


開始:スタンドアロンのARduinoターミナル
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
このプロジェクトについて
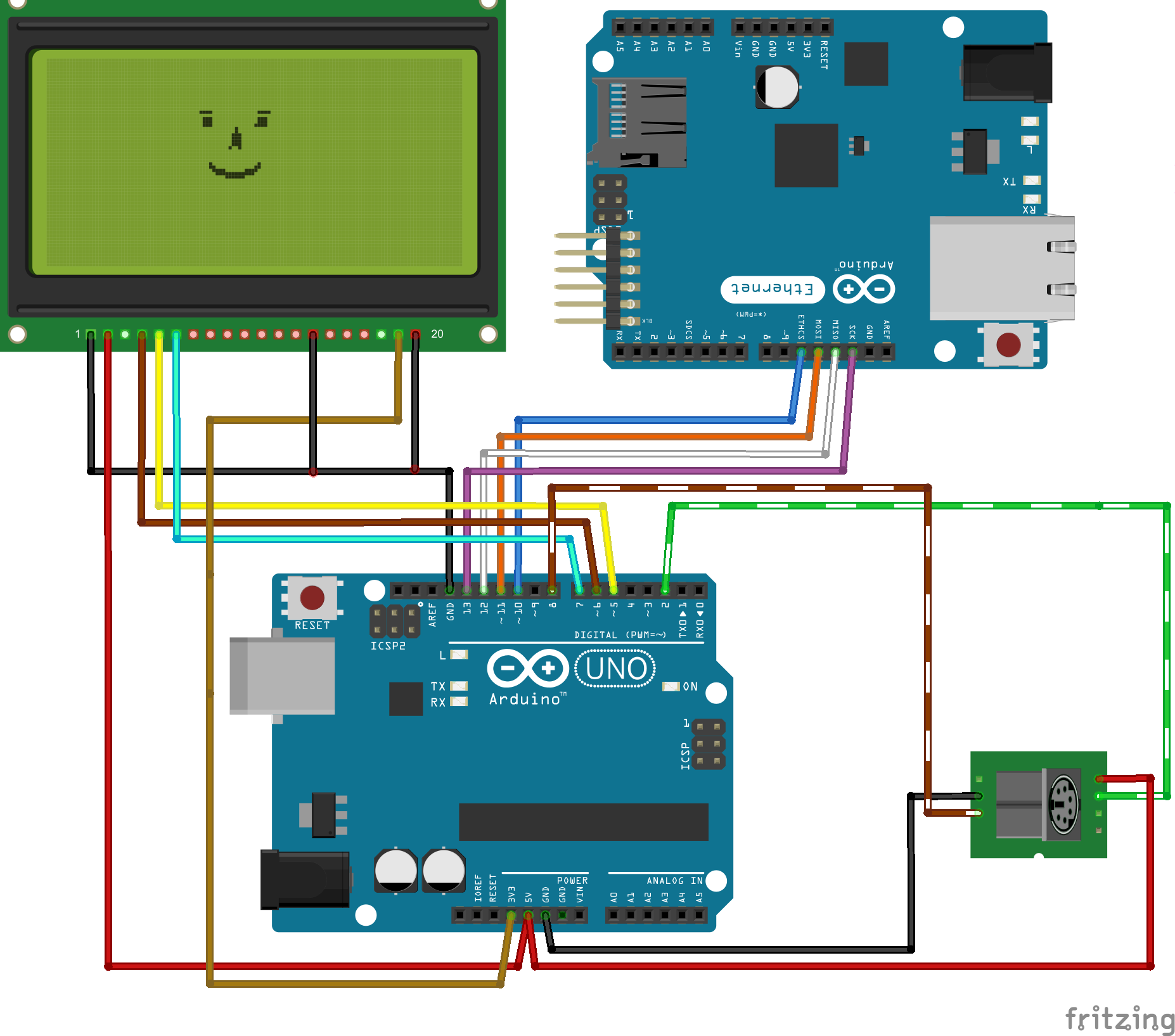
開始 ST です andalone AR duino T 装備されているerminal:
- PS2キーボード。
- 128x64のLCDモニター。
- イーサネットポート。
- オプションで、バッテリー。
開始 組み込みコマンドの小さなセットを実行してデジタルI / Oを制御し、実際のtelnetサーバーに接続して実際のシェルコマンドをリモートで実行することもできます!
はじめに:
開始 Arduinoライブラリの形式で提供されているので、他のライブラリと同じようにダウンロードしてインストールするだけです。
また、キーボードと液晶画面を機能させるには、これらのライブラリをダウンロードしてインストールする必要があります。
- PS2Keyboard
- U8glib
次に、runSTARTの例を開いてアップロードします!
組み込みコマンド:
これらのコマンドはすべて大文字と小文字が区別されます!
