


パーキンソン病患者のための補助スプーン
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
概要
パーキンソン病は、運動に影響を与える進行性の神経系障害です。症状は徐々に始まり、片手でかろうじて目立つ震えから始まることもあります。振戦は一般的ですが、障害は一般的にこわばりや動きの鈍化を引き起こします。
パーキンソン病の初期段階では、顔にほとんどまたはまったく表情が見られない場合があります。歩くときに腕が振れない場合があります。あなたのスピーチは柔らかくなったり、不明瞭になったりするかもしれません。パーキンソン病の症状は、症状が時間とともに進行するにつれて悪化します。
パーキンソン病を治すことはできませんが、薬を服用すると症状が大幅に改善する可能性があります。時折、あなたの医者はあなたの脳の特定の領域を調節し、あなたの症状を改善するために手術を提案するかもしれません。
症状
パーキンソン病の兆候と症状は、人によって異なります。初期の兆候は軽度で見過ごされがちです。多くの場合、症状は体の片側から始まり、症状が両側に影響を及ぼし始めた後でも、通常はその側で悪化し続けます。
パーキンソン病の兆候と症状には次のものが含まれます:
- 震え。 震え、または震えは、通常、手足、多くの場合、手や指から始まります。親指と人差し指を前後にこすることがあります。これは、ピルローリング振戦として知られています。静止しているときに手が震えることがあります。
- 動きが遅い(動作緩慢)。 時間が経つにつれて、パーキンソン病はあなたの動きを遅くし、単純な作業を困難で時間のかかるものにする可能性があります。歩くと歩幅が短くなることがあります。椅子から降りるのは難しいかもしれません。歩こうとすると、足を引きずることができます。
