


視覚障害者のための第三の目
コンポーネントと消耗品
>  |
| × | 5 | |||
| × | 5 | ||||
| × | 5 | ||||
| × | 5 | ||||
 |
| × | 5 | |||
 |
| × | 5 | |||
 |
| × | 5 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 4 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
必要なツールとマシン
>  |
| |||
 |
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
<図>
 <図>
<図> 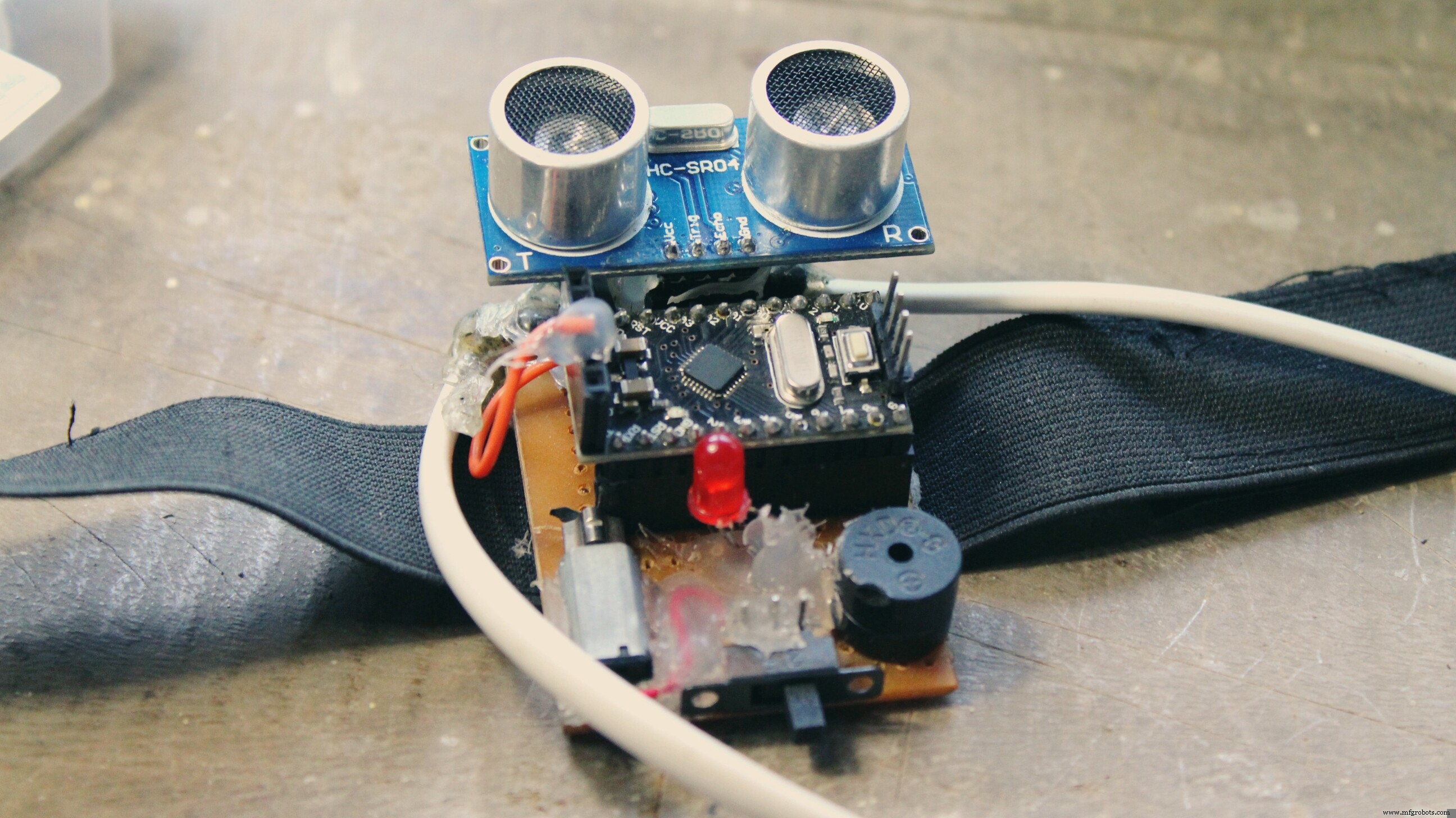 <図>
<図> 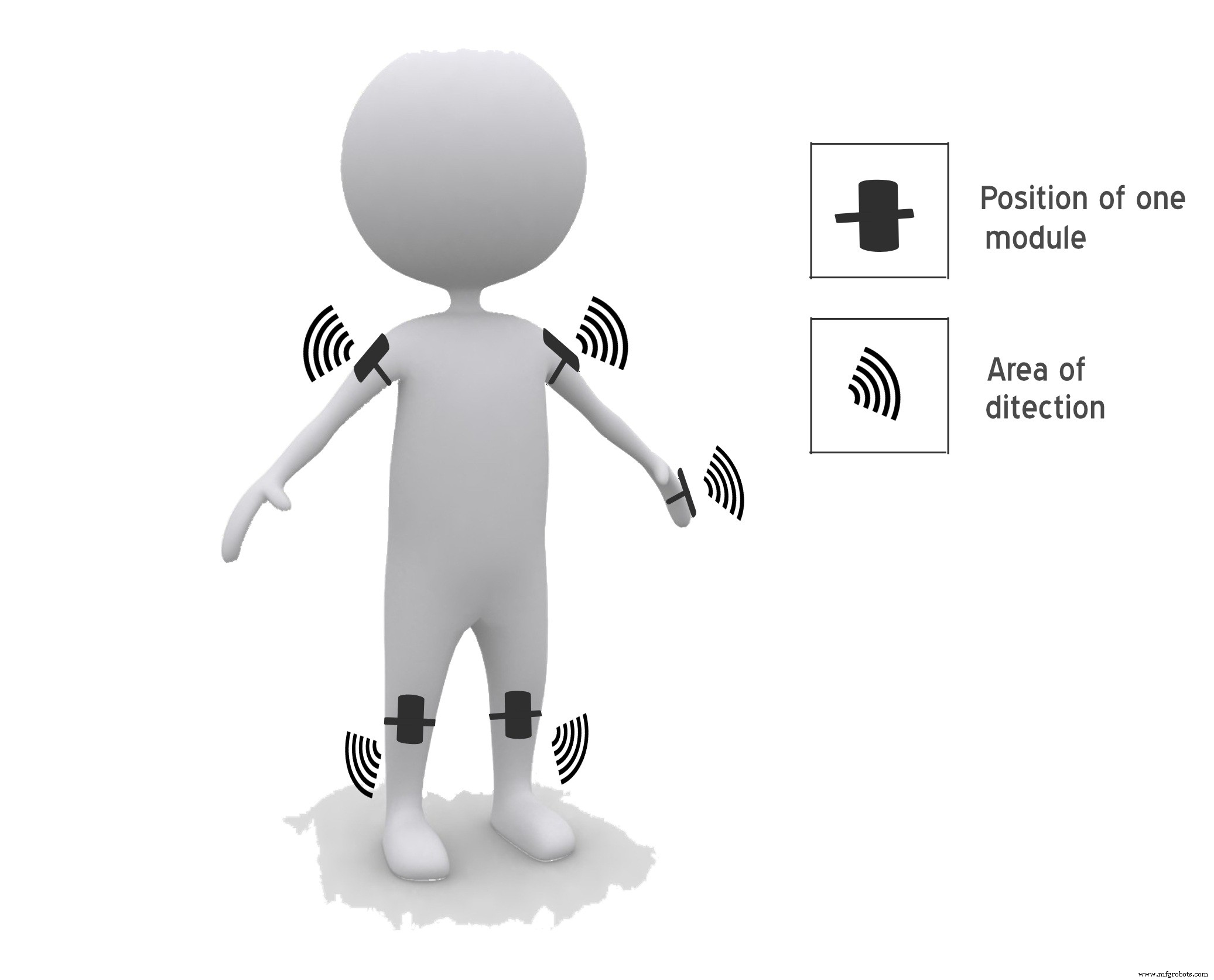 <図>
<図> 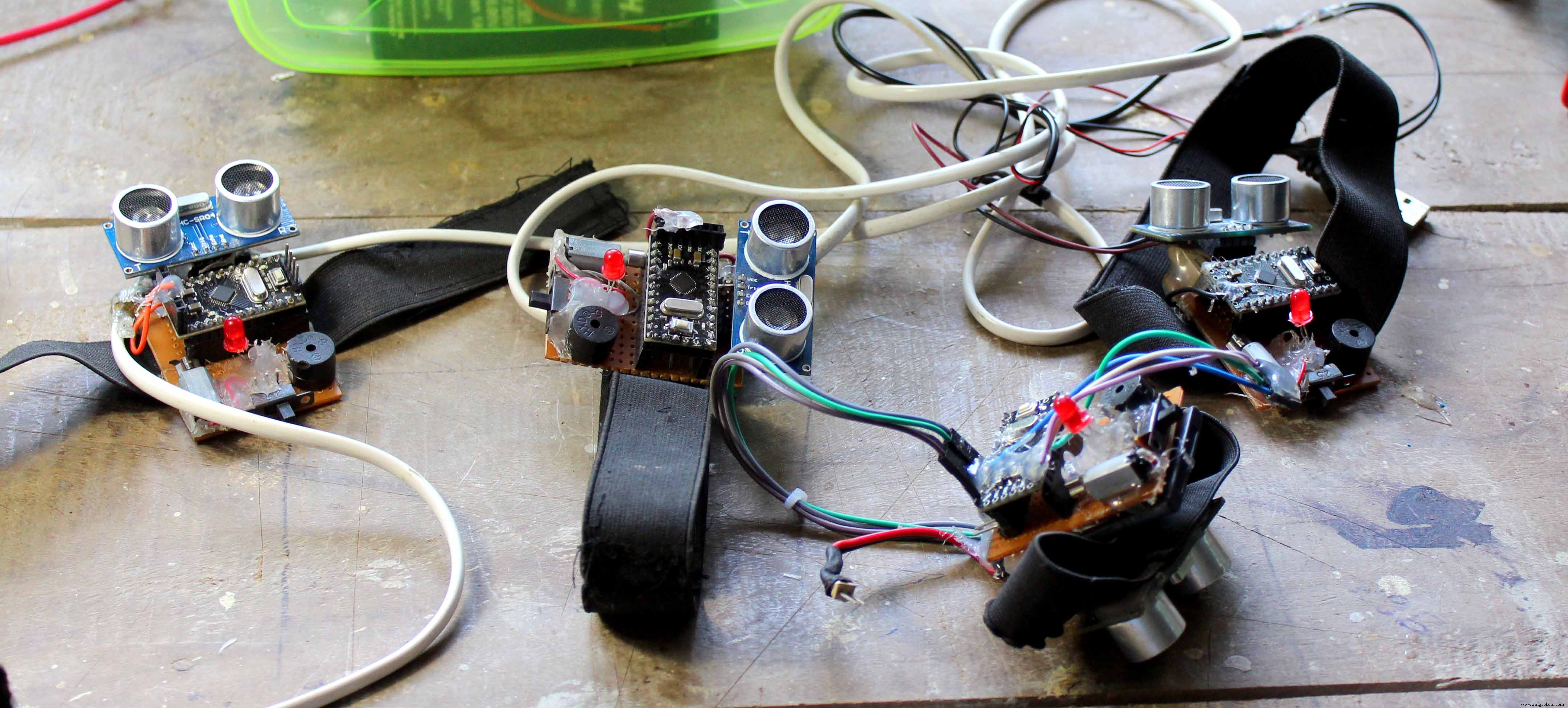
- 目の不自由な人のための最初のウェアラブルテクノロジー
- 超音波を使用して障害物を検出する
- バイブレーション/ブザー音でユーザーに通知する
目の不自由な人のための第三の目は、超音波の助けを借りて近くの障害物を検出し、ブザーの音や振動でそれらに通知することによって、目の不自由な人がスピードと自信を持ってナビゲートするのを助ける革新です。彼らはこのデバイスをバンドまたは布として着用するだけで済みます。
