


ArduinoNanoで制御されるスポット溶接機
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
| |||
|
このプロジェクトについて
このプロジェクトでは、私の 父と 私 改善のためにショットを取っています 独自のスポット溶接機 どちら 私たち 約2年前に開始されました。このウェブサイトではあまり話題にならないかもしれませんが、私たちはそれを作るのを楽しんで、それから多くを学びました。よろしくお願いします。
このプロジェクトで取り上げていること
溶接機のArduino部分のみを取り上げます。これは単純で、非常にうまく機能し、溶接機自体の基本的な仕様もいくつか示します。 YouTubeや電子フォーラムには、溶接工の製造プロセスをカバーする多くのturorialsがあり、それが私たちも学んだ方法です。
スポット溶接機とは何ですか?
これは、金属間の小さなスポットに大電流を流すデバイスです。 、こうしてそれらに会い、発生する熱からそれらを一緒に結合します。このプロセスは数ミリ秒続き(溶接する金属によって異なります)、デバイスに高電力が必要です。これは、スポット溶接機の主な機能です。非常に短時間で高電力を供給します。
この電流を供給するために、銅合金電極が使用されます。
このプロセスが続く時間を決定する方法は?
私の意見では、溶接時間に関しては基準がありません。私と私の父は、私たちの経験を使用して、良好な溶接に十分なミリ秒数を決定するだけですが、この時間は、溶接機の能力と結合しようとしている金属の厚さを考えると、簡単に計算できます。
コンポーネント/基本仕様 <図>
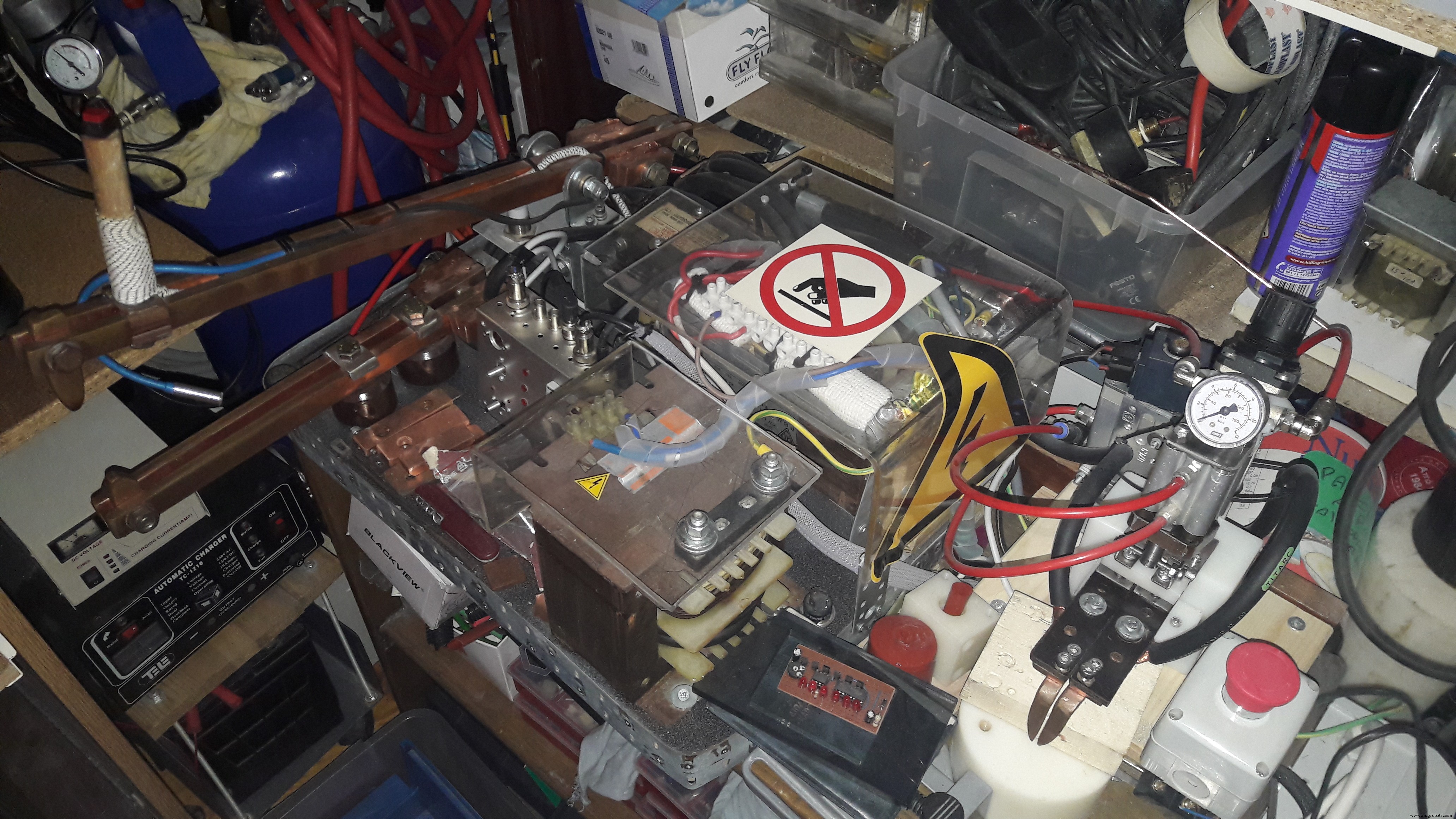
4x1.5kWの変圧器を使用しています 溶接に必要な電力を提供します。これにより、理論上の電力は6kWになります。これらの変圧器は、トラックのバッテリー充電器から入手しました。溶接機で使用できるようにするには、2次巻線を取り外し、溶接ケーブル( CH01N2-D )を2本追加する必要があります。 )そしてすべての変圧器を並列に接続します。それらは同じ位相を共有する必要があります。そうしないと、回路が短絡します。溶接機には2つの溶接方法があります:
- 従来の銅電極(画像1の左側)。
- 「クモの歯」:電池を溶接するために使用されるアドオンで、加圧空気で機能します(画像1の右側)。
コントロールボード <図>
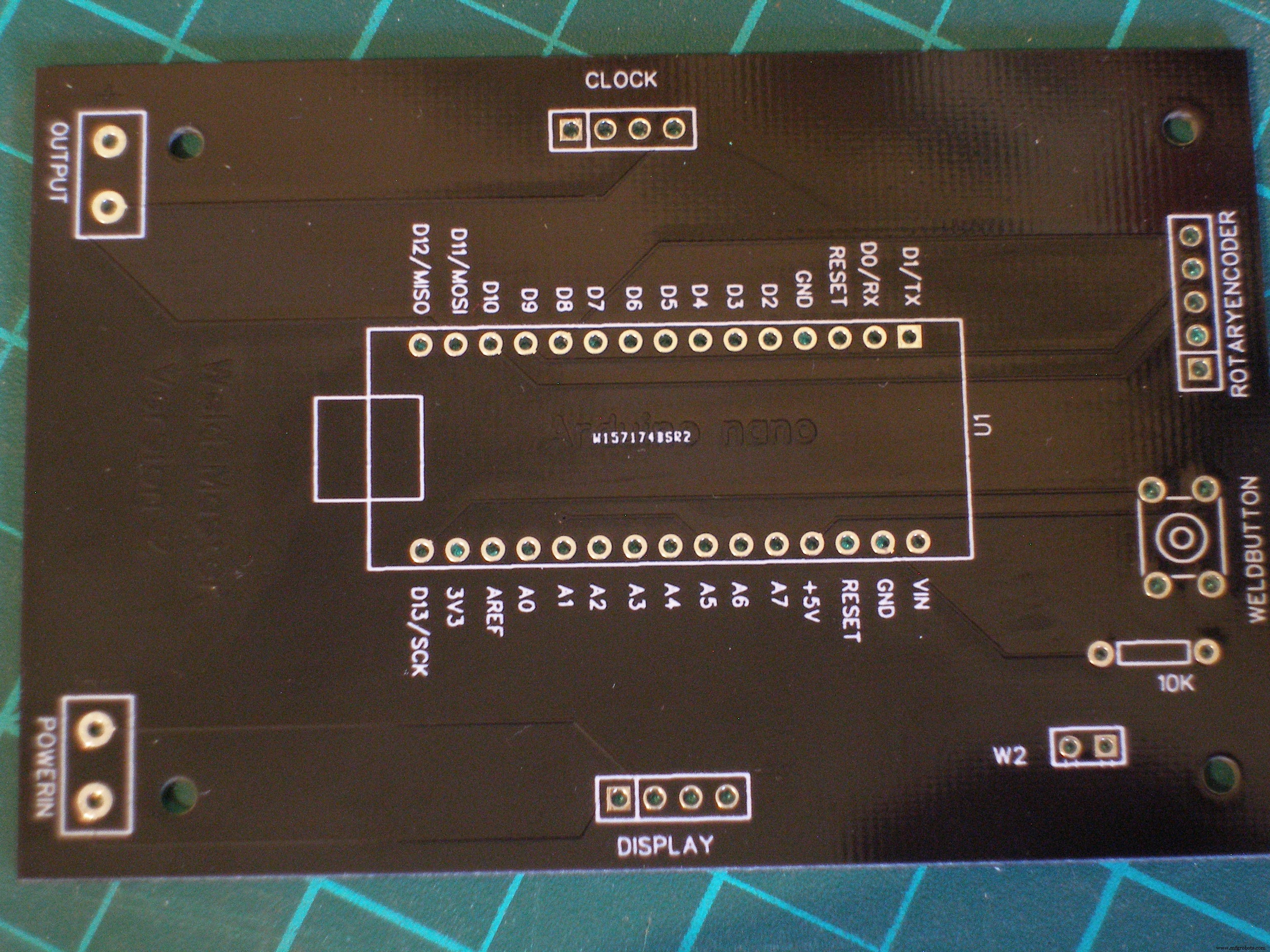
画像2に見られるように、私たちのボードは非常に理解しやすいです:
- Arduino Nanoが中心となり、ボード上で最もスペースが広くなります。
- DS3231リアルタイムクロックモジュールを使用して、日付/時刻を表示し、タイミングの目的にも使用します。 (ライブラリ:http://www.rinkydinkelectronics.com/library.php?id =73)