- 硬い筋肉。 筋肉のこわばりは、体のどの部分でも発生する可能性があります。筋肉のこわばりは痛みを伴い、可動域を制限する可能性があります。
- 姿勢とバランスの障害。 パーキンソン病の結果、姿勢が崩れたり、平衡障害が発生したりする可能性があります。
- 自動移動の喪失。 歩くときにまばたき、笑顔、腕を振るなど、無意識の動きをする能力が低下する可能性があります。
- スピーチの変更。 あなたは話す前に、柔らかく、速く、スラーまたは躊躇して話すかもしれません。あなたのスピーチは、通常の抑揚ではなく、単調なものかもしれません。
- 書き込みの変更。 書きづらくなり、小さく見える場合があります。
参照 :https://www.mayoclinic.org/diseases-conditions/parkinsons-disease/symptoms-causes/syc-20376055
<図>
プロジェクトのインスピレーション
私たちは、まさにこの目的のために販売されている製品であるLiftware Steady(https://www.liftware.com/steady/)に大きな影響を受けました。
私たちのプロジェクトの目標は、既成のコンポーネントを使用して同様のプロジェクトを構築することで発生する可能性のあるシステムダイナミクスと傾向を理解できるようにすることでした。
初期設計のアイデア
これはやりがいのあるプロジェクトであり、私たちが実用的な知識を持っていたモーションコントロール、物理学、3D数学の分野でチームを連れて行くことが期待されていることを早くから認識し、このプロジェクトは私たちの理論を実践するのに役立ちました。
デザインは手に持って、人の手が感じた震えを打ち消すのに役立つことが期待されていたので、プロトタイプの最後に持っていたスプーンを水平にして安定させることができました。
<図>
 <図>
<図> 