WHOによると、世界中で3,900万人が視覚障害者と推定されています。彼らは日常生活の中で多くの困難に苦しんでいます。影響を受けた人々は長年伝統的な白い杖を使用してきましたが、それは効果的ではありますが、それでも多くの欠点があります。別の方法は、犬などのペットの動物を飼うことですが、それは本当に高価です。そのため、このプロジェクトの目的は、視覚障害者がより快適に、スピードを上げて、自信を持ってナビゲートできるようにするための、安価で効率的な方法を開発することです。
ビデオ
動作しているビデオをご覧ください。
ニュースチャンネル(マラヤーラム語)で配信された動画を見る
プロジェクトの目新しさ: これは、既存のテクノロジーのすべての問題を解決する、視覚障害者向けの最初のウェアラブルテクノロジーです。現在、視覚障害者向けのナビゲーション用の機器やスマートデバイスは数多くありますが、それらのほとんどは持ち運びに一定の問題があり、主な欠点は、使用するために多くのトレーニングが必要なことです。このイノベーションの主な特徴の1つは、誰にとっても手頃な価格であり、総コストが25ドル(〜1500INR)未満であることです。布のように着用でき、低コストでシンプルなデバイスは市場に出回っていません。プロトタイプを改善して大規模に使用すると、コミュニティに大きなメリットがあります。
ステップ1:既存のシステム <図>

- 白杖
- ペットの犬
- スマートデバイス(例:ブラインド用のトーチのビジョン)
既存のシステムの問題:
