図>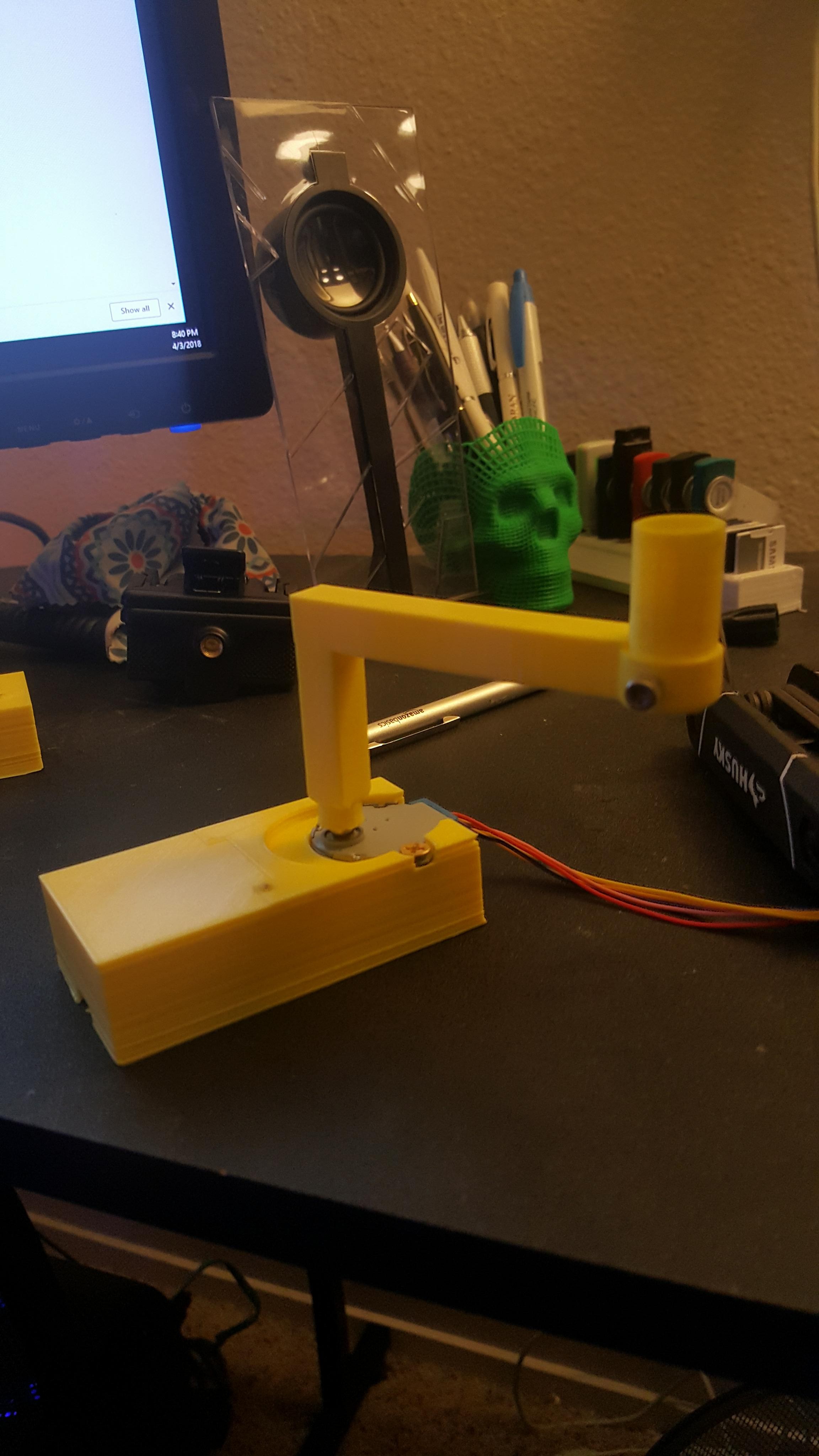
高さを調整するために;構造全体を電話の上に置き、タッチスクリーンペンが画面に触れるまでタッチスクリーンペンをスワイパーハンドルに置きます。
<図>
この時点で、先に進んで短いM3ネジを取り、タッチスクリーンペンを固定して、スワイプしても動かないようにします。
<図>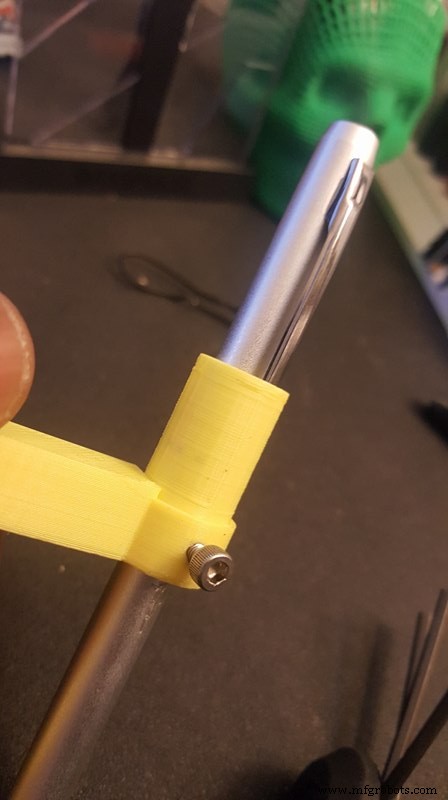
最後にスワイプを取得
構造全体を電話に隣接して配置し、目的の出会い系アプリを開き、Arduinoアプリを回して、座ってください!
<図>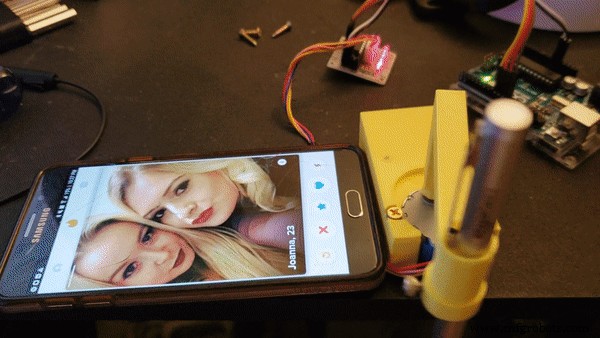
私はこれを4つの異なる電話でテストしましたが、電話の1つでスワイプを正しく登録できず、前の画面に移動していました。これは、最後にテストしたスマートフォンの端がかなり敏感だったためです。端を上げたケースにスマートフォンを置くことでこれを修正できます。そうすれば、タッチスクリーンペンが画面の端に登録されなくなります。
コード
- スワイパー
スワイパー Arduino
スワイプ方向を変更する場合は、方向を変更=falseからtrueに変更してください! / * BYJ48ステッピングモーターコード接続:IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd書き込み者: Mohannad Rawashdeh https://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 * /#define IN1 8#define IN2 9#define IN3 10#define IN411intステップ=0;ブール方向=false; //右スワイプの場合はtrueに変更unsignedlong last_time; unsigned long currentMillis; int Steps_left =4095; long time; void setup(){Serial.begin(115200); pinMode(IN1、OUTPUT); pinMode(IN2、OUTPUT); pinMode(IN3、OUTPUT); pinMode(IN4、OUTPUT); // delay(1000);} void loop(){while(steps_left> 0){currentMillis =micros(); if(currentMillis-last_time> =1000){stepper(1); time =time + micros()-last_time; last_time =micros(); Steps_left--; }} Steps_left =4095;} void stepper(int xw){for(int x =0; x 7){Steps =0;} if(Steps <0){Steps =7; }} 製造プロセス