


ArduinoNanoで食べるロボットを作る|金ネジ
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
| |||
 |
|
このプロジェクトについて
このプロジェクトのアイデアは私の娘から来ました。
彼女はロボットを望んでおり、このロボットは口を開けて食べ物を口に入れることができます。
そこで、屋内で利用可能なものを検索しました。段ボール、Arduino Nano、超音波センサー、サーボモーターなど、女の子が最速で、可能な限り低コストでプレイできるロボットを作成できるようにするためです。
>
ボディを作成
段ボールを使ってロボットの胴体を作っています
<図>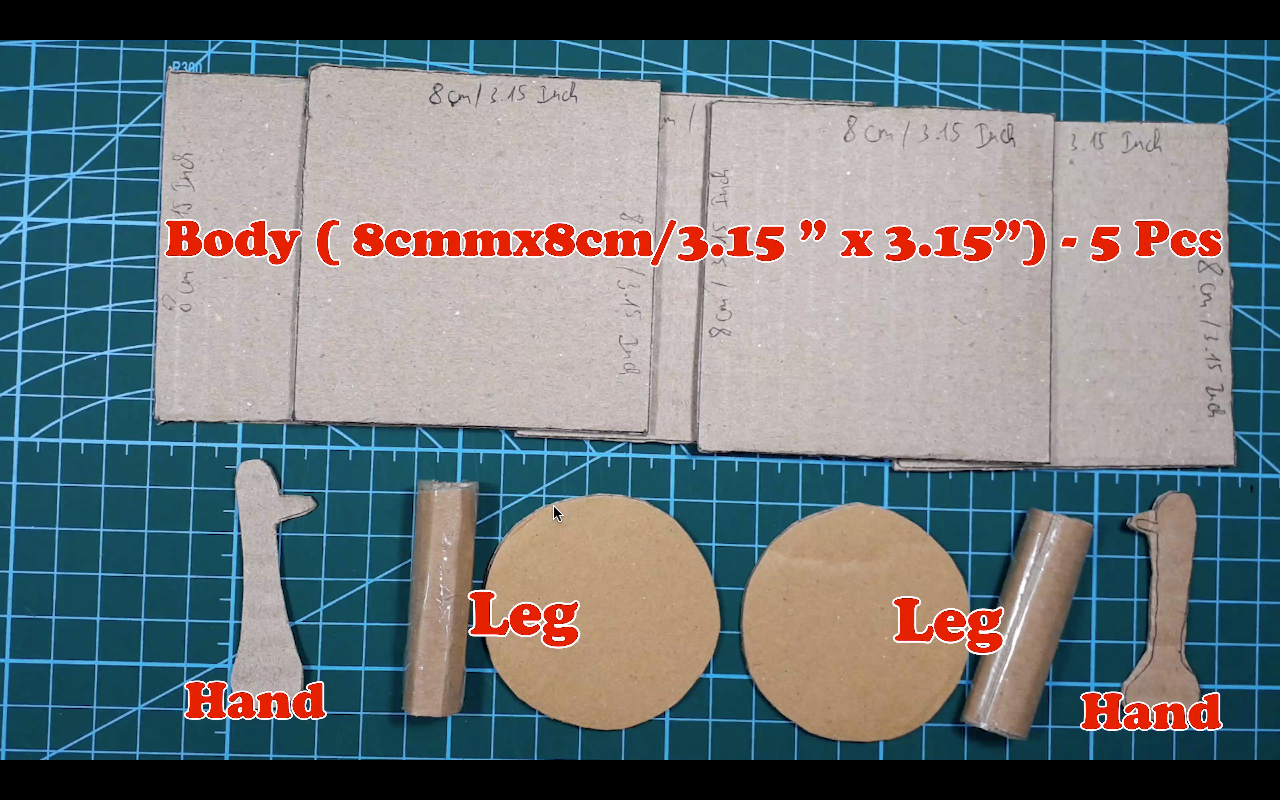