- 白杖-簡単に割れたり壊れたりする可能性があります。スティックがさまざまな物体の舗装の亀裂に引っかかる可能性があります。
- ペットの犬-莫大な費用。 (〜$ 42,000 / 280000Rs)
- 一般的なデメリット(スマートデバイスを含む)持ち運びが簡単ではない 使用するには多くのトレーニングが必要です
視覚障害者のための第三の目の特徴 人: このデバイスを着用することで、彼らは白い杖やそのような他のデバイスの使用を完全に避けることができます。このデバイスは、視覚障害者が少し煩わしいスティックを持たずにナビゲートするのに役立ちます。バンドや布として着用するだけで、非常に正確に機能し、使用するためのトレーニングはほとんど必要ありません。
ステップ2:プロジェクトの完全な説明 <図>
 <図>
<図> 
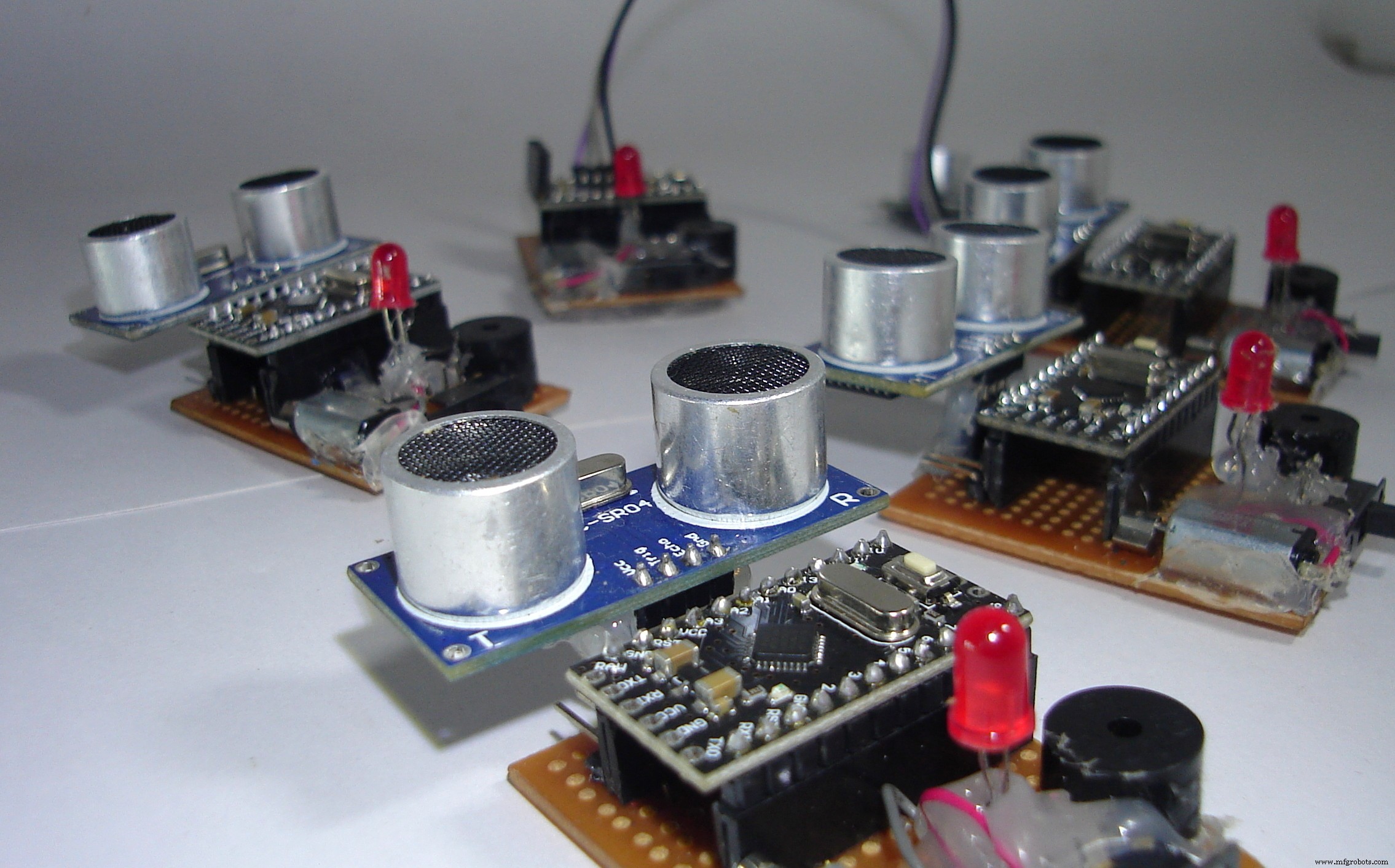
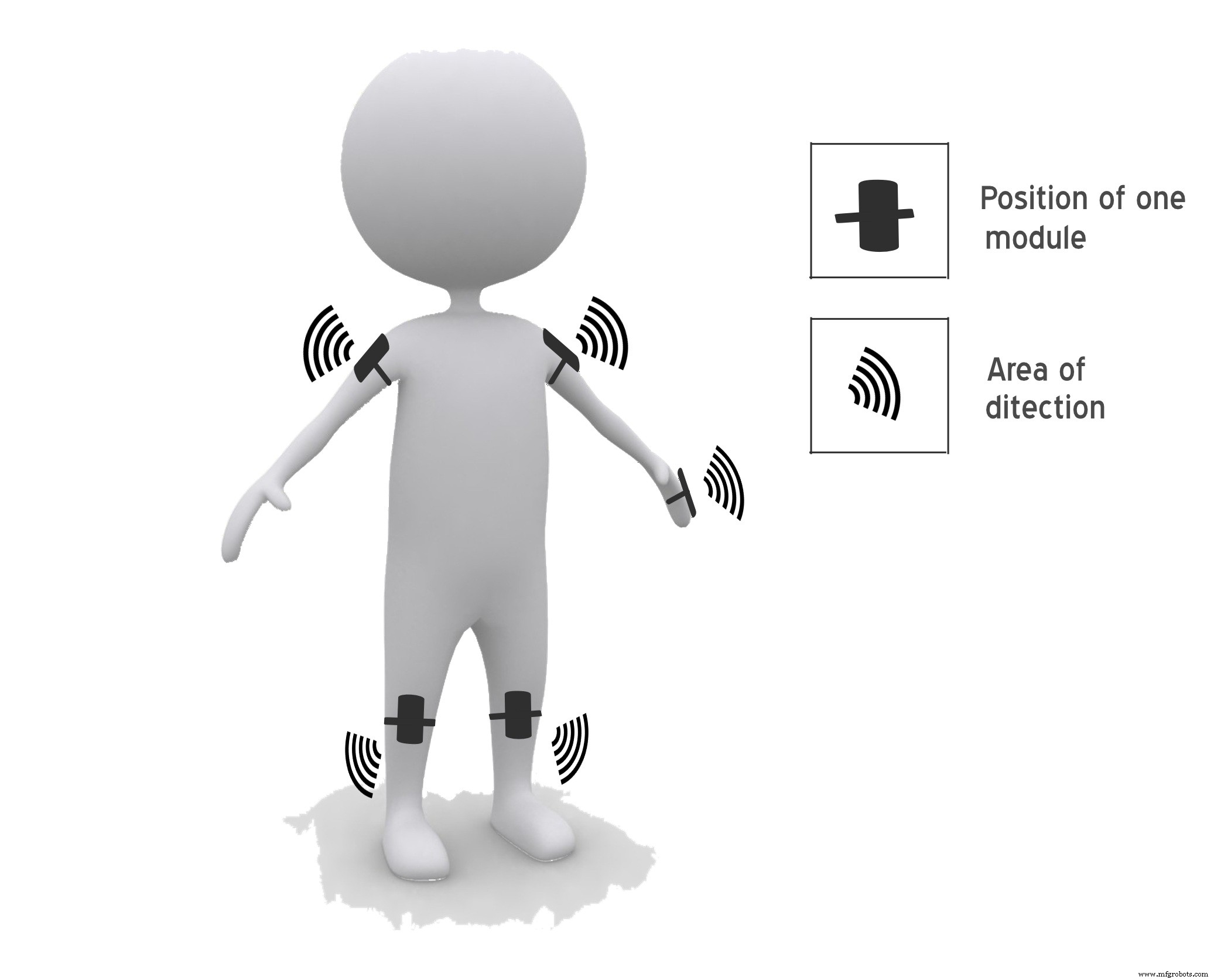
ブラインド用の布のように着用できるArduinoボードをベースにした特別なウェアラブルデバイスを設計しました。このデバイスには、体のさまざまな部分に接続された5つのモジュールで構成される5つの超音波センサーが装備されています。その中で、2つは両肩用、もう2つは両膝用、1つは手用です。 5つの超音波センサーを使用すると、目の不自由な人は周囲の5次元ビューで物体を検出でき、どこにでも簡単に移動できます。超音波センサーが障害物を検出すると、デバイスは振動とビープ音でユーザーに通知します。振動の強さとビープ音の速度は距離が短くなるにつれて増加し、これは完全に自動化されたデバイスです。