- 20x4 LCD画面を使用します。これは、はるかに使用されている16x2 LCDよりも多くの情報を収めることができます(以前のビルドで実際に使用しました。プロジェクトの説明の最後にある2番目のYouTubeビデオを参照してください)。ライブラリをダウンロードするためのリンクは次のとおりです:https://bitbucket.org/fmalpartida/new-liquidcrystal/downloads/。このプロジェクトでは1.3.5バージョンを使用しています。
- メニュー内を移動できるようにするために、ロータリーエンコーダーを使用します。これにより、スペースと複雑さが大幅に節約されます。
- 最後になりましたが、溶接ボタンとその10KΩ抵抗があります。
Nanoの出力は、ソリッドステートリレーをガイドするために使用できます。ソリッドステートリレーは、溶接機の残りの部分をガイドします。
<図>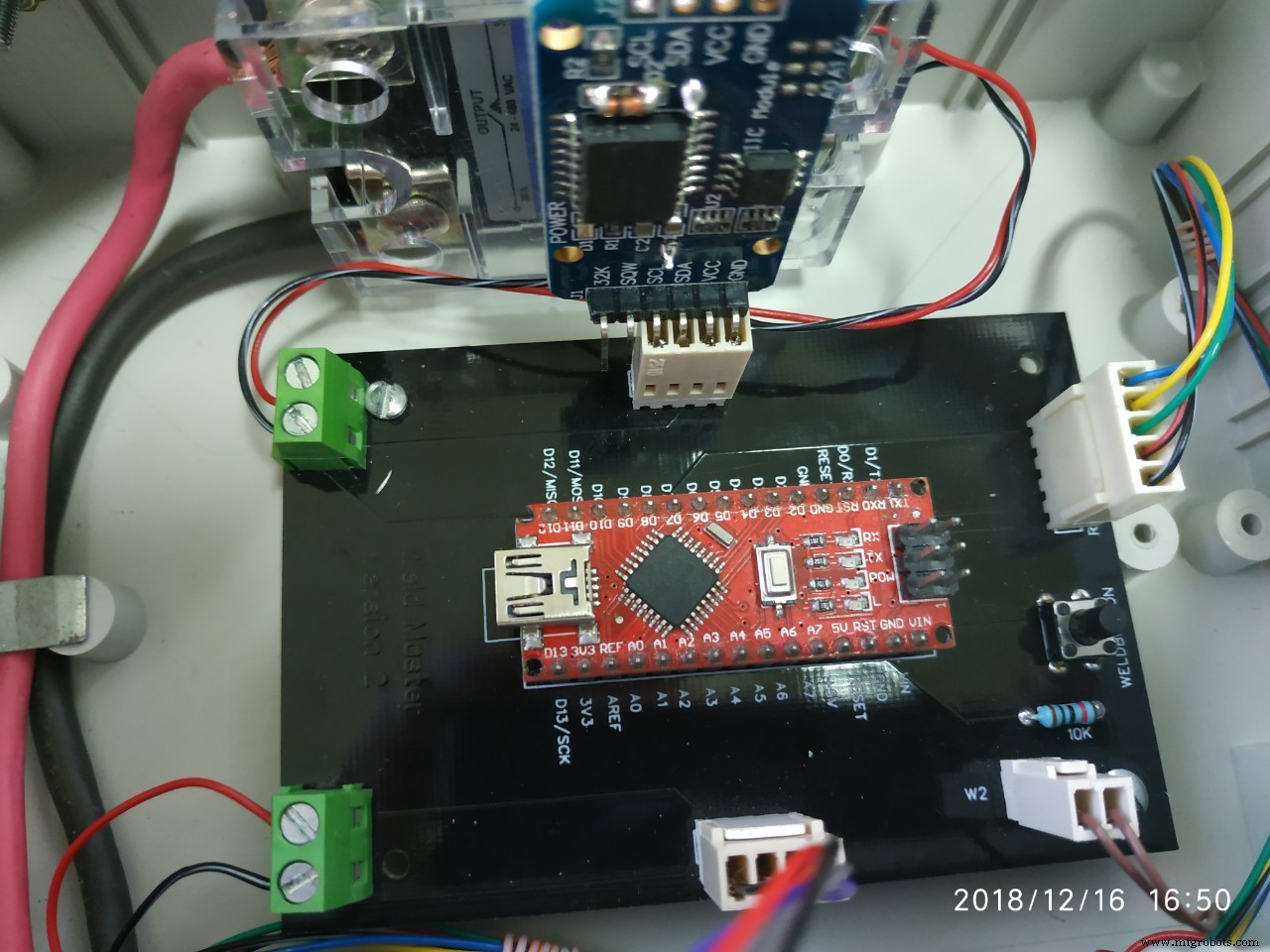
画像1に見られるように、回路は囲まれています。変更する必要はありません。ロータリーエンコーダーと押しボタンを使用するだけです。
プログラム
プログラムは非常にシンプルで正直なところ、プログラムの視覚的な魅力を損なういくつかの美的変更を修正するために作成されたものです。