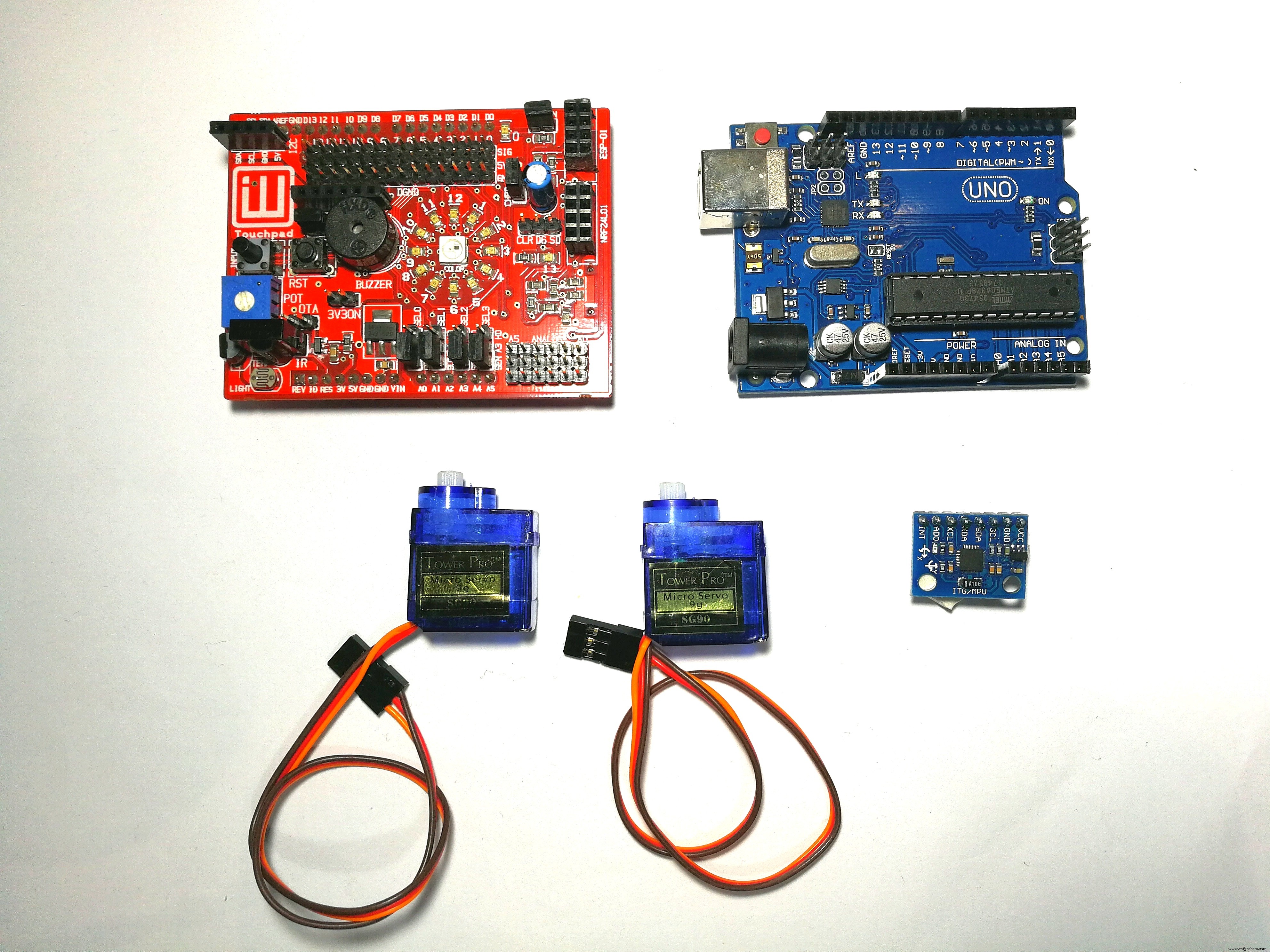
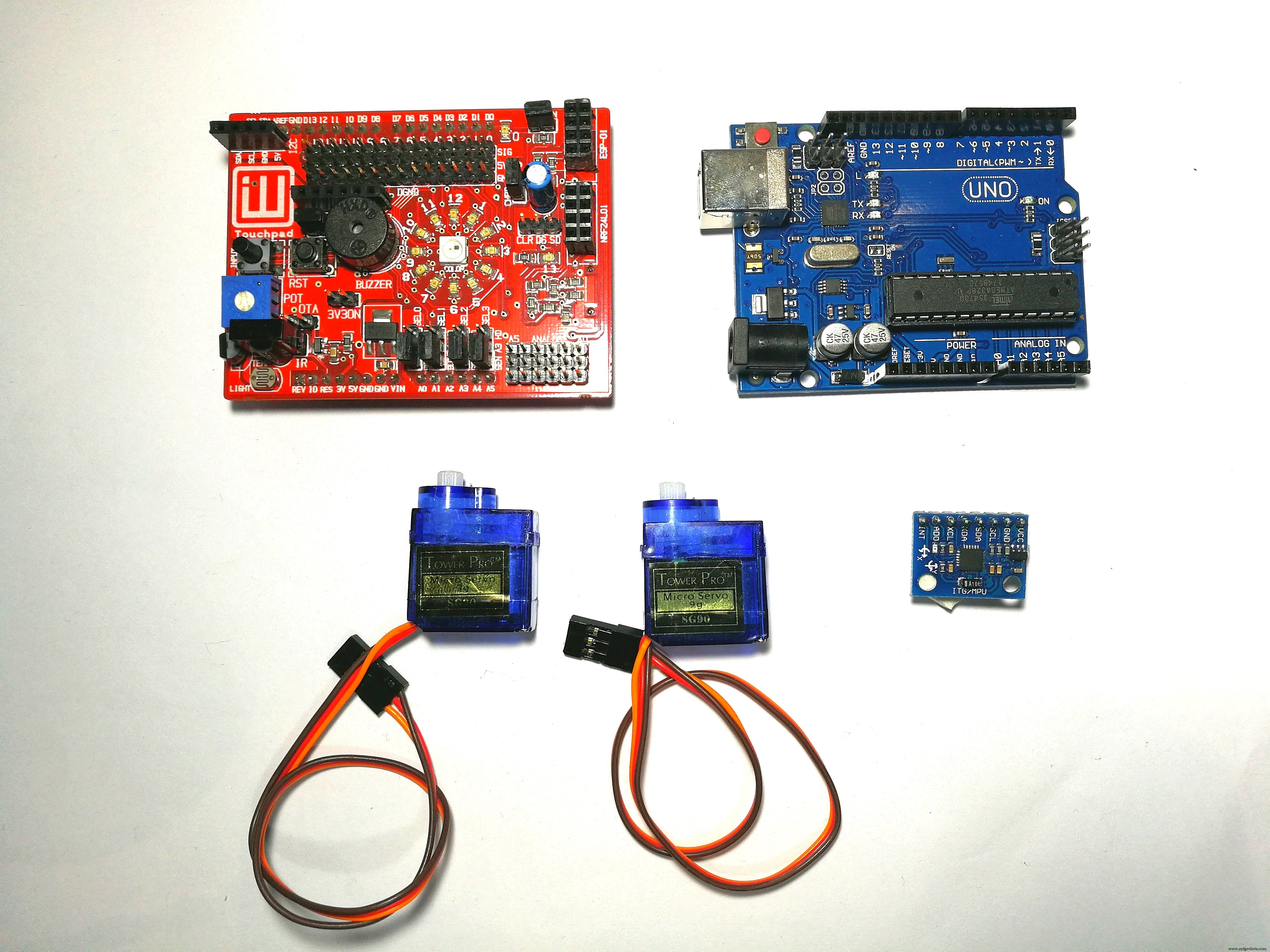
必要に応じて、傾き、加速度、相対および絶対を測定できる何らかのセンサーを使用する必要があることは明らかでした。幸い、InvensenseのMPU6050は、過去に使用したモジュールであり、私たちが望んでいた動的応答(測定速度)を提供できると確信していました。
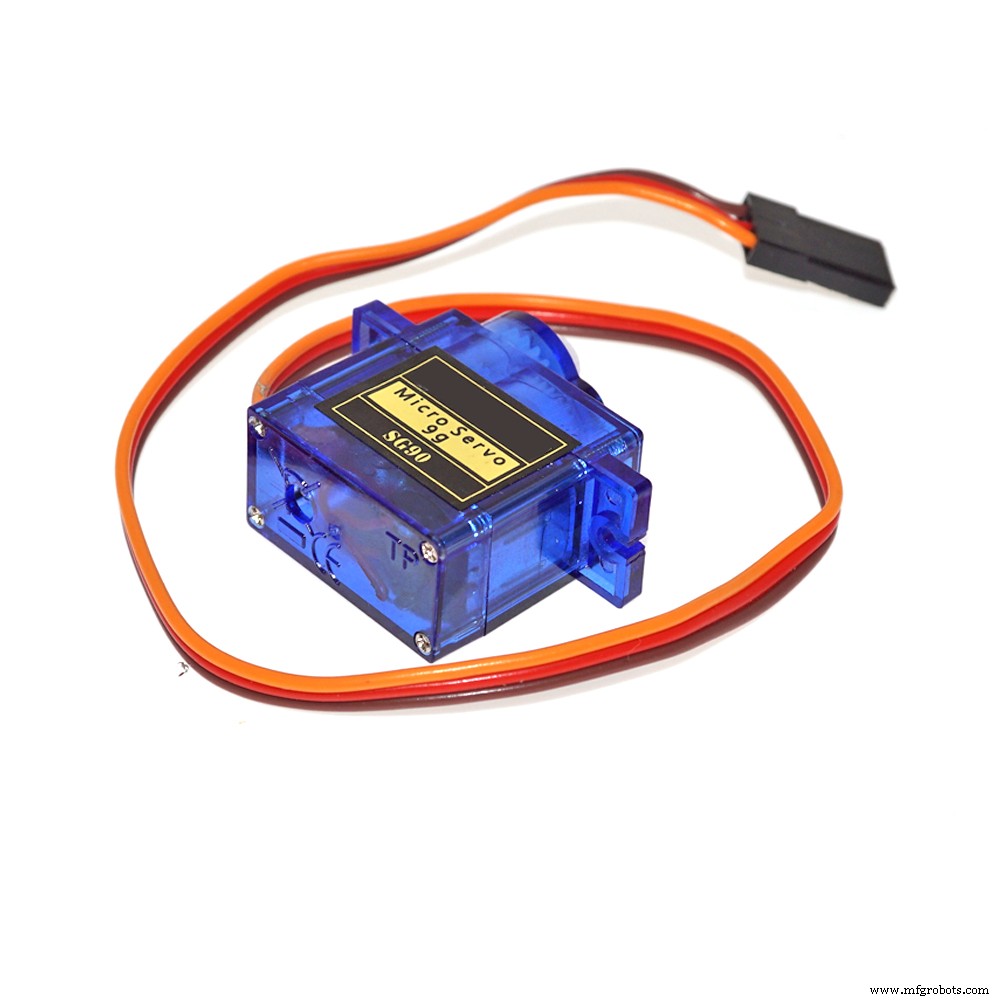
スプーンを十分速く正確に動かすことができる必要があり、ホビーサーボが使用できることを理解しました。これらは適度に速い応答を持ち、良好なトルクを提供できます。
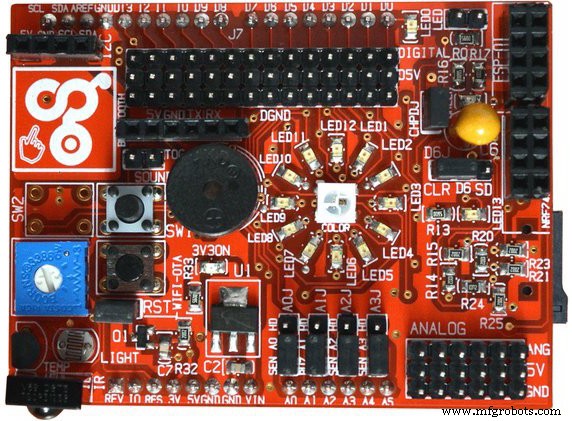
私たちはIdiotwareShieldのメーカーであり、プロジェクトで使用するのは当然の選択でした。そのため、すべての配線とハードウェア構成を5分で実行できました。