機能の改善:
プロジェクト全体をジャケットの形で作成できるため、デバイスを1つずつ着用する必要はありません。 arduinoの代わりに特別に設計されたボードと高品質の超音波センサーを使用すると、応答が速くなり、混雑した場所でもデバイスを動作させることができます。
ステップ3:視覚障害者の助けを借りて正常にテストされました。 <図>

これについて詳しくは、をご覧ください。 FBの投稿学校の理科の先生による。
このイノベーションで受賞しました。
- PPTイノベーションアワードの最初の価格
- 州レベルの科学博覧会の2番目の価格。 (ケララ州政府が実施)
ステップ4:アイデアのプロトタイピング-使用部品 <図>
<図>

<図>
資料
- 5 x Arduino pro mini
- 5x超音波センサー
- 5x設定ボード
- 5x振動モーター
- 5xブザー
- 5x赤色LED
- 5xスイッチ
- オスとメスのヘッダーピン
- 4xジャンパーケーブル
- 1つのパワーバンク
- 3.3ボルトの古いモバイルバッテリー1個
- いくつかのゴムとステッカー(着用用のバンドとして使用するため)
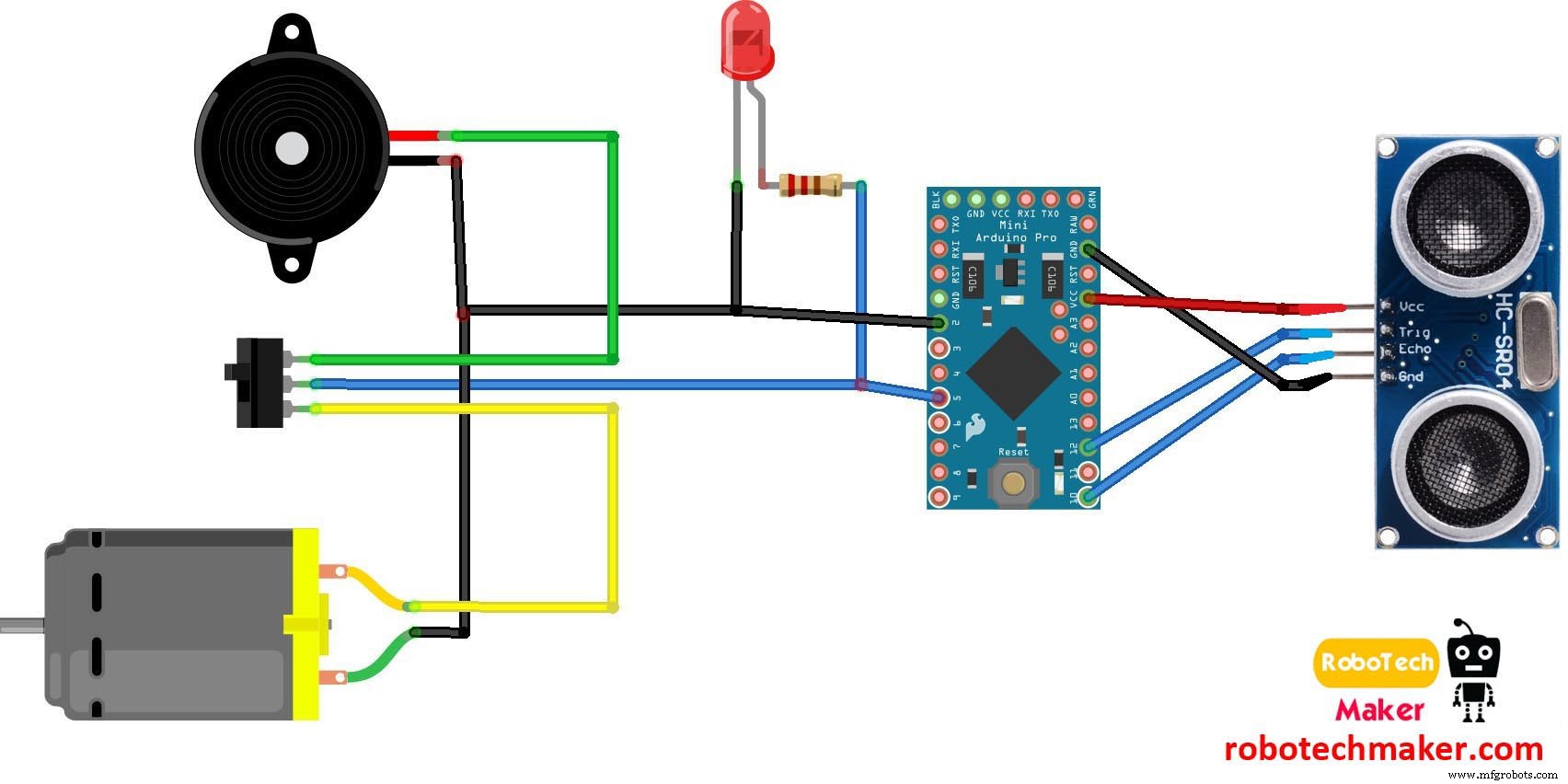
ステップ5:回路図 <図>
 <図>
<図> 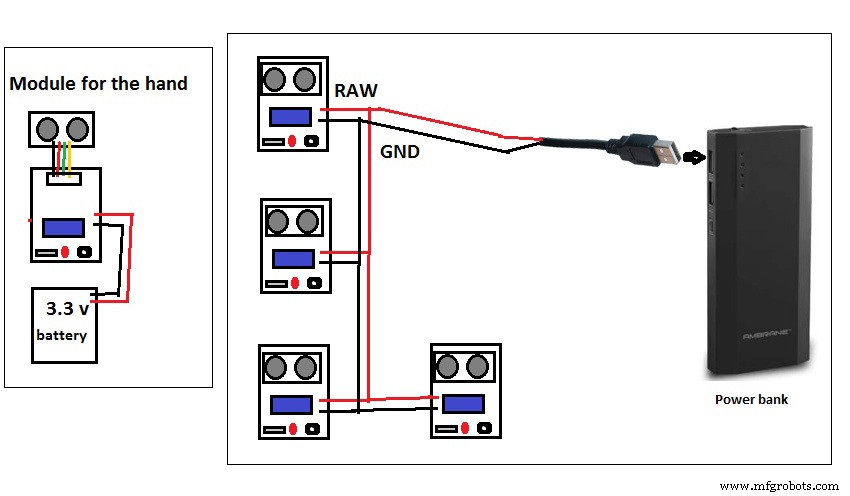