ビデオ(タイムスタンプ:03:03-04:57)で説明されているように、Nanoがパワーを与えると、使用されるデフォルト値を確認できます。これらの値を変更するには、「オプションモード」に入る必要があります。そのためには、ロータリーエンコーダーの押しボタンを2秒間押す必要があります(ソースコードから好きなように変更できます)。そうしたら、「!」 LCDの右上隅に表示され、オプションモードに入ると自動的に消えます。
今後は、ロータリーエンコーダーを使用して、必要な値を編集できます。入力した値に満足したら、もう一度ロータリーエンコーダーを2秒間押して、溶接の準備が整います。
YouTubeビデオ
上のビデオでは、溶接機に関する詳細情報を入手して、実際の動作を確認できます。
古いビルド
以下のビデオでは、古いバージョンのスポット溶接機をテストしました。これは、電力が少なく、現在のビルドにある機能の一部が不足していました。溶接に関するヒントをいくつか紹介しているので、もっと見たい場合は良い眺めです。
(注:音声はギリシャ語ですが、英語の字幕もあります。)
ありがとう
時間を割いて私たちの作品をチェックしていただきありがとうございます。私たちはそれを作るのを楽しんだし、あなたもそれを見ていたことを願っています。また、使用したボードを後援してくれたPCBWayに大いに感謝します。それは大きな助けになりました。質問があれば忘れずに残して、他のプロジェクトもチェックしてください。良い一日を!
