


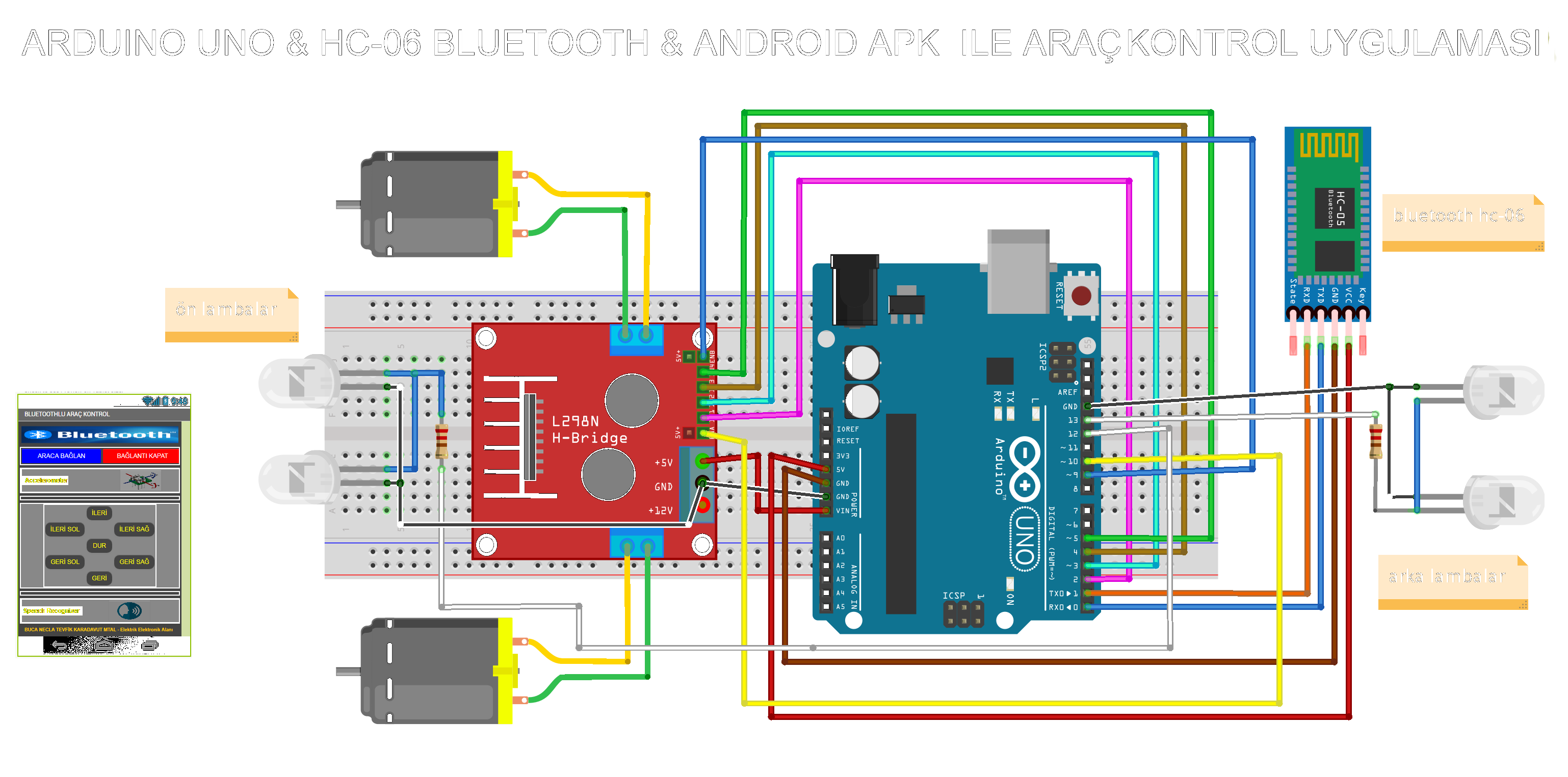
ArduinoUnoとBluetoothによる車の制御
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
| |||
 |
|
このプロジェクトについて
車をチェックしたかったのですが、リモートで試す方法はいろいろあります。これに必要なツールの後、そしてソフトウェアが書かれた後、私はブルートゥースでやりたかった。これはハックスターでの私の2番目のプロジェクトになります
<図>
コード
- arduinoコード
arduinoコード Arduino
char buffer [67]; byte Pino02 =2; byte Pino03 =3; byte Pino04 =4; byte Pino05 =5; byte Pino06 =6; byte Pino07 =7; byte Pino12 =12; byte Pino13 =13; void setup(){Serial.begin(9600); Serial.flush(); pinMode(Pino02、OUTPUT); pinMode(Pino03、OUTPUT); pinMode(Pino04、OUTPUT); pinMode(Pino05、OUTPUT); pinMode(Pino06、OUTPUT); pinMode(Pino07、OUTPUT); pinMode(9、OUTPUT); pinMode(10、OUTPUT); pinMode(12、OUTPUT); pinMode(13、OUTPUT);} void loop(){if(Serial.available()> 0){int index =0; delay(100); // deixe o buffer encher int numChar =Serial.available(); if(numChar> 65){numChar =65; } while(numChar-){buffer [index ++] =Serial.read(); } splitString(buffer); }} void splitString(char * data){Serial.print( "Dados inseridos:"); Serial.println(data); char *パラメーター; parameter =strtok(data、 "、"); while(parameter!=NULL){setLED(parameter);パラメータ=strtok(NULL、 "、"); } // Limpa o texto e os buffers seriais for(int x =0; x <66; x ++){buffer [x] ='\ 0'; } Serial.flush();} void setLED(char * data){if(data [0] =='A'){analogWrite(9、50); analogWrite(10、50); digitalWrite(Pino02、LOW); digitalWrite(Pino03、HIGH); digitalWrite(Pino04、HIGH); digitalWrite(Pino05、LOW); digitalWrite(12、HIGH); digitalWrite(13、LOW); } //İLERİSOLif(data [0] =='C'){analogWrite(9、50); analogWrite(10、50); digitalWrite(Pino02、HIGH); digitalWrite(Pino03、LOW); digitalWrite(Pino04、LOW); digitalWrite(Pino05、HIGH); digitalWrite(12、HIGH); digitalWrite(13、LOW); } //İLERİSAĞif(data [0] =='B'){analogWrite(9、25); analogWrite(10、25); digitalWrite(Pino02、HIGH); digitalWrite(Pino03、LOW); digitalWrite(Pino04、HIGH); digitalWrite(Pino05、LOW); digitalWrite(12、LOW); digitalWrite(13、HIGH); } //GERİ1if(data [0] =='M'){analogWrite(9、75); analogWrite(10、75); digitalWrite(Pino02、HIGH); digitalWrite(Pino03、LOW); digitalWrite(Pino04、HIGH); digitalWrite(Pino05、LOW); digitalWrite(12、LOW); digitalWrite(13、HIGH); } //GERİ2if(data [0] =='N'){analogWrite(9、125); analogWrite(10、125); digitalWrite(Pino02、HIGH); digitalWrite(Pino03、LOW); digitalWrite(Pino04、HIGH); digitalWrite(Pino05、LOW); digitalWrite(12、LOW); digitalWrite(13、HIGH); } //GERİ3if(data [0] =='P'){analogWrite(9、175); analogWrite(10、175); digitalWrite(Pino02、HIGH); digitalWrite(Pino03、LOW); digitalWrite(Pino04、HIGH); digitalWrite(Pino05、LOW); digitalWrite(12、LOW); digitalWrite(13、HIGH); } //GERİ4if(data [0] =='L'){analogWrite(9、225); analogWrite(10、225); digitalWrite(Pino02、HIGH); digitalWrite(Pino03、LOW); digitalWrite(Pino04、HIGH); digitalWrite(Pino05、LOW); digitalWrite(12、LOW); digitalWrite(13、HIGH); } //GERİ5if(data [0] =='D'){analogWrite(9、25); analogWrite(10、25); digitalWrite(Pino02、LOW); digitalWrite(Pino03、HIGH); digitalWrite(Pino04、LOW); digitalWrite(Pino05、HIGH); digitalWrite(12、HIGH); digitalWrite(13、LOW); } //İLERİ1if(data [0] =='H'){analogWrite(9、75); analogWrite(10、75); digitalWrite(Pino02、LOW); digitalWrite(Pino03、HIGH); digitalWrite(Pino04、LOW); digitalWrite(Pino05、HIGH); digitalWrite(12、HIGH); digitalWrite(13、LOW); } //İLERİ2if(data [0] =='I'){analogWrite(9、125); analogWrite(10、125); digitalWrite(Pino02、LOW); digitalWrite(Pino03、HIGH); digitalWrite(Pino04、LOW); digitalWrite(Pino05、HIGH); digitalWrite(12、HIGH); digitalWrite(13、LOW); } //İLERİ3if(data [0] =='K'){analogWrite(9、175); analogWrite(10、175); digitalWrite(Pino02、LOW); digitalWrite(Pino03、HIGH); digitalWrite(Pino04、LOW); digitalWrite(Pino05、HIGH); digitalWrite(12、HIGH); digitalWrite(13、LOW); } //İLERİ4if(data [0] =='L'){analogWrite(9、225); analogWrite(10、225); digitalWrite(Pino02、LOW); digitalWrite(Pino03、HIGH); digitalWrite(Pino04、LOW); digitalWrite(Pino05、HIGH); digitalWrite(12、HIGH); digitalWrite(13、LOW); } //İLERİ5if(data [0] =='U'){digitalWrite(Pino02、LOW); digitalWrite(Pino03、LOW); digitalWrite(Pino04、LOW); digitalWrite(Pino05、LOW); digitalWrite(12、LOW); digitalWrite(13、LOW); } // DUR if(data [0] =='E'){analogWrite(9、50); analogWrite(10、50); digitalWrite(Pino02、LOW); digitalWrite(Pino03、HIGH); digitalWrite(Pino04、LOW); digitalWrite(Pino05、HIGH); } //YAVAŞİLERİif(data [0] =='F'){analogWrite(9、50); analogWrite(10、50); digitalWrite(Pino02、HIGH); digitalWrite(Pino03、LOW); digitalWrite(Pino04、HIGH); digitalWrite(Pino05、LOW); } //YAVAŞGERİ} カスタムパーツとエンクロージャー
arduinoslider2_dxxyKBsRDa.apk 製造プロセス
- QR、RFID、温度検証によるアクセス制御
- Samsung SAMIIO、Arduino UNO、RaspberryPiで数分で火災探知機を作る
- イスラムの祈りの時間とArduino時計
- Arduinoでコインアクセプターを制御する
- LEDを制御するBluetoothを搭載したArduino!
- Arduino Nano:ジョイスティックで2つのステッピングモーターを制御
- ArduinoUnoでLEDマトリックスを制御する
- ArduinoUnoと1sheeldを備えた4x4x4LEDキューブ
- スクロールテキストを使用したArduinoBluetooth制御マトリックス
- ArduinoとBluetoothを備えたスマートコーヒーマシン
- ArduinoUnoを使用した25kHz4ピンPWMファン制御