配線手順。
- arduinoのGNDへのLED、ブザー、振動モーターのアース
- + veのLEDとArduinoピン5へのスイッチの中央の脚
- スイッチの最初のレグへのブザーの+ ve
- + veの振動モーターからスイッチの3番目の脚まで
- 超音波センサー
- 超音波センサーピンVCC-ArduinoピンVCC
- 超音波センサーピンGND-ArduinoピンGND
- 超音波センサーピンTrig-Arduinoピン12
- 超音波センサーピンエコー-ArduinoPIN 12
ここで使用されるスイッチは、モードを選択するためのものです。 (ブザーまたはバイブレーションモード。)
図2-モジュールへの電力供給-4arduino pro miniをUSBオスピンに接続し、パワーバンクに接続します。手元のモジュールには、小型のリチウム電池を使用してください。
ステップ6:モジュールの作成 <図>
<図>
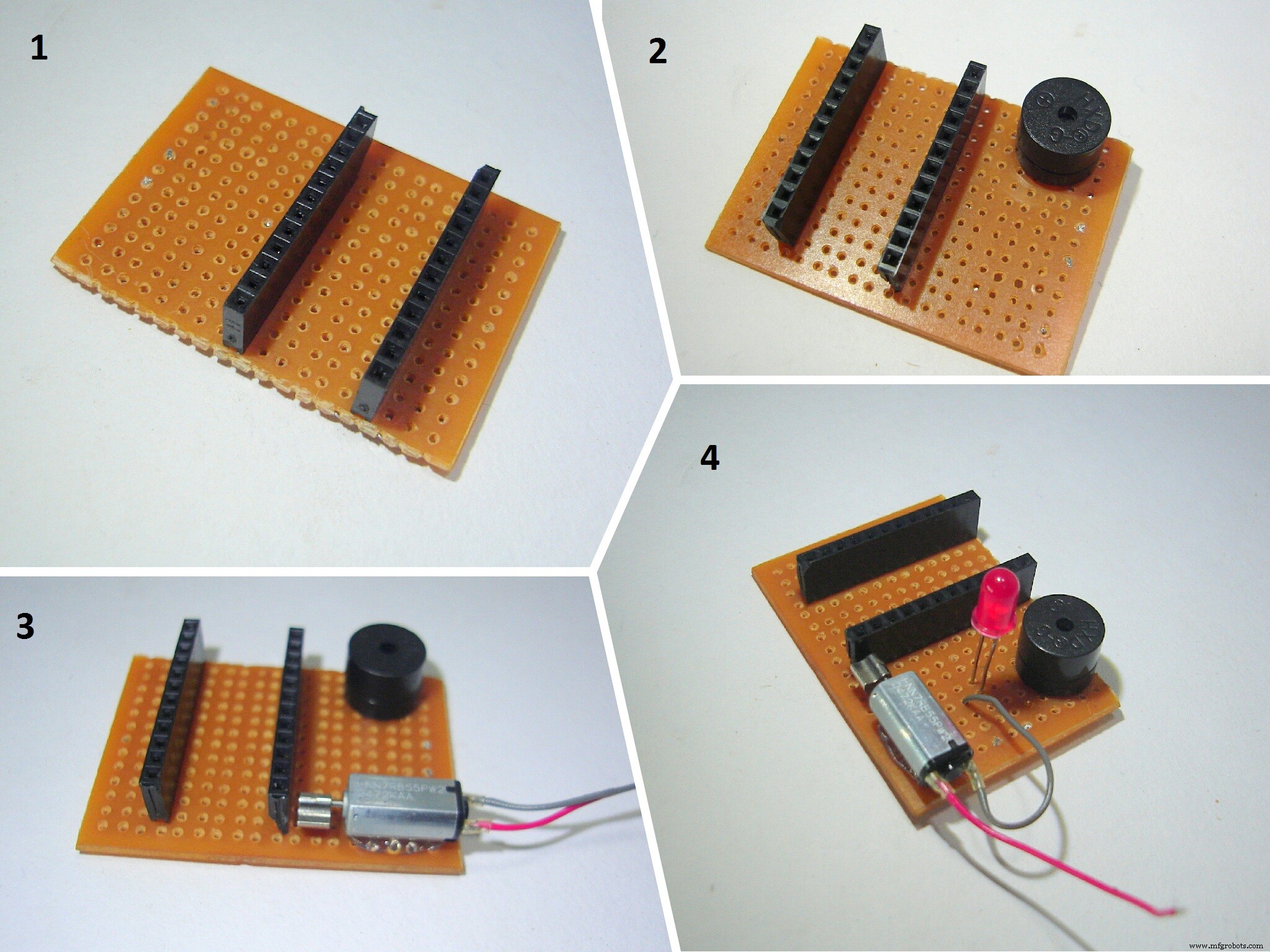
- まず、設定ボードを5 X 3 cmの寸法にカットし、Arduinoのメスヘッダーをボードにはんだ付けします。
- 次にブザーをはんだ付けします。
- 次に、接着剤ガンとはんだワイヤーを使用して振動モーターを接続します。
- 次に、LEDを接続します。
- 次に、スイッチを接続します。
- 次に、超音波センサーとバッテリー入力用のヘッダーピンを接続します。
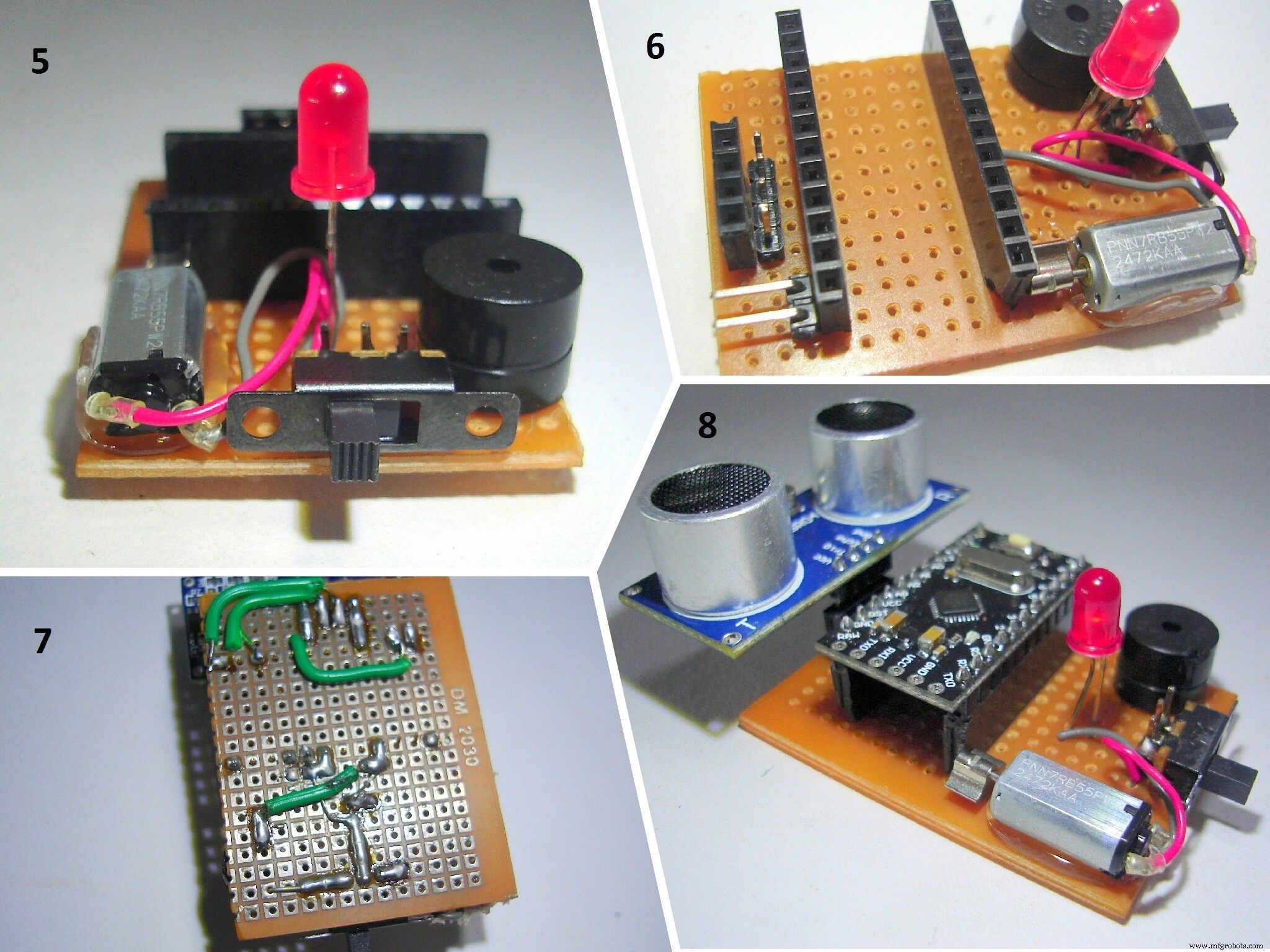