コード
プロジェクトのリポジトリ
プログラムを入手して、Arduinoボードにアップロードします。ボードを自分で注文したい場合に備えて、ガーバーファイルもアップロードされています。 https://github.com/SauROnmiKE/Master_Welder 回路図
LEDを希望の出力に交換し、好きなように使用してください。 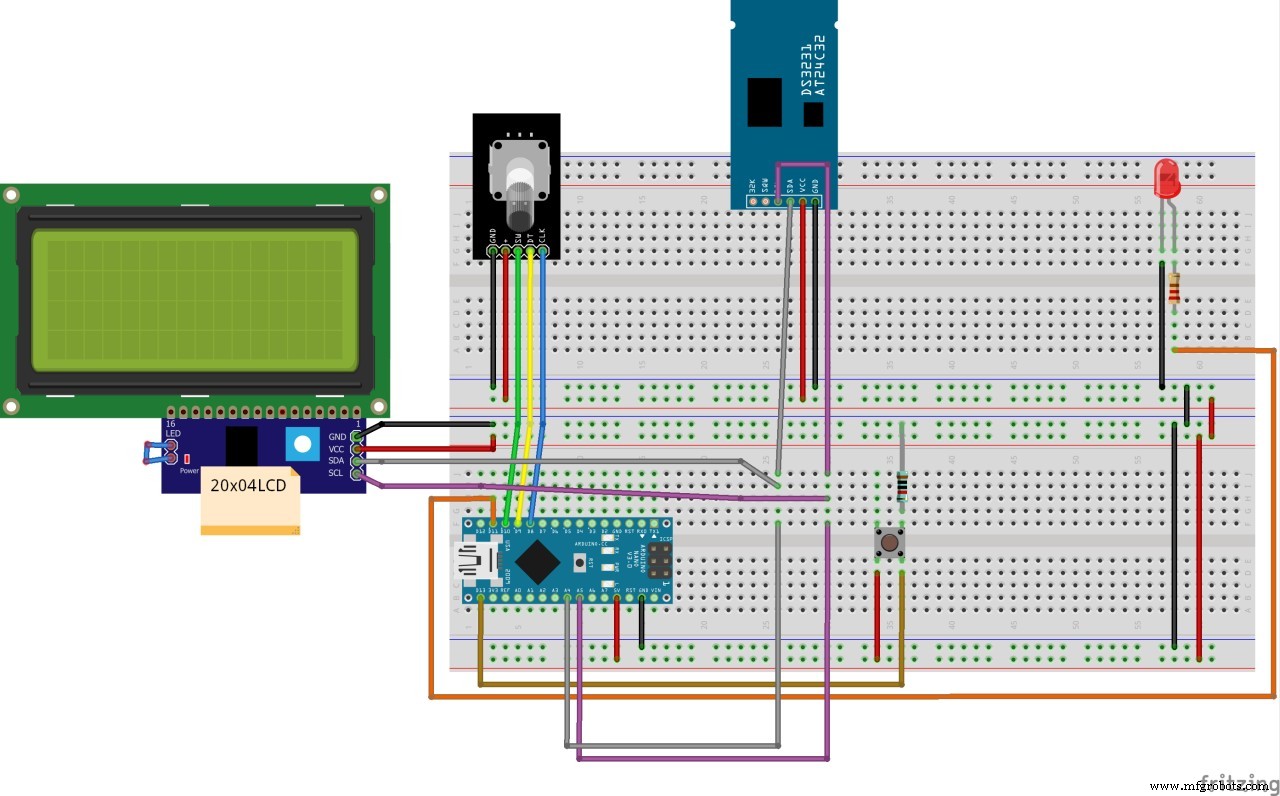
製造プロセス
- ArduinoとRaspberryPiを使用してインターネット制御のビデオストリーミングロボットを構築する
- Arduinoを使用したDIYの最もシンプルなIV9Numitron時計
- MPU-6050を搭載したArduinoジャイロスコープゲーム
- 自家製16x8マトリックス上のArduinoNanoTetrisゲーム
- Nunchuk制御ロボットアーム(Arduino付き)
- Arduino Nano:ジョイスティックで2つのステッピングモーターを制御
- MobBob:Androidスマートフォンで制御されるDIY Arduino Robot
- ロータリーエンコーダー付きDIYシンプル測定ホイール
- OKGoogleのBluetooth音声制御アプライアンス
- Arduino、Yaler、IFTTTを使用したIoTゲージ
- ArduinoNanoを搭載したハンドヘルドガイガーカウンター