プロジェクトを構築する手順
<図>
 <図>
<図>  <図>
<図> 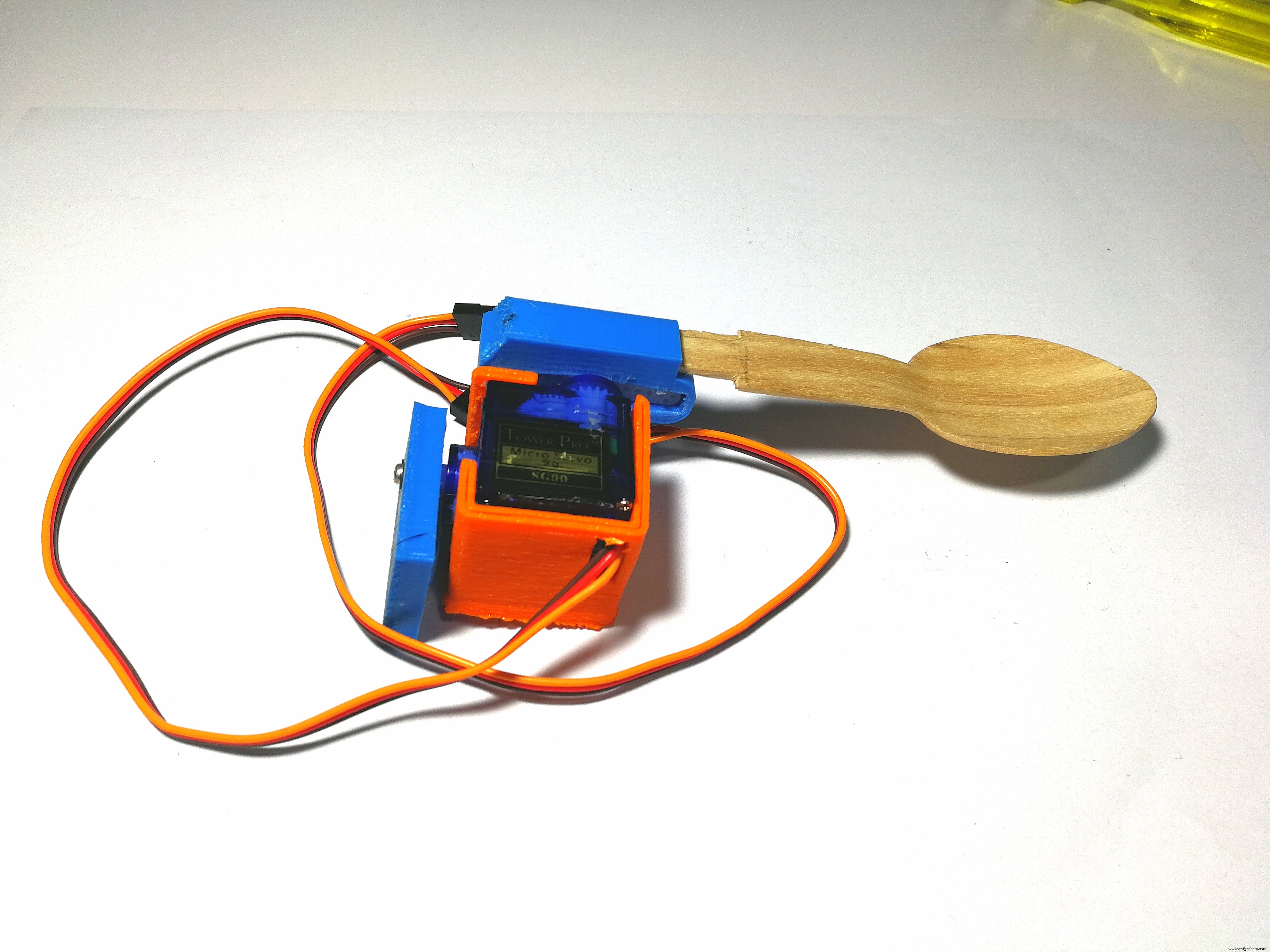 <図>
<図> 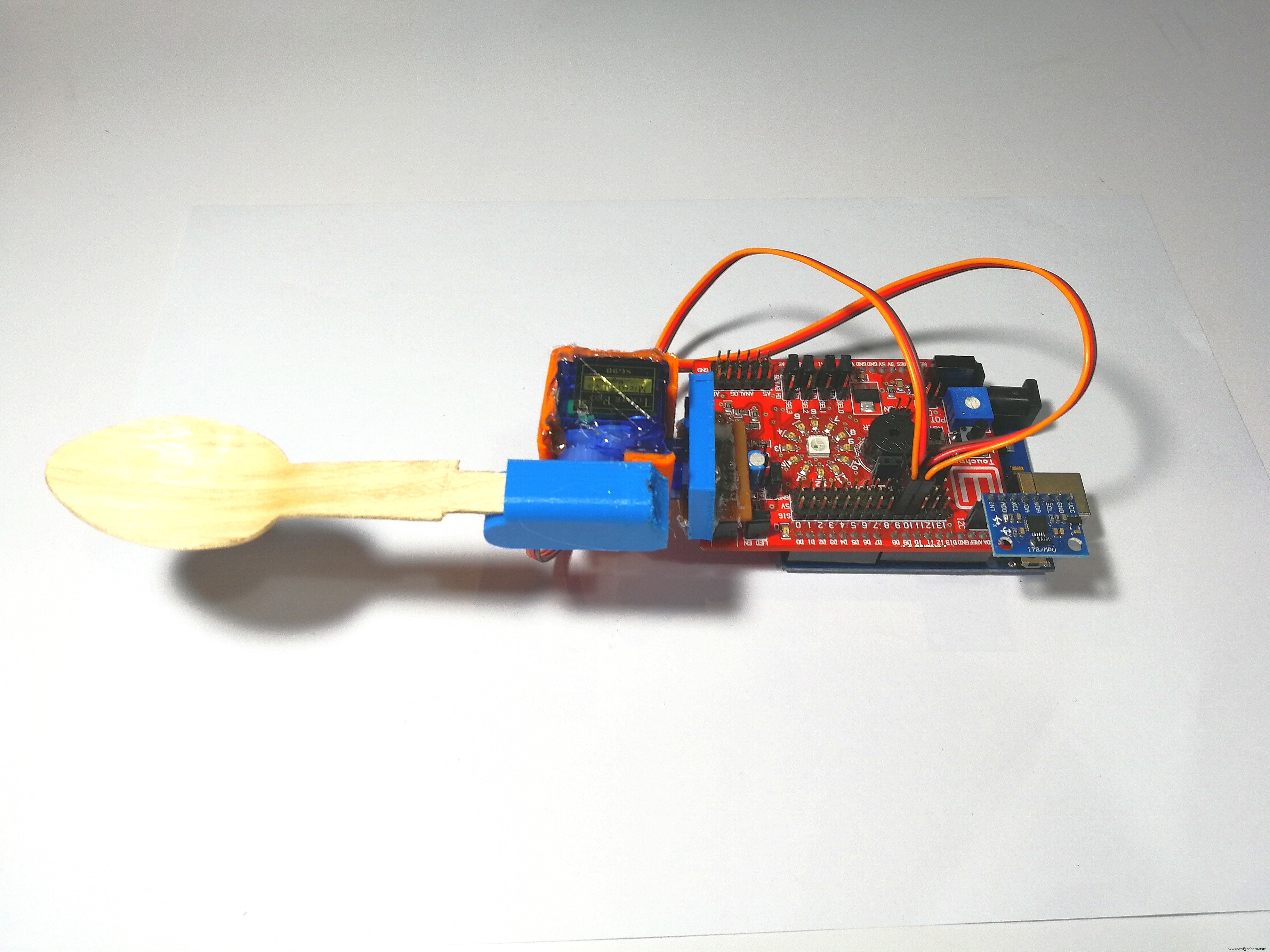 <図>
<図>  <図>
<図> 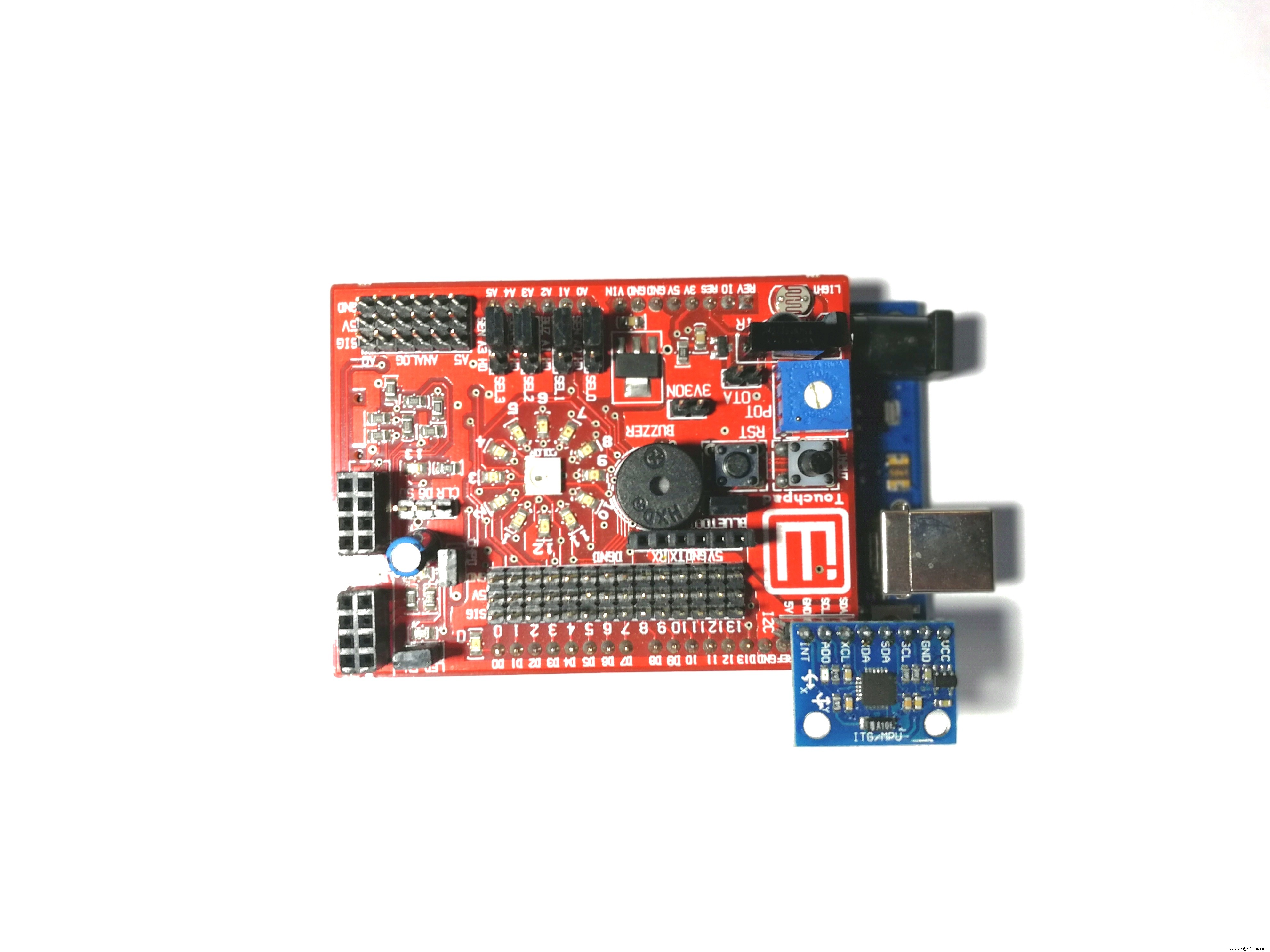 <図>
<図> 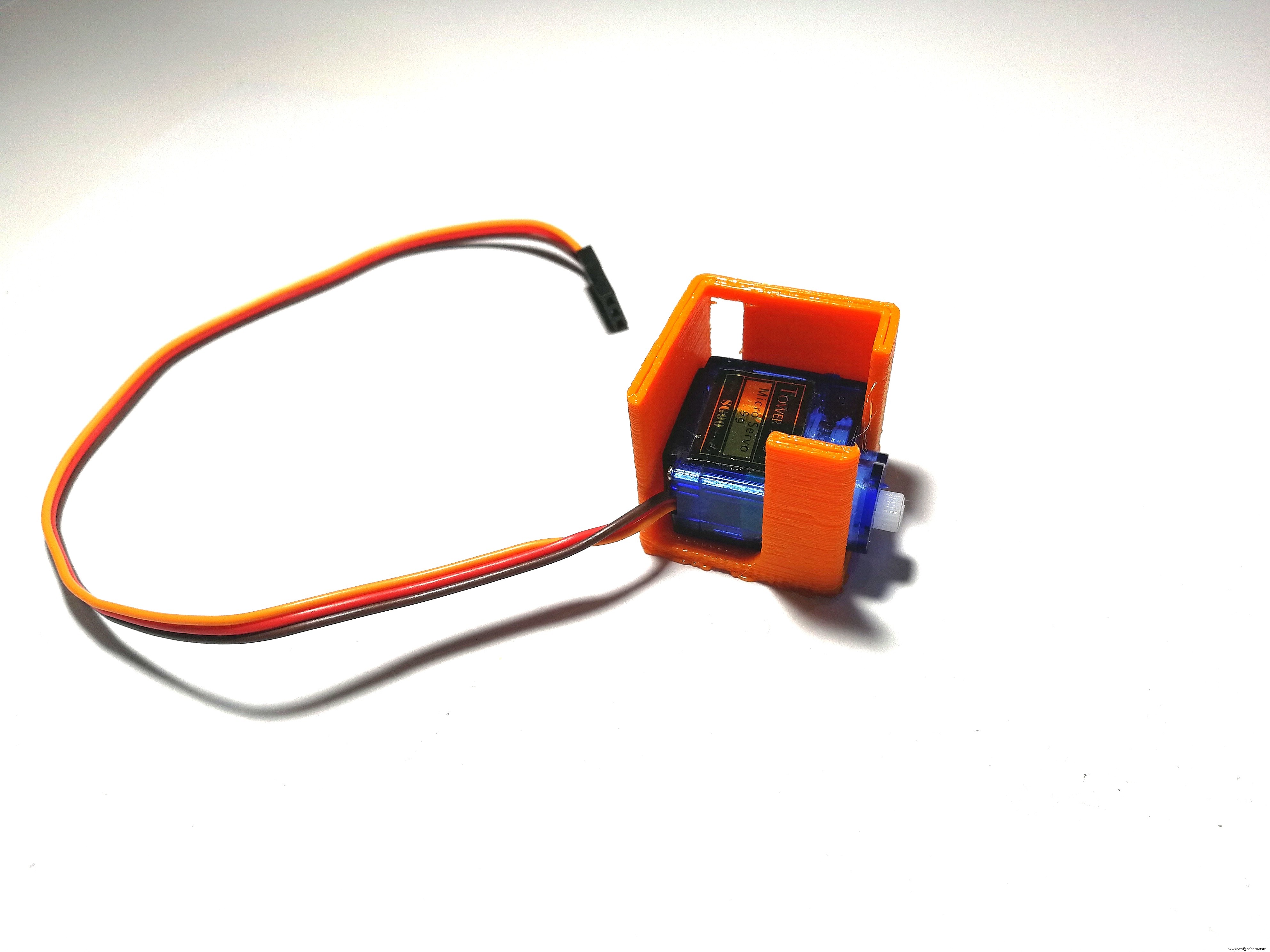 <図>
<図> 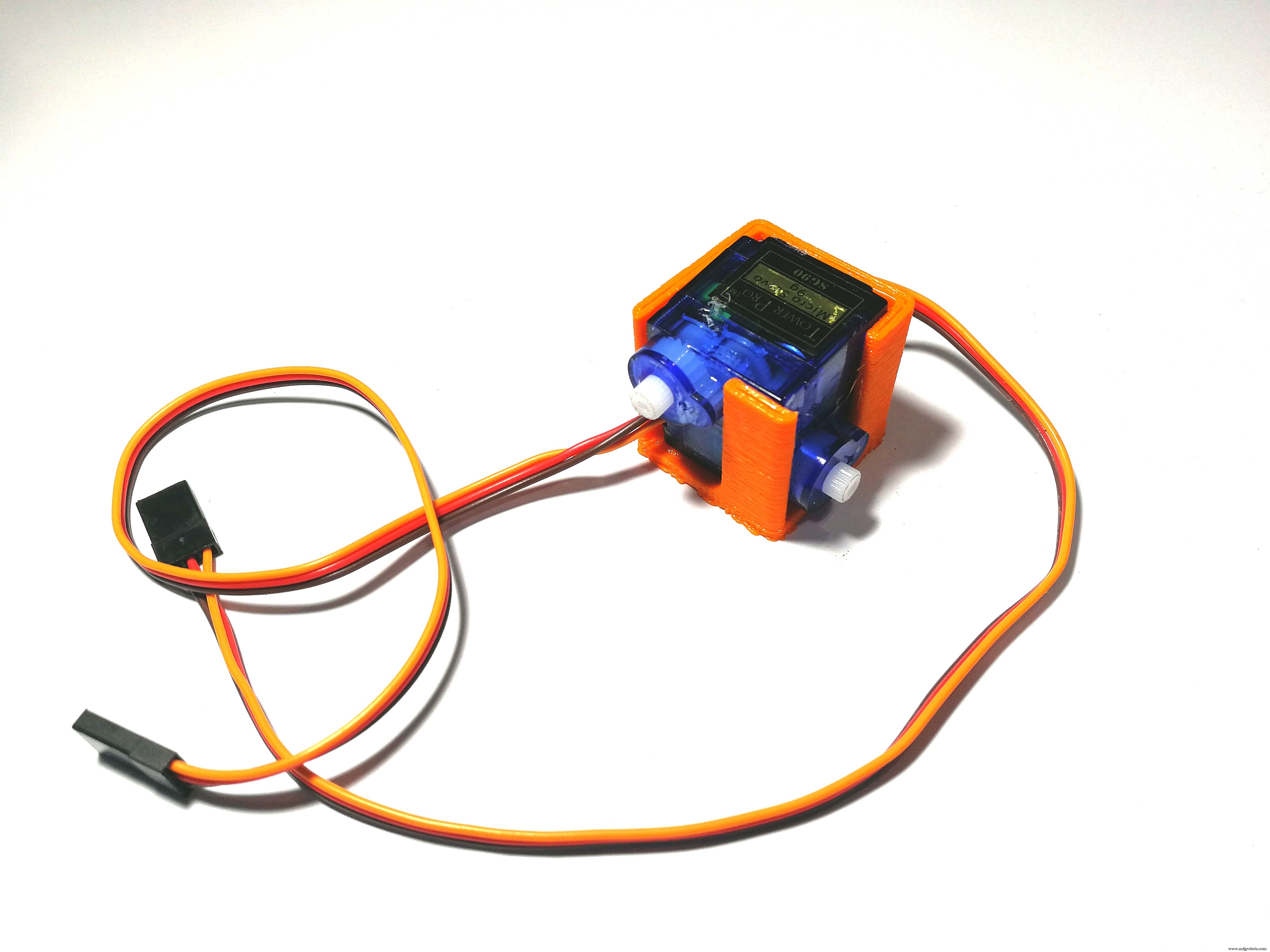 <図>
<図> 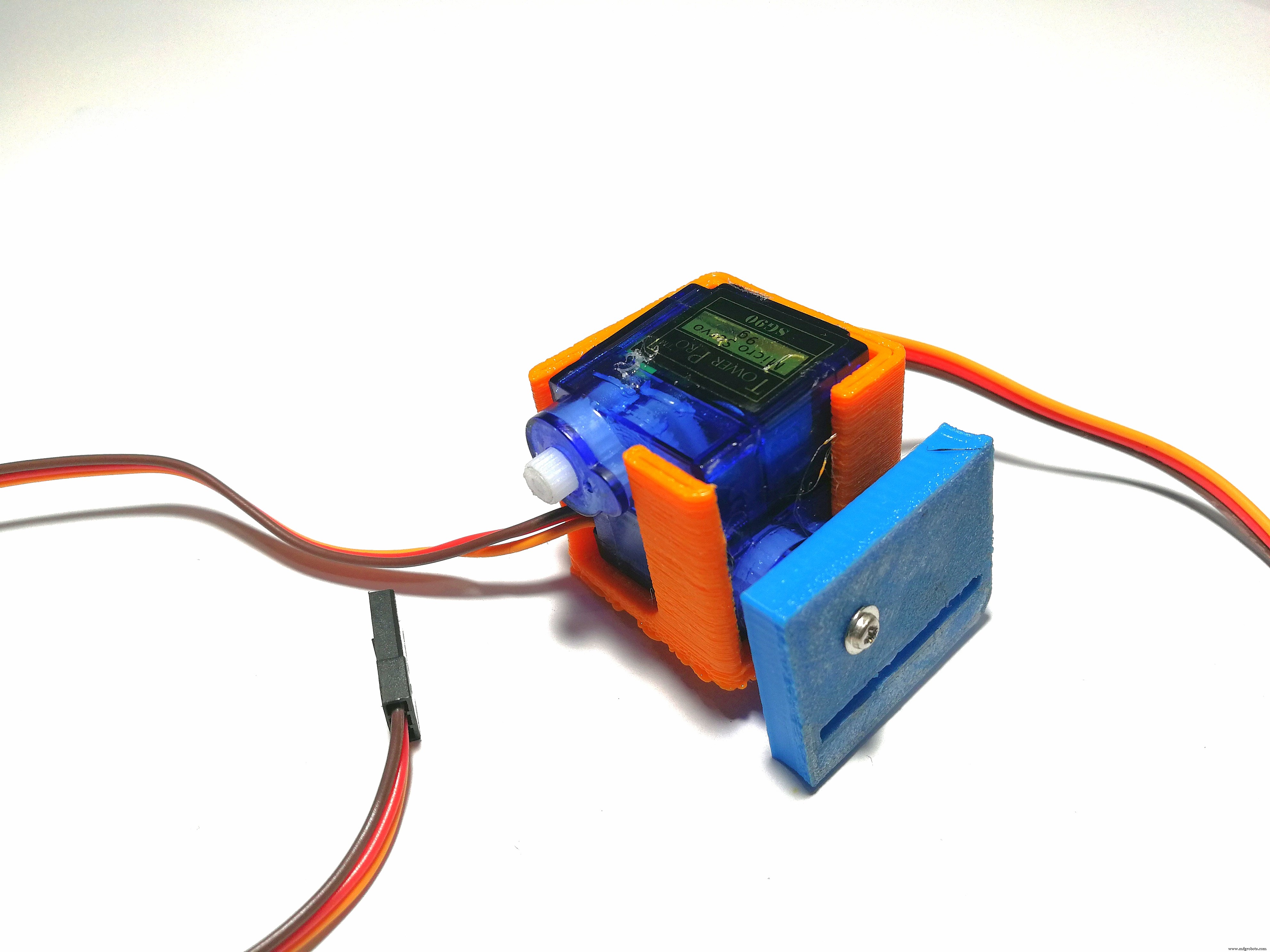 <図>
<図> 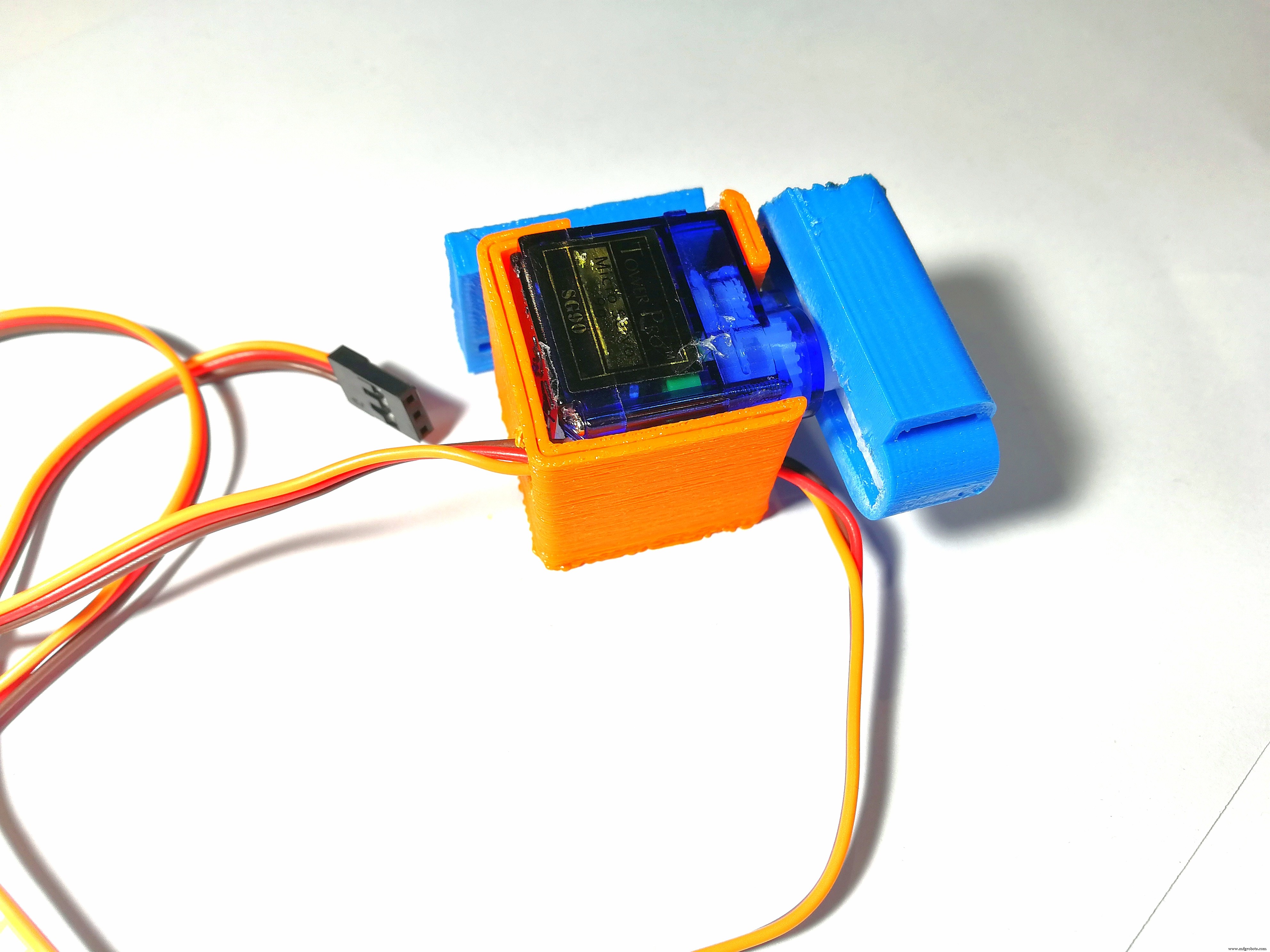 <図>
