


MATLAB-Simulink
Simulink は、MATLAB と統合された動的および組み込みシステム用のシミュレーションおよびモデルベースの設計環境です。同じく MathWorks によって開発された Simulink は、マルチドメイン動的システムのモデリング、シミュレーション、および解析のためのデータ フロー グラフィカル プログラミング言語ツールです。これは基本的に、ブロック ライブラリのカスタマイズ可能なセットを備えたグラフィカルなブロック ダイアグラム ツールです。
これにより、MATLAB アルゴリズムをモデルに組み込み、さらに分析するためにシミュレーション結果を MATLAB にエクスポートできます。
Simulink のサポート −
- システム レベルの設計
- シミュレーション
- 自動コード生成
- 組み込みシステムのテストと検証
MathWorks とサードパーティのハードウェアおよびソフトウェア製品が提供する、Simulink で使用できるアドオン製品が他にもいくつかあります。
次のリストは、それらのいくつかの簡単な説明を示しています −
- <リ>
ステートフロー ステート マシンとフローチャートを開発できます。
<リ>Simulink コーダー システムをリアルタイムで実装するための C ソース コードを自動的に生成できます。
<リ>xPC ターゲット x86 ベースのリアルタイム システムとともに 物理システム上で Simulink および Stateflow モデルをリアルタイムでシミュレートおよびテストするための環境を提供します。
<リ>組み込みコーダー 特定の埋め込みターゲットをサポートします。
<リ>HDLコーダー 合成可能な VHDL と Verilog を自動的に生成できます。
<リ>シムイベント キューイング システムをモデリングするためのグラフィカルなビルディング ブロックのライブラリを提供します。
Simulink は、モデリング スタイルのチェック、要件のトレーサビリティ、およびモデル カバレッジ分析を通じて、モデルの体系的な検証と妥当性確認を行うことができます。
Simulink Design Verifier を使用すると、設計エラーを特定し、モデル チェック用のテスト ケース シナリオを生成できます。
Simulink の使用
Simulink を開くには、MATLAB ワークスペースに入力します −
simulink
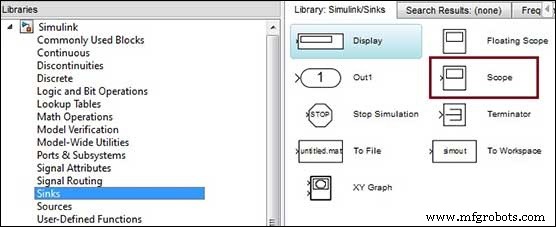