- 無料: まだ使用可能な空きSRAMをバイト単位で返します。
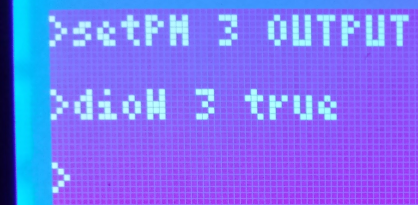
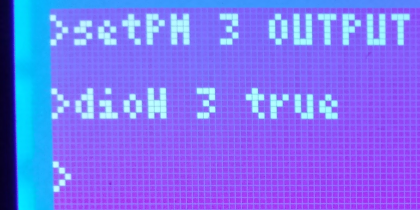
- setPM pinNumber入力/出力 : pinMode()のラッパー Arduino関数(例:
setPM 3 OUTPUT)
- getPM pinNumber INPUT / OUTPUT :ピンが以前に設定されたモードを返します(例:
getPM 7)
- dioW pinNumber true / false : digitalWrite()のラッパー Arduino関数(例:
dioW 3 false<コード>)
- dioR pinNumber : digitalRead()Arduino関数のラッパー (例:
dioR 3)
- telnet ipAddress : サーバーに実際に接続してリモートシェルコマンドを実行できる基本的なTelnetクライアント(例:
telnet 192.168.1.111<コード>)
ユーザー名/パスワードの入力を求められます:
<図>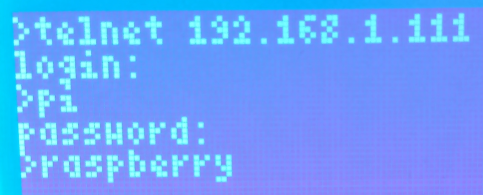
Enterキーを押して、数秒待ちます...そしてvoilà:
<図>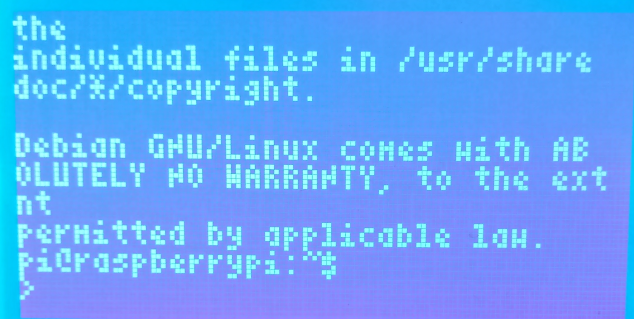
これで、Telnetサーバーにログオンし、コマンド、スクリプトを実行し、プログラムをリモートで実行できるようになりました。
ネットワーク設定については、ファイルnetwork.hを参照してください!
構築のヒント1:
PS2キーボードをSTARTに接続するために、PS2PCBコネクタとストリップボードからアダプタを作成しました。
<図>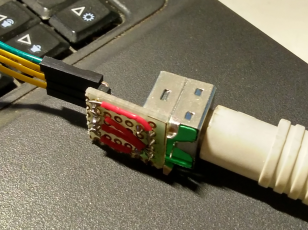
ここにあるピン配置によると:
<図>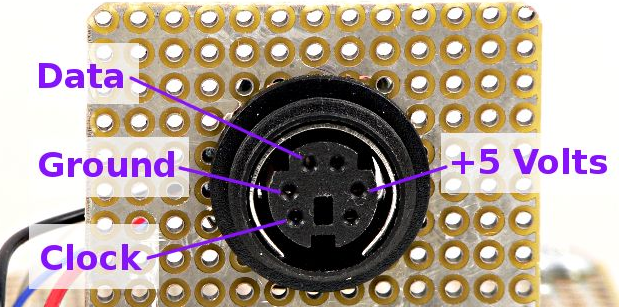
- データ Arduinoの
- 時計 Arduinoの
構築のヒント2:
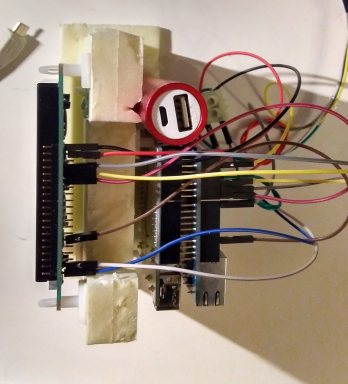
START を作成できます 端子は各コンポーネントを個別に配線するだけですが、ポリスチレンの「フレーム」といくつかのpcbプラスチックスペーサーを使用して、より「ポータブル」なデバイスを構築すると非常に便利であることがわかりました。
<図>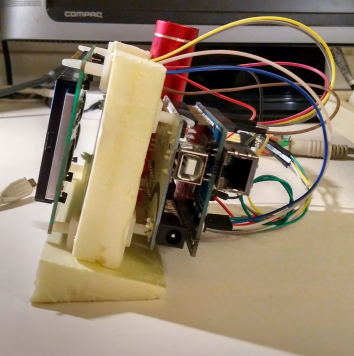
<図>
コード
Github
https://github.com/alejho/START 回路図
製造プロセス