ホットグルーを使用してすべての部品を接続する
<図>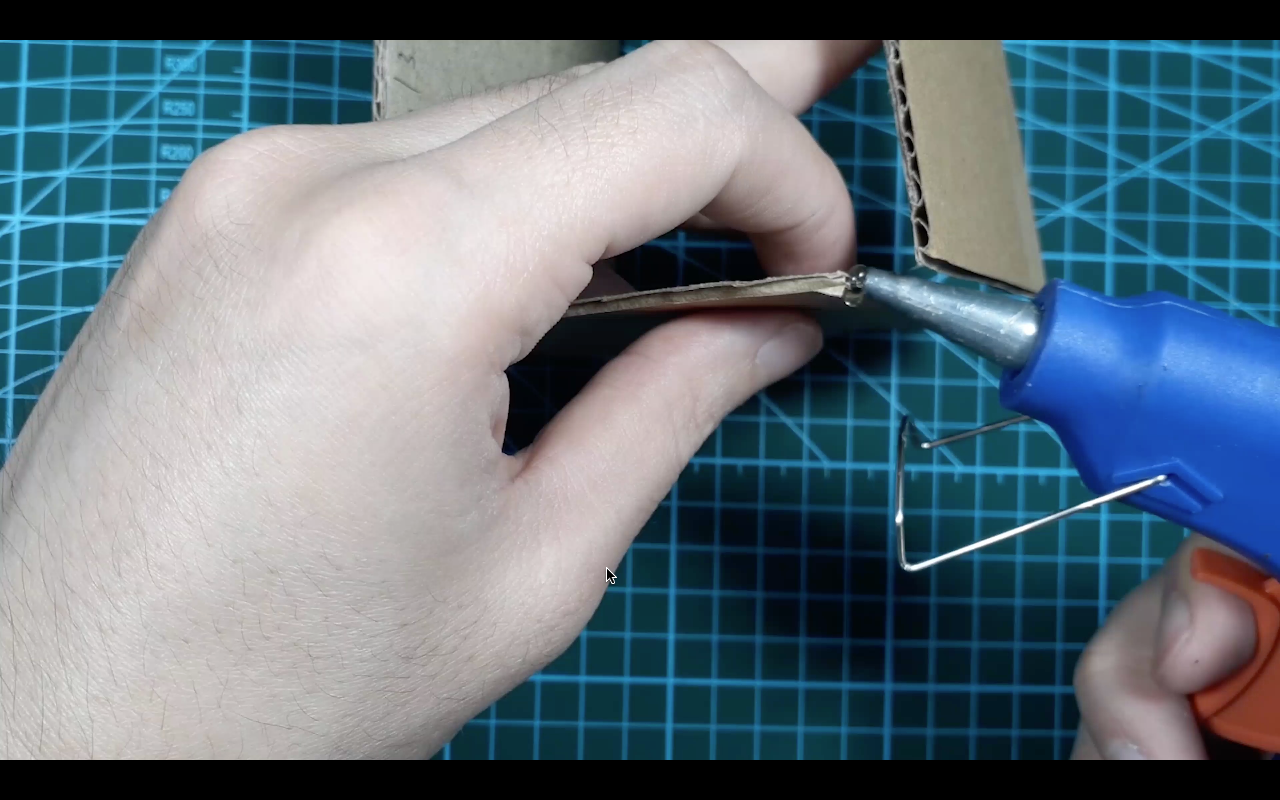
体のほとんどが終わった
<図>
アイホールを作る
<図>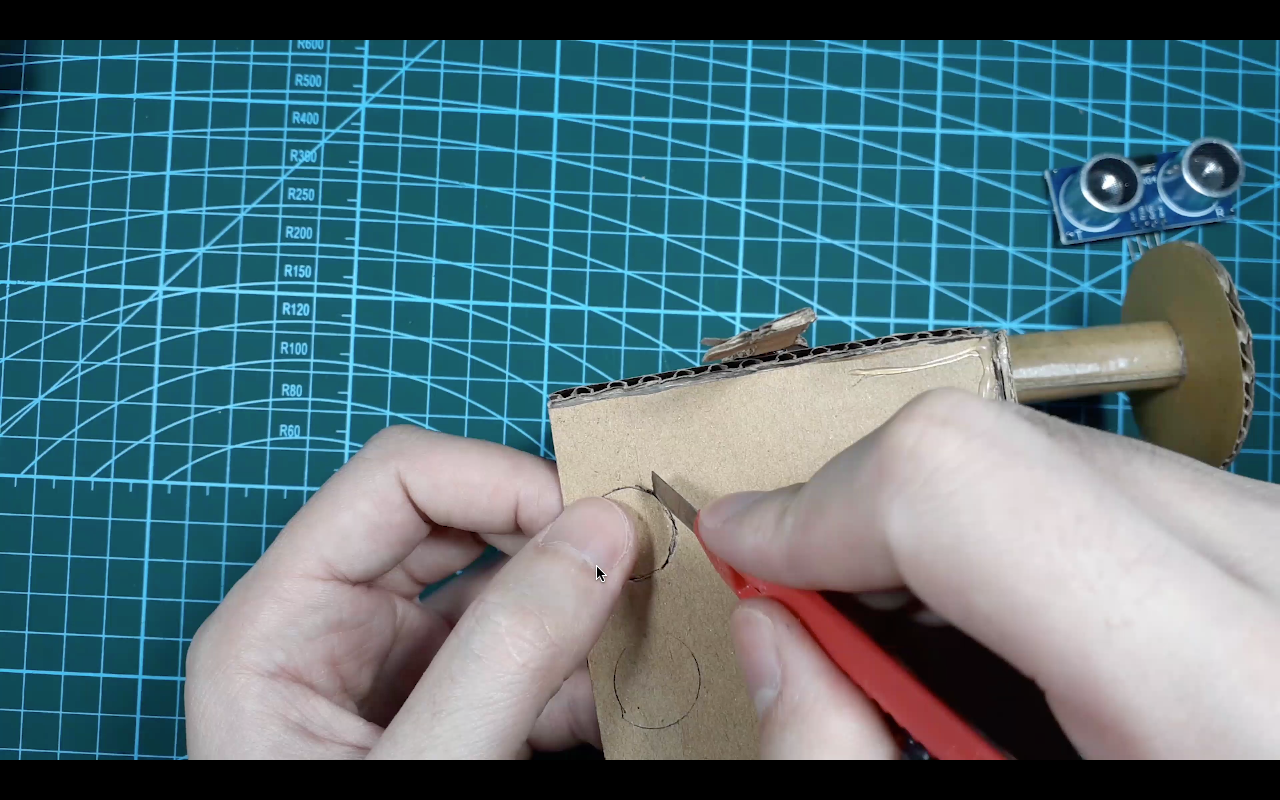
口を作る
<図>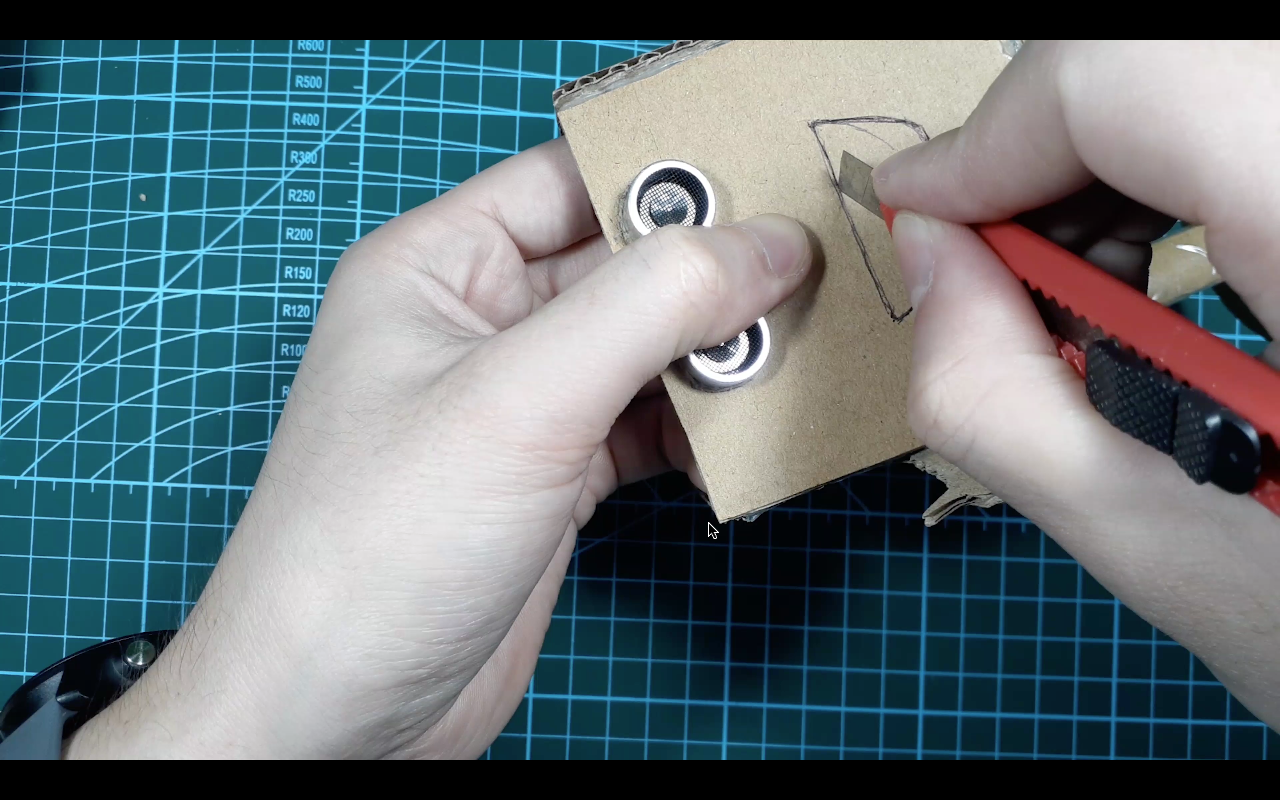
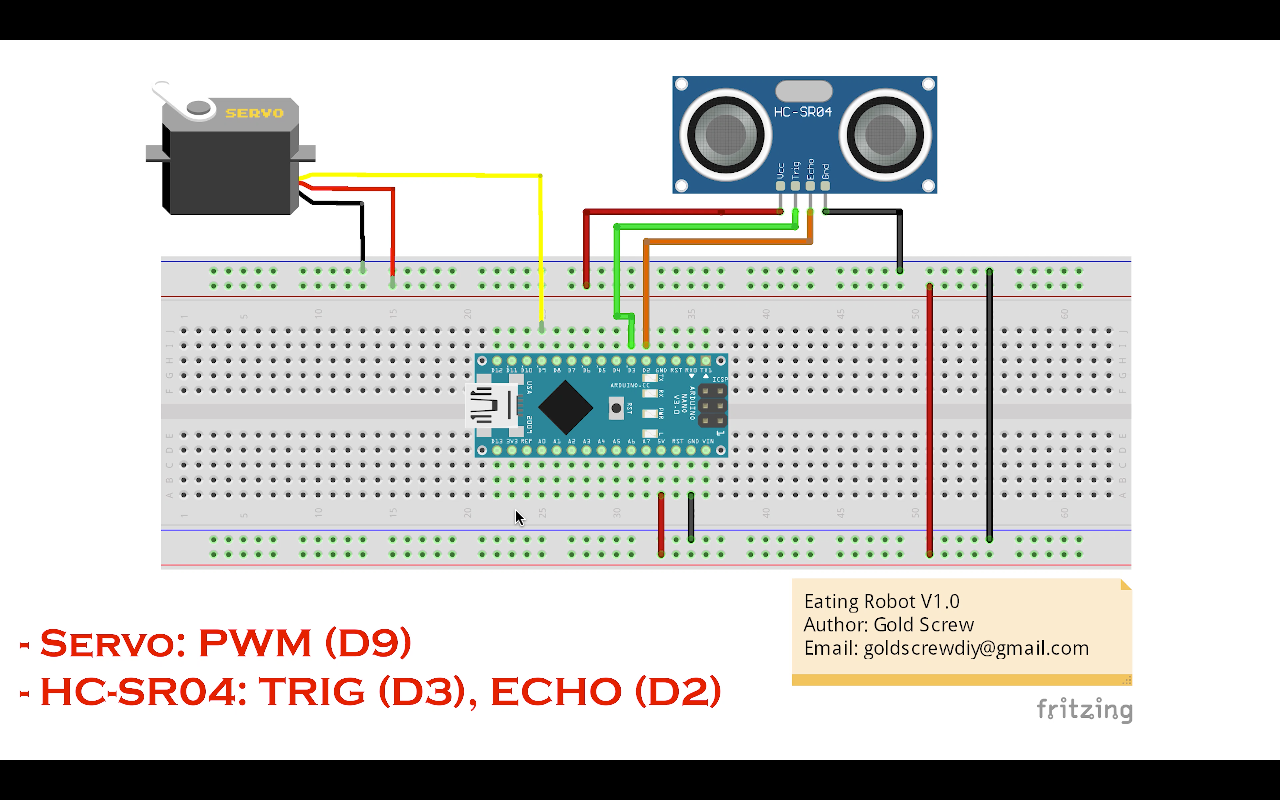
コンポーネント/部品の接続図
<図>
USB電源を接続する
<図> テストとデバッグ
<図>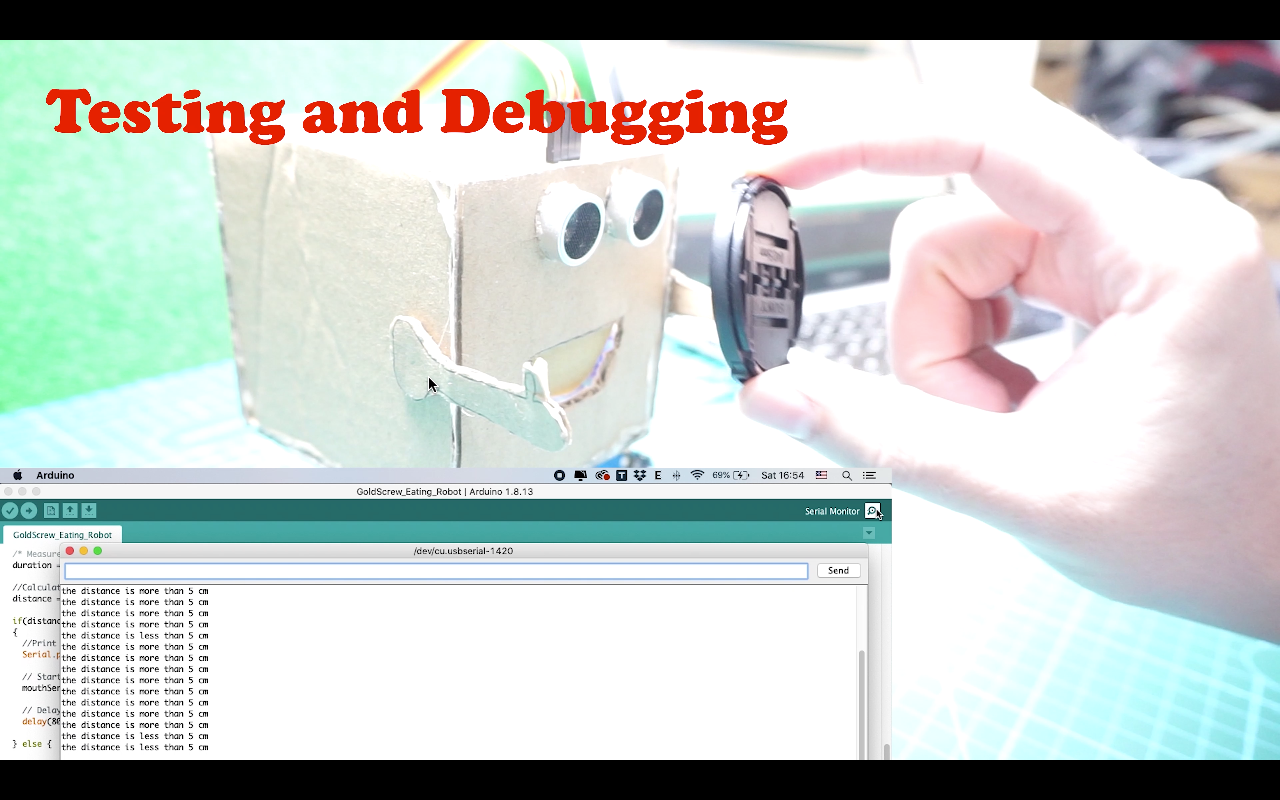
完了しました!
<図>
コード
- GoldScrew_EatingRobot.ino