ライブラリ ブラウザで Simulink が開きます .ライブラリ ブラウザは、シミュレーション モデルの構築に使用されます。
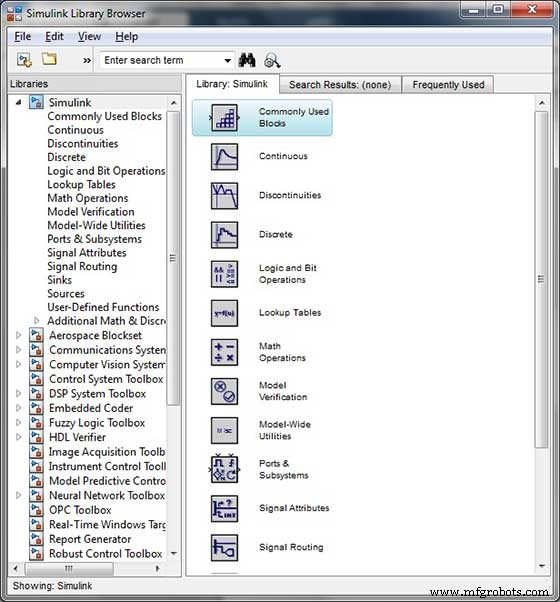
左側のウィンドウ ペインには、さまざまなシステムに基づいて分類されたいくつかのライブラリがあり、それぞれをクリックすると、右側のウィンドウ ペインに設計ブロックが表示されます。
モデルの構築
新しいモデルを作成するには、新規 ライブラリ ブラウザーのツールバーの ボタンをクリックします。これにより、新しい無題のモデル ウィンドウが開きます。
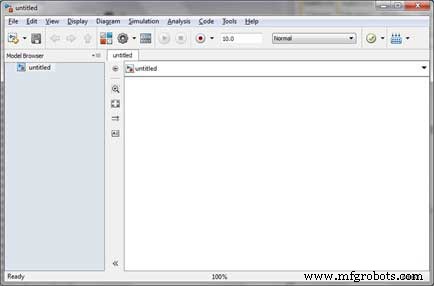
Simulink モデルはブロック線図です。
モデル要素は、ライブラリ ブラウザーから適切な要素を選択し、モデル ウィンドウにドラッグすることで追加されます。
または、モデル要素をコピーしてモデル ウィンドウに貼り付けることもできます。
例
Simulink ライブラリから項目をドラッグ アンド ドロップして、プロジェクトを作成します。
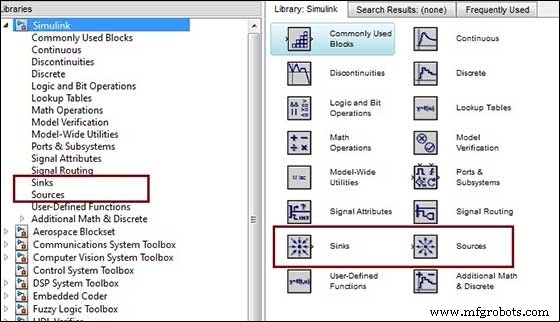
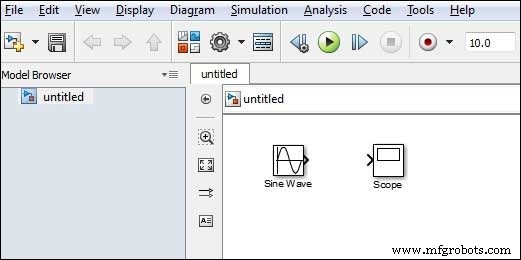
この例では、2 つのブロックがシミュレーションに使用されます - A Source (シグナル) と シンク (スコープ)。信号発生器 (ソース) がアナログ信号を生成し、スコープ (シンク) によってグラフィカルに視覚化されます。
必要なブロックをライブラリからプロジェクト ウィンドウにドラッグすることから始めます。次に、あるブロックの接続ポイントから別のブロックの接続ポイントにコネクタをドラッグして、ブロックを一緒に接続します。
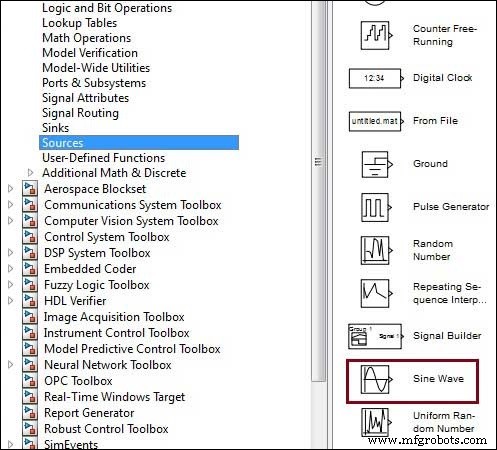
「Sine Wave」ブロックをモデルにドラッグしましょう。
ライブラリから「シンク」を選択し、「スコープ」ブロックをモデルにドラッグします。
Sine Wave ブロックの出力から Scope ブロックの入力に信号線をドラッグします。
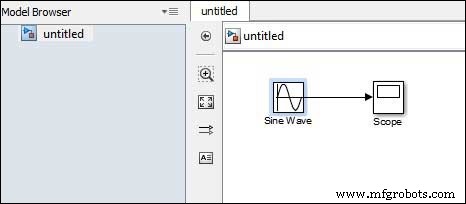
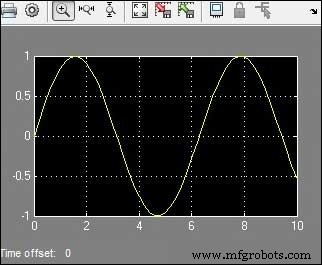
[実行] ボタンを押してシミュレーションを実行します。 ' ボタン、すべてのパラメーターをデフォルトのままにします ([シミュレーション] メニューから変更できます)
スコープから以下のグラフを取得する必要があります。
MATLAB