- 次に、回路図に示すようにすべてをはんだ付けします。
- 次に、Arduinoと超音波センサーをボードに接続します
また、ゴムバンドをすべてのモジュールに接続します。
上記と同じ方法でさらに3つのモジュールを作成する必要がありますが、手元のモジュールには少し違いがあります。最後のモジュールを作成する前に、次のステップにアクセスしてください。
ステップ7:コード+手用のモジュールの作成 <図>
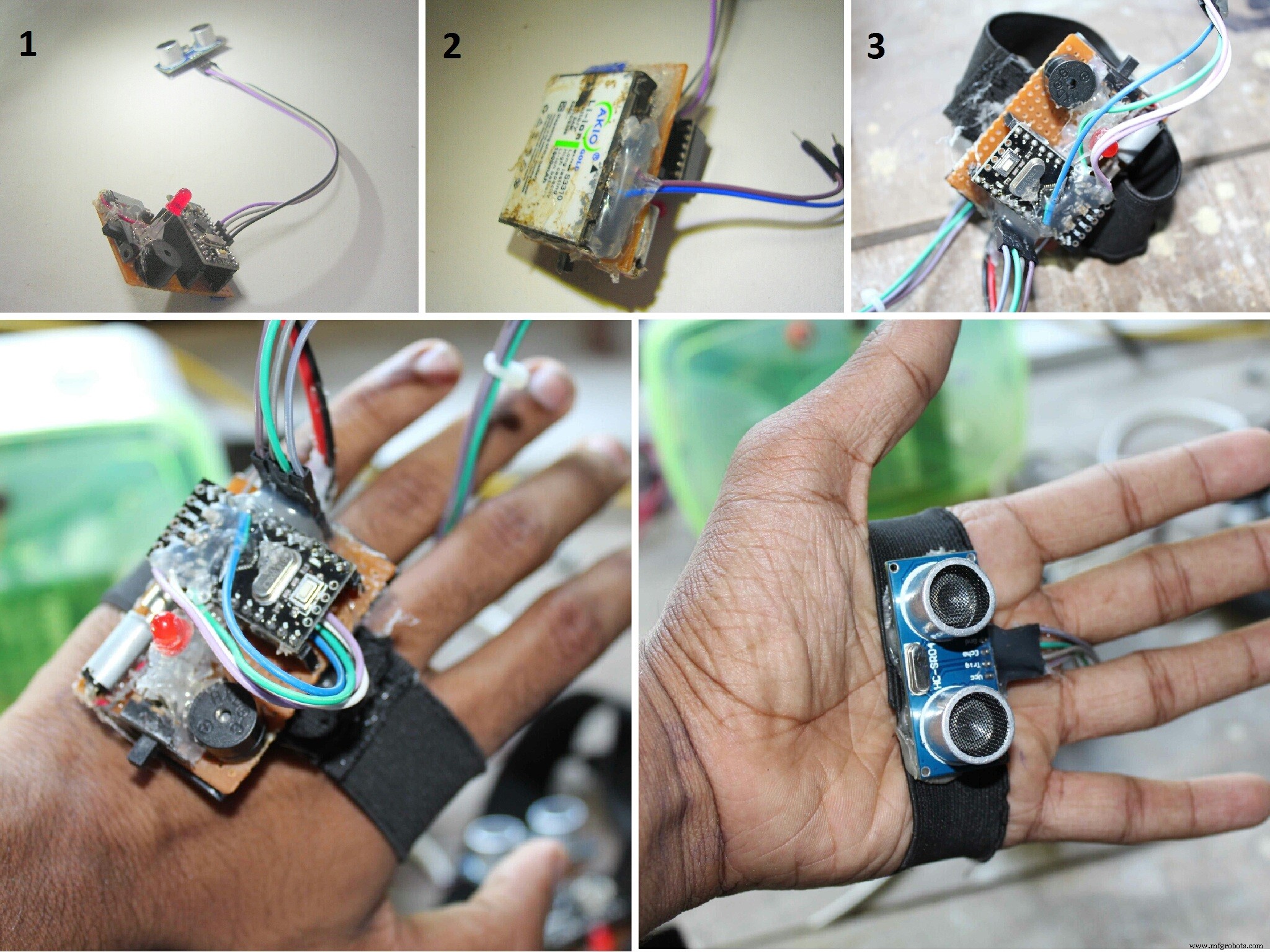
- 4本のジャンパーケーブルを使用して、超音波センサーをボードに接続します。
- 次に、3.7ボルトのモバイルバッテリーをこのモジュールに接続します。
- 次に、図に示すようにゴムバンドを接続します。
最後に、コードを各Arduinoボードにアップロードし、パワーバンクを使用して他の4つのモジュールに電力を供給します。
Arduinoで使用されるコード:
// VISIT:www.robotechmaker.com const int pingTrigPin =12; // PIN7に接続されたトリガーconstint pingEchoPin =10; //エコー接続されたyoPIN 8 int buz =5; // PIN4へのブザーvoidsetup(){Serial.begin(9600); pinMode(buz、OUTPUT); } void