GoldScrew_EatingRobot.ino Arduino
/ * *カートリッジを食べるロボット*作成者:GoldScrew *メール:goldscrewdiy@gmail.com *説明:HC-SR04(距離<=5 cmで食べ物を検出)とサーバー(口を開閉する)を使用しています* / #include#define SERVO_PIN 9 //サーボ用にピン9を設定// HC-SR04超音波センサーconstint trig =3; // HC-SR04のトリガーintecho =2; // HC-SR04のエコー// ServoServomouthServo; void setup(){//ボーレート960とのシリアル接続Serial.begin(9600); // TRIG pinMode(trig、OUTPUT);でシグナルを送信します// ECHOで信号を受信しますpinMode(echo、INPUT); //マウスサーバーmouthServo.attach(SERVO_PIN); mouthServo.write(90); } void loop(){/ *期間* / unsigned long duration; int距離; //距離/ * TRIGピンから信号を送信します* / digitalWrite(trig、0); //トリガーピンdelayMicroseconds(2);を停止します// 2マイクロ秒の遅延digitalWrite(trig、1); // TRIGピンから信号を送信delayMicroseconds(10); // 10マイクロ秒の遅延digitalWrite(trig、0); //トリガーピンを停止します/ * ECHOピンでHIGHパルス幅を測定します* / duration =pulseIn(echo、HIGH); //距離を計算しますdistance =int(duration / 2 / 29.412); if(distance <=5){//距離を印刷Serial.println( "距離は5cm未満"); //口を開け始めますmouthServo.write(0); //遅延delay(1200); } else {//印刷距離Serial.println( "距離が5cmを超えています"); //口を閉じますmouthServo.write(90); } // Delay delay(200);}
回路図
製造プロセス
- MPU-6050を搭載したArduinoジャイロスコープゲーム
- Unopad-Abletonを搭載したArduinoMIDIコントローラー
- サーボモーター付きロボット回避障害物
- Arduinoを搭載したシンプルな障害物センサー
- Arduino Nano:ジョイスティックで2つのステッピングモーターを制御
- Arduino制御ピアノロボット:PiBot
- ArduinoNanoを搭載したハンドヘルドガイガーカウンター
- Arduinoで音楽を作る方法
- Arduinoベースの自動ドア開口部の作り方
- AndroidアプリでArduinoロボットアームを制御する
- Dabbleを使用して制御されたArduinoで作られた4輪ロボット