<図> 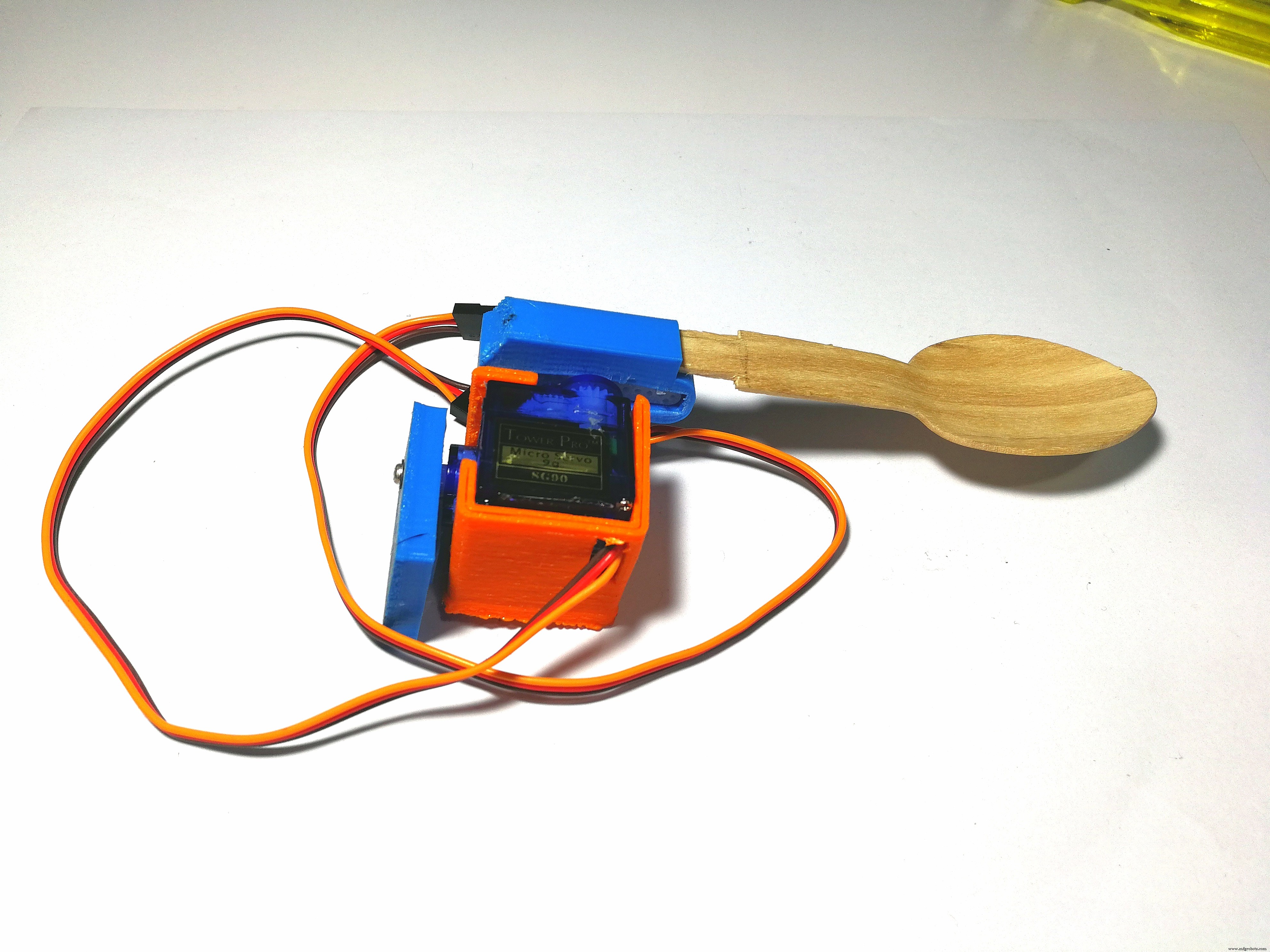 <図>
<図> 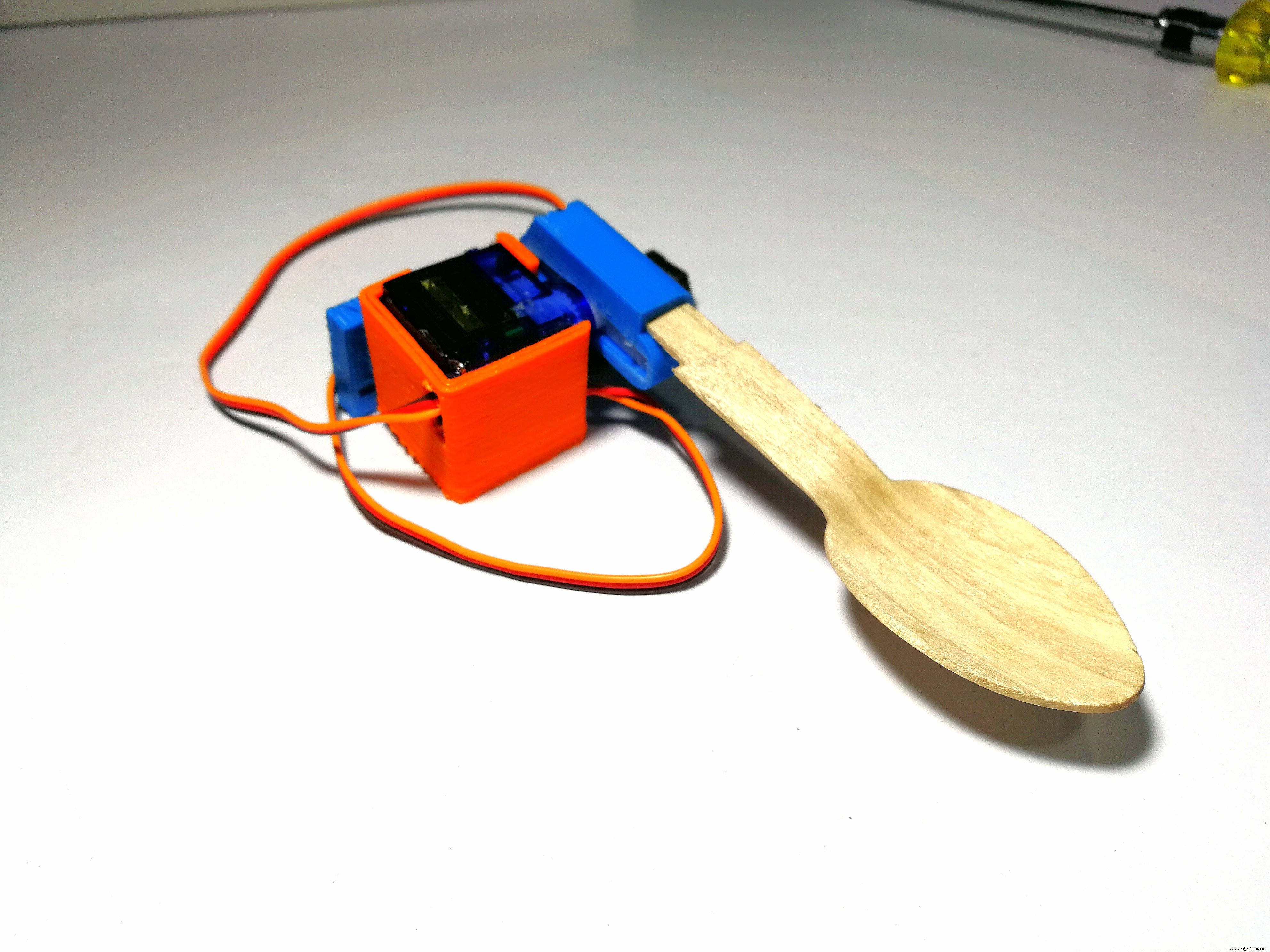 <図>
<図> 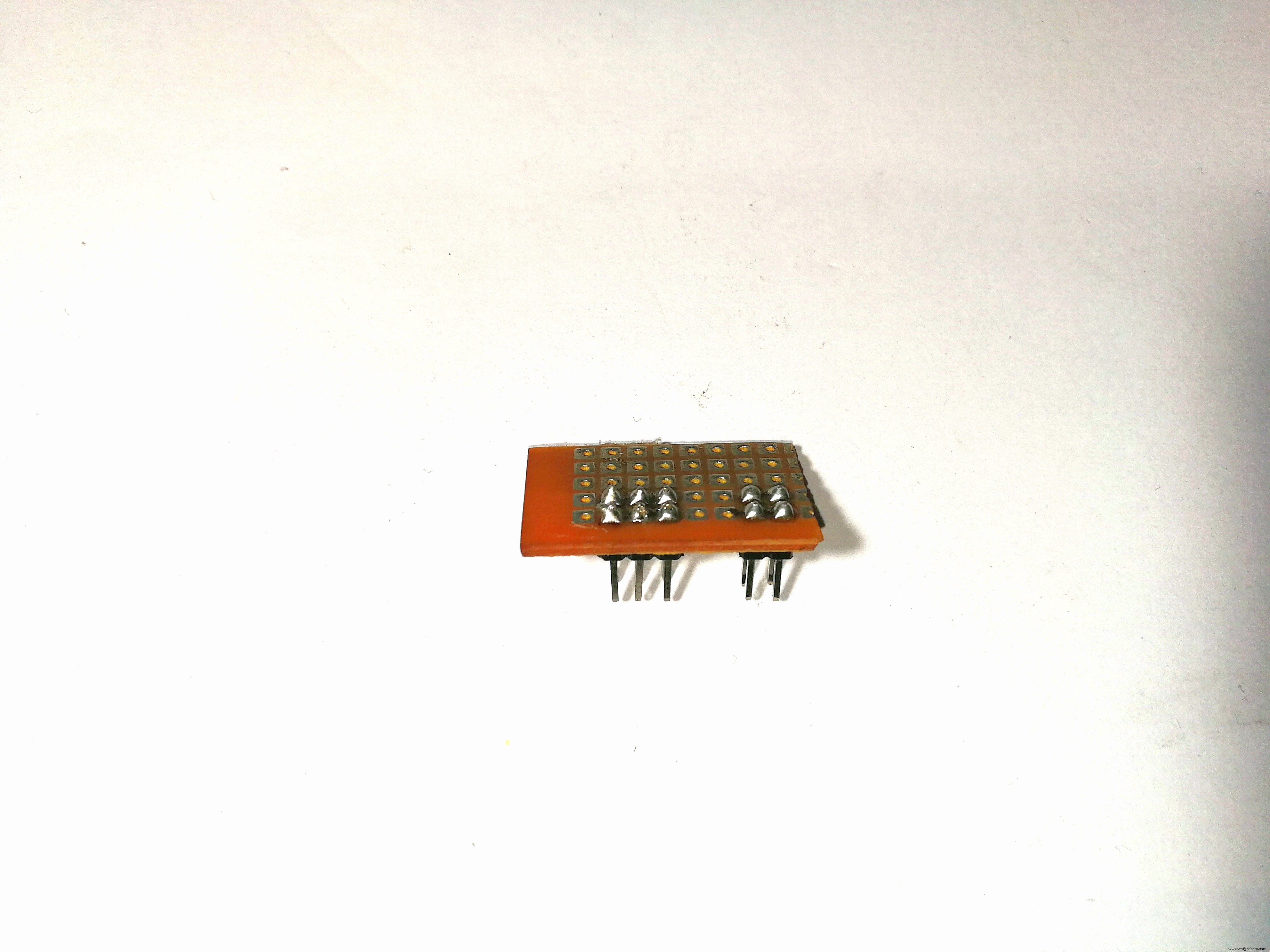 <図>
<図> 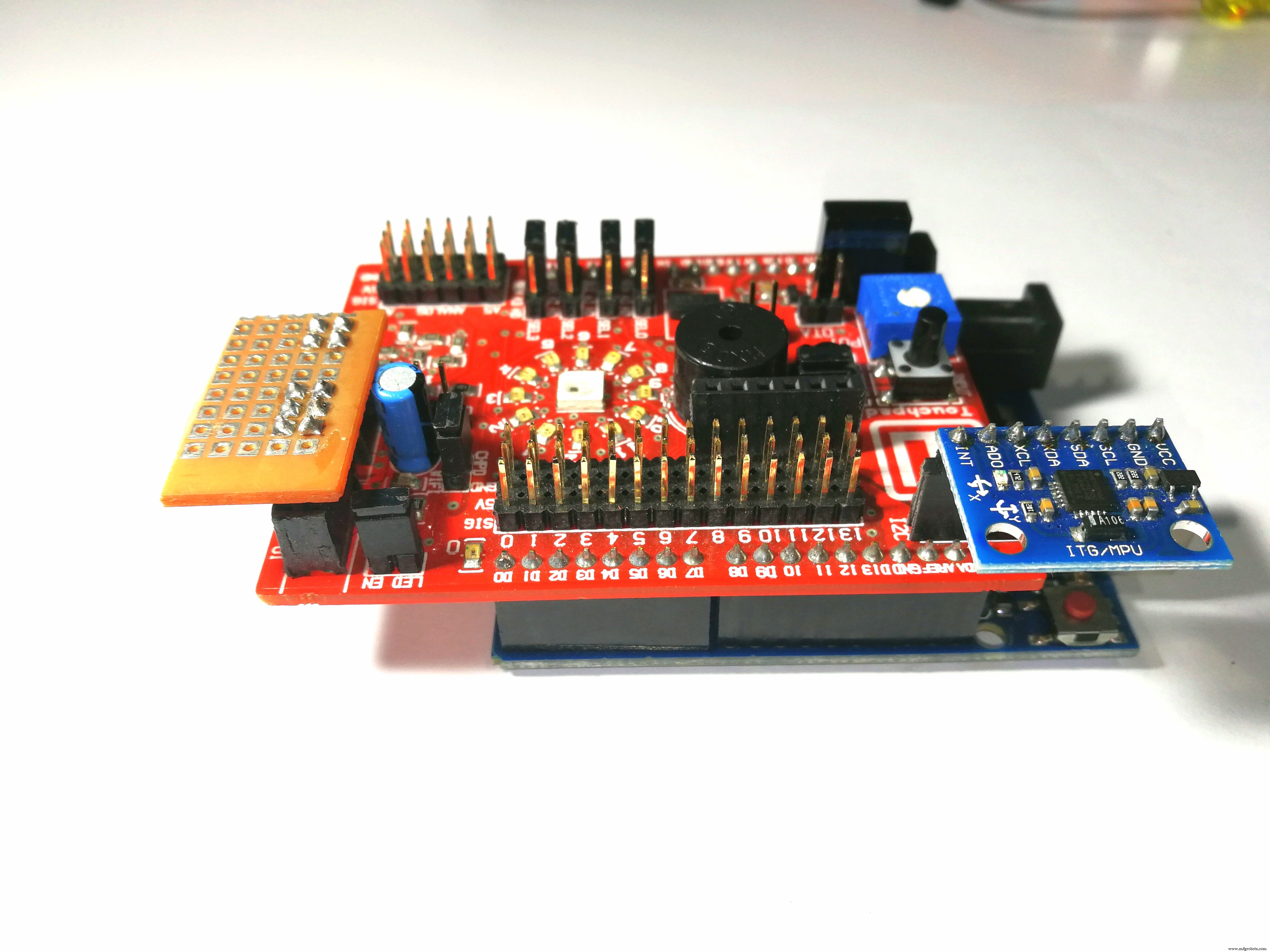 <図>
<図> 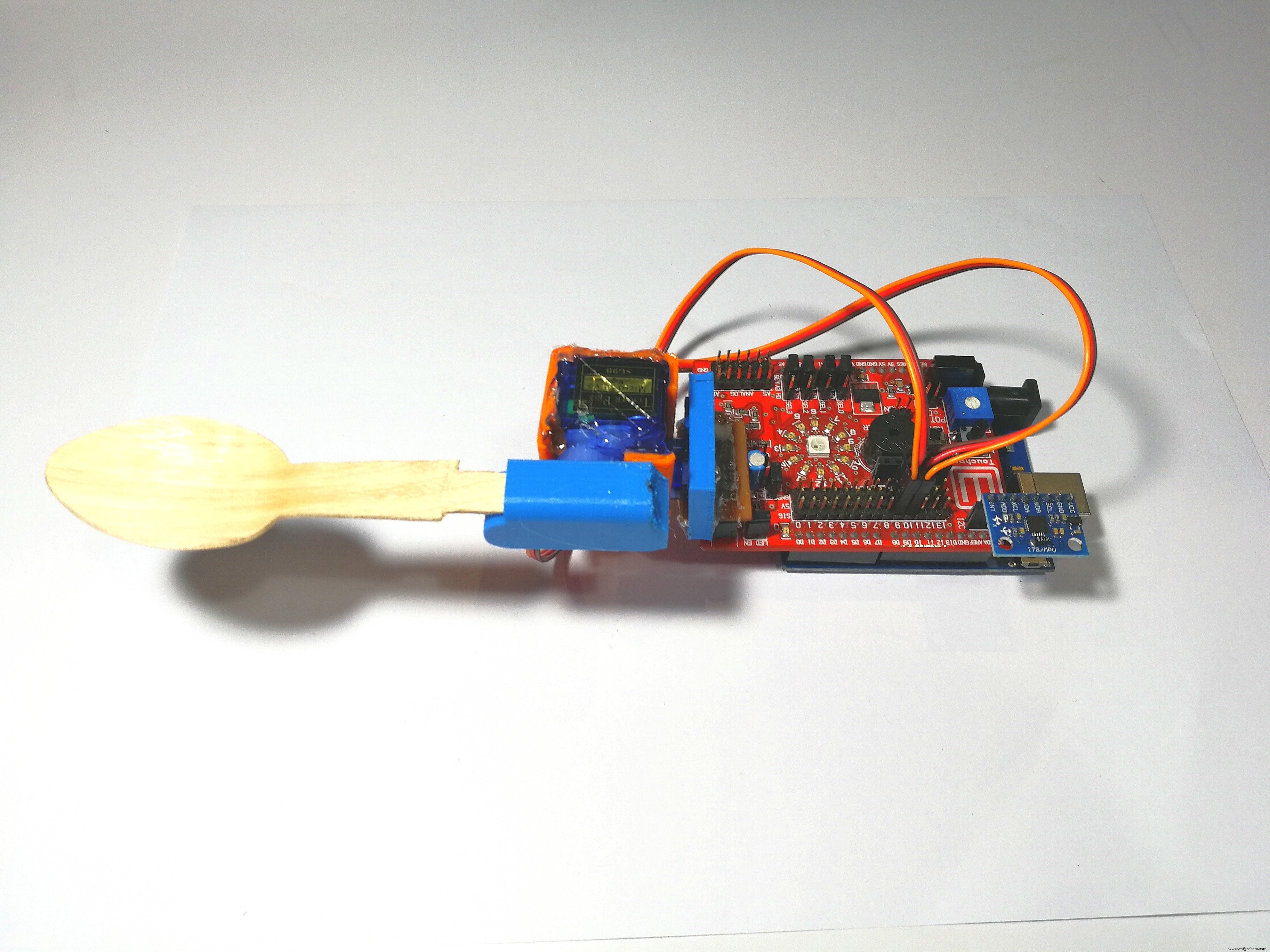 <図>
<図>  <図>
<図> 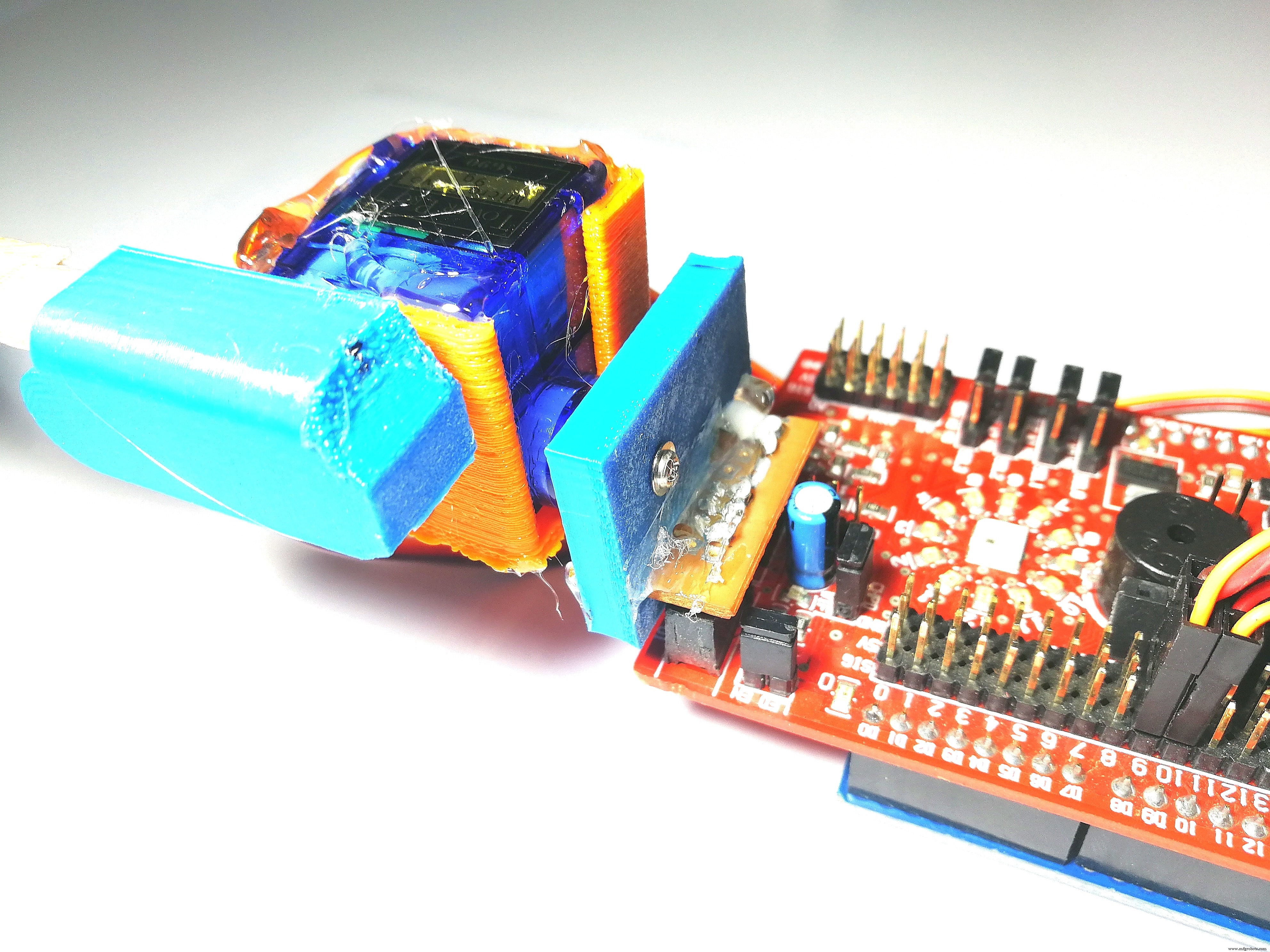 <図>
<図> 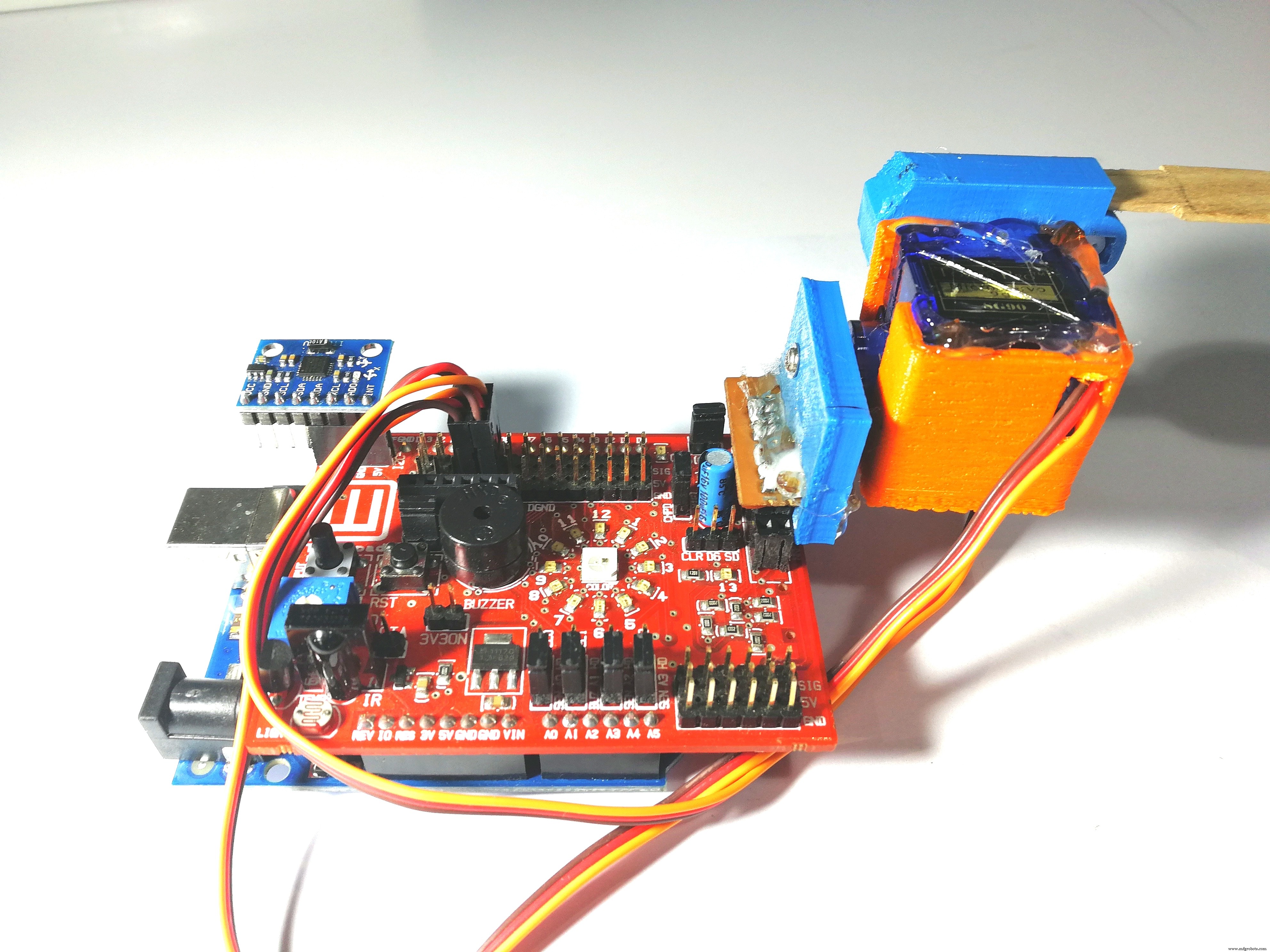 <図>
<図> 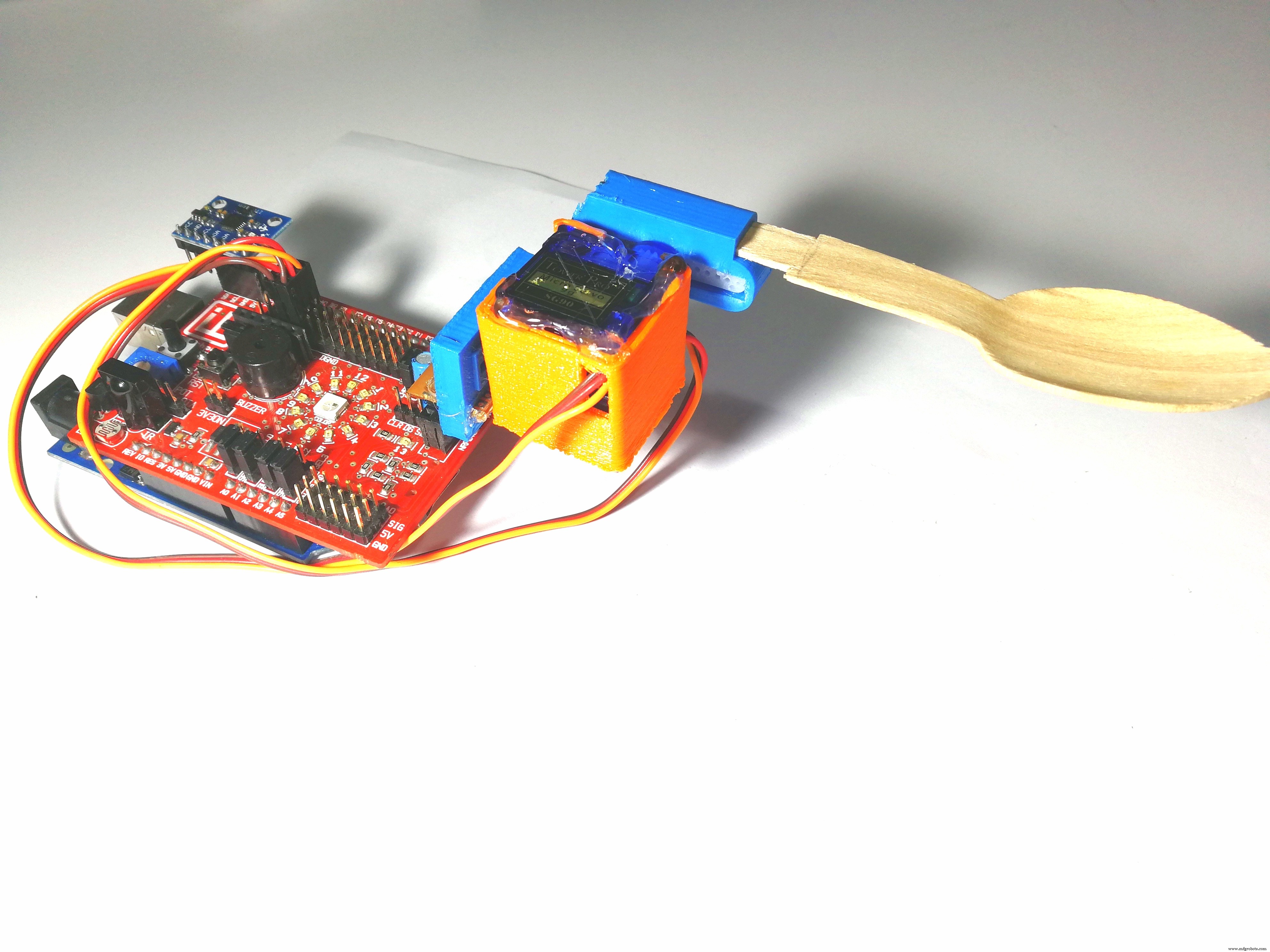
デモンストレーション
数日で、最初にMPU6050センサーの値を把握し、2つのサーボモーター(軸が直交して配置されている)と2つの3Dプリントを使用してカスタムの2軸回転メカニズムを構築することができました。
今後の展望
私たちの最初の質問は、最初のプロトタイプでうまく答えられました。速度と応答に関するいくつかの仮定は、実際に見たものに近いものでした。
- 手作業で配線したPCB上のATtiny / ATmega328ベアボーンを使用して、プロトタイプをさらに小さくします
- サーボをより厳密に修正する
- プロジェクトを実行するために18650バッテリーを入れてください
プロジェクトとプロジェクトページの更新を受け取るためにサブスクライブします。
コード
パーキンソン病患者用スプーン
支援技術のコードhttps://github.com/CuriosityGym/spoonForParkinsonPatients製造プロセス