loop(){長い期間、cm; pinMode(pingTrigPin、OUTPUT); digitalWrite(pingTrigPin、LOW); delayMicroseconds(2); digitalWrite(pingTrigPin、HIGH); delayMicroseconds(5); digitalWrite(pingTrigPin、LOW); pinMode(pingEchoPin、INPUT);期間=pulseIn(pingEchoPin、HIGH); cm =microsecondsToCentimeters(duration); if(cm <=50 &&cm> 0){int d =map(cm、1、100、20、2000); digitalWrite(buz、HIGH); delay(100); digitalWrite(buz、LOW); delay(d); } Serial.print(cm); Serial.print( "cm"); Serial.println(); delay(100); } long microsecondsToCentimeters(long microseconds){return microseconds / 29/2; } Third_eye_for_blinds.ino
コード
- arduinoで使用されるコード
arduino C / C ++ で使用されるコード
// VISIT:www.robotechmaker.com const int pingTrigPin =12; // PIN7に接続されたトリガーconstint pingEchoPin =10; //エコー接続されたyoPIN 8 int buz =5; // PIN4へのブザーvoidsetup(){Serial.begin(9600); pinMode(buz、OUTPUT); } void loop(){長い期間、cm; pinMode(pingTrigPin、OUTPUT); digitalWrite(pingTrigPin、LOW); delayMicroseconds(2); digitalWrite(pingTrigPin、HIGH); delayMicroseconds(5); digitalWrite(pingTrigPin、LOW); pinMode(pingEchoPin、INPUT);期間=pulseIn(pingEchoPin、HIGH); cm =microsecondsToCentimeters(duration); if(cm <=50 &&cm> 0){int d =map(cm、1、100、20、2000); digitalWrite(buz、HIGH); delay(100); digitalWrite(buz、LOW); delay(d); } Serial.print(cm); Serial.print( "cm"); Serial.println(); delay(100); } long microsecondsToCentimeters(long microseconds){return microseconds / 29/2; } 回路図